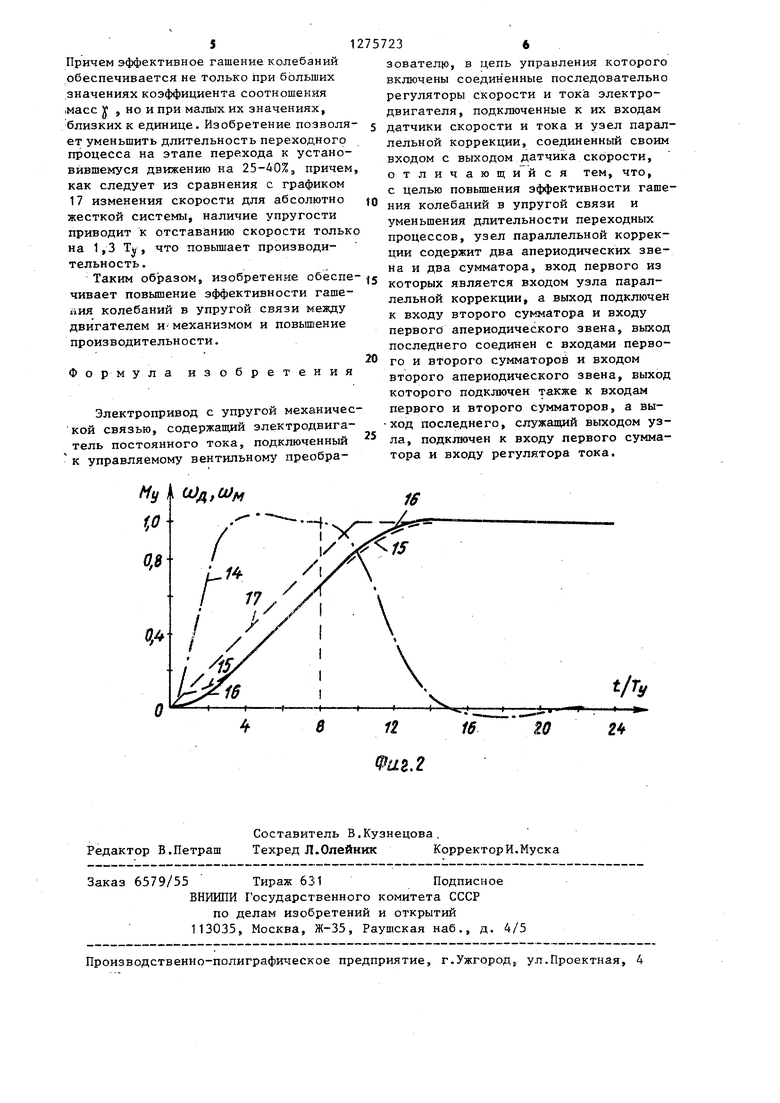
Изобретение относится к электротехнике, а именно к электроприводам с упругой связью между двигателем и механизмом, и может применяться в электроприводах драглайнов, кранов лифтов, подъемников, ир-цытательных стендов, бумагоделательных машин, промьшленных роботов и манипуляторо Цель изобретения - повышение эффективности гашения колебаний в упру гой связи и уменьшение длительности переходных процессов. На фиг.1 приведена функциональная схема электропривода; на фиг.2 вр менные диаграммы, характеризующие его работу, Электропривод с упругой механиче кой связью 1 между механизмом 2 и электродвигателем -3 содержит управляемый вентильный преобразователь 4 в цепь управления которого включены соединенные последовательно регуляторы 5 и 6 скорости и тока электродвигателя, подключенные к их входам датчики 7 и 8 скорости и тока соотве ственно, и узел 9 параллельной корре |Ции, соединенный входом с выходом да чика 7 скорости. Узел 9 параллельной коррекции содержит апериодические звенья 10 и 11 и сумматоры 12 и 13, вход первого из которых является входом узла параллельной коррекции, а выход подключен к входу сумматора 13 и входу апериодического звена 10, выход последнего соединен с входами сумматоров 12 и 13 и входом апериоди ческого звена.11, выход которого под ключен также к входам сумматоров 12 и 13, а выход последнего, служащий выходом узла, подключен к входу сумматора 12 и входу регулятора 6 тока, На фиг.2 приведены длл режима раз гона электропривода графики изменени момента Мц и упругой связи (график 14), скорости сОд электродвигателя (график 15) и скорости « механизма (график 16), а также для сравнения график 17 изменения скорости электро двигателя и механизма при абсолютно жесткой связи между ними, Электропривод работает следующим образом. - Коэффициенты усиления апериодичес ки звеньев Ю и 11 выбираются равны ми единице, а их постоянные времени равными постоянной времени упругой связи -4г.4Л упругой связи; нерции двигателя и . аточные функции опмостью1 + рТи 1 т HJ-y ходные сигналы апеев 10 и 11 соответсиления сумматоров ходам выбираются м уравнениям, харакмость их выходных от входных сиг) -f V-(y-i)Uc, U,); U,, + коэффициент соотношения масс; коэффициент затухания колебаний в упругой связи; требуемый коэффициент затухания колебаний, который по оптимизации