1
Изобретение относится к системам автоматического управления электроприводами постоянного тока, которые работают в режимах набросов нагрузки и в которых вследствие этого возникают значительные электрические и механические перегрузки. К таким электроприводам относятся, например, приводы копающих механизмов одноковшовых экскаваторов, для которых характерно изменение нагрузки в широких пределах, включая работу на уиор.
В современных системах подчиненного регулирования, содержащих регуляторы тока и напряжения, токоограничение осуществляется за счет ограничения выходного сигнала регулятора напряжения.
Известна система управления электроприводом постоянного тока по системе управляемый преобразователь-двигатель, содерл ащая включенное в канал управления преобразователем ограничивающее звено, на вход его уставки подключен регулируемый задатчик допустимого напряжения преобразователя, в цепи входа которого включены через ключевой элемент с выдержкой при размыкании элементы уставки, а вход ключевого элемента через элемент с характеристикой тииа «зоны нечувствительности подключен к выходу датчика тока.
Такая система дает возможность хорошо формировать переходные процессы в пускотормозных режимах. Однако при воздействии нагрузки, превышающей стопорное значение, или при работе механизма на упор указанная схема недостаточно эффективно ограничивает выбросы тока двигателя, которые в этих случаях могут превысить допустимые значения. Особенно это касается систем с упругими механическими связями, в которых стоиорение исполнительного органа может сопроволадаться также сильными колебаниями момента в механических передачах с амплитудами, близкими к пределу прочности механического оборудования.
Цель изобретения - повышение надежности и долговечности работы электрического и механического оборудования за счет уменьшения выбросов тока двигателя и момента в механических нередачах за допустимые значения и снижение колебательности этих величии при воздействии на привод нагрузок, превышающих допустимое значение.
Для этого в предлагаемой системе ключевой элемент включен между выходом датчика напряжения и входом регулятора тока.