электропривода по техническому оптимуму выбирается равным /2; механическ Кдкая постоянная времени электропривода, численно равная времени разгона абсолютно жесткой системы до номинальной скорости (О ц при номинальном моменте двигателя передаточный коэффициент датчика скорости; коэффициент пропорциональности между установившимися значениями момента
электродвигателя и входного сигнала регулятора тока.
При этом зависимость сигнала обратной связи Up,, р от выходного сиг- 5 нала датчика скорости U определяется передаточной функцией
- i2TiT45ili :J4)2f . . V UA.C ,р -ь
Если принять постоянные времени апериодических звеньев равными T Ty-fip, то узел 9 параллельной коррекции может быть упрощен за счет исключения связи между выходом сумматора 13 и выходом сумматора 12 при сохранении указанной зависимости.
При подаче на вход регулятора 5 скорости сигнала и, задания скороети его выходной сигнал Up практически скачком увеличивается до максимального знаЧ:ёния и остается постоянным. Учитывая, что параметры движения электропривода в зависимости от входного сигнала регулятора тока
ах.р.т рс ос определяются передаточными функциями (при малой инерционности контуров регулирования тока и скорости по сравнению с постоянной времени упругой связи)
)Г- 1
М К(р) 1 + ,,р + Тур% с учетом сигнала обратной связи с выхода узла 9 параллельной коррекции, определяемого передаточной функцией (4),. можно установить, что в указанном режиме изменение параметров дви;жения электропривода характеризуется передаточными функциями .MI . ;. (5) ISD,(p) i, . Ii2|,T ElTli E . .(6) рТм D,(p) | li2|,. ир.с/Кд.с рТм D,Tp)
где D,(p) 1 + 2,T;jt) + т.е. обеспечивается изменение параметров движения с требуемым коэффициентом затухания . При этом момент М,, в упругой связи плавно с перерегулированием меньше пяти процентов возрастает до установившегося значения (график 14), а скорости двигателя сОд (график 15) и механизма со„ (график 16) также плавно переходят к линейно нарастающему графику (к равноускоренному движению).
При приближении скорости электродвигателя к установившемуся значеншо регулятор скорости переходит на линейный участок его.характеристики и изменение параметров движения электропривода при этом характеризуется передаточными функциями
JLlI ЕТй
.. JL . -titf - . (8)
У 5г(р)
где D,(p) 1 + (2,1. )p +
За К
PC
, (т%.|,,л,т,р.,|1т,рЗ.
J К PC к р р Выбором величины коэффициента усиления регулятора скорости обеспечивается плавное уменьшение момента в упругой связи и плавный переход скорости электродвигателя и механизма к установившемуся значению (фиг.2). Графики построены для характерных для электроприводов поворота и перемещения груза экскаваторов и кранов: 0,05; 1,2; ,, 10; К 0,3 ,. Предлагаемый электропривод обеспечивает эффективное гашение колебаний не только при работе на линейном участке характерисг ики регулятора скорости (при переходе к установивцемуся значению скорости), но и при работе на участке ограничения (переход к равноускоренному движению), а также исключаются ошибки реального дифференцирования, используемого в известном электроприводе, что повышает эффективностьгашения колебаний Причем эффективное гашение колебаний обеспечивается не только при больших значениях коэффициента соотношения .масс у , но и при малых их значениях, близких к единице. Изобретение позволя ет уменьшить длительность переходного процесса на этапе перехода к установившемуся движению на 25-40%„ причем как следует из сравнения с графиком 17 изменения скорости для абсолютно жесткой системы, наличие упругости приводит к отставанию скорости тольк на 1,3 Ту, что повьшает производительность. Таким образом, изобретение обеспе чивает повышение эффективности гашеиия колебаний в упругой связи между двигателем Имеханизмом и повышение производительности. Формула изобретения Электропривод с упругой механичес кой связью, содержащий электродвигатель постоянного тока, подключенный к управляемому вентильному преобразовател(о, в цепь управления которого включены соединенные последовательно регуляторы скорости и тока электродвигателя, подключенные к их входам датчики скорости и тока и узел параллельной коррекции, соединенный своим входом с выходом датчика скорости, отличающийся тем, что, с целью повышения эффективности гашения колебаний в упругой связи и уменьшения длительности переходных процессов, узел параллельной коррекции содержит два апериодических звена и два сумматора, вход первого из которых является входом узла параллельной коррекции, а выход подключен к входу второго сумматора и входу первого апериодического звена, выход последнего соединен с входами первого и второго сумматоров и входом второго апериодического звена, выход которого подключен также к входам первого и второго сумматоров, а выход последнего, служащий выходом узла, подключен к входу первого сумматора и входу регулятора тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с упругой механической связью | 1986 |
|
SU1436254A1 |
| Электропривод лебедки экскаватора-драглайна | 1991 |
|
SU1775832A1 |
| Электропривод с упругой связью между электродвигателем и механизмом | 1984 |
|
SU1192093A1 |
| Электропривод | 1978 |
|
SU790090A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С УПРУГИМИ СВЯЗЯМИ | 2012 |
|
RU2513871C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Устройство для управления механизмом поворота драглайна | 1986 |
|
SU1384682A1 |
| Самонастраивающийся электропривод робота | 1988 |
|
SU1618643A1 |
| Электропривод постоянного тока | 1987 |
|
SU1555793A1 |
| Самонастраивающийся электропривод робота | 1990 |
|
SU1773714A1 |
Изобретение относится к электротехнике и может быть использовано в электроприводах драглайнов, кранов, лифтов. Электропривод построен по принципу подчиненного регулирования с регуляторами 5,6 скорости и тока и снабжен узлом 9 параллельной коррекции, соединенным своим входом с выходом датчика 7 скорости, а выходом с входом регулятора тока 6. Эффективное гашение колебаний обеспечивается не только при работе на линейном участке характеристики регулятора скорости, но и при работе на участке ограничения, причем не только при больших значенияхкоэффициента соотношения массу , но и при малых их значениях, близких к единице. Предложение позволяет уменьшить длительсл с: ность переходного процесса на этапе перехода к установившемуся движению на 25-40%. 2 ил. ю :д .tc 
| КАТОДОЛЮМИНЕСЦЕНТНАЯ ИЗЛУЧАЮЩАЯ ЛАМПА | 2003 |
|
RU2260224C2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Борцов Ю.А., Соколовский Г.Г | |||
| Ти-ристорные системы электропривода с упругими связями | |||
| - Л.: Энергия, 1979, с | |||
| Капельная масленка с постоянным уровнем масла | 0 |
|
SU80A1 |
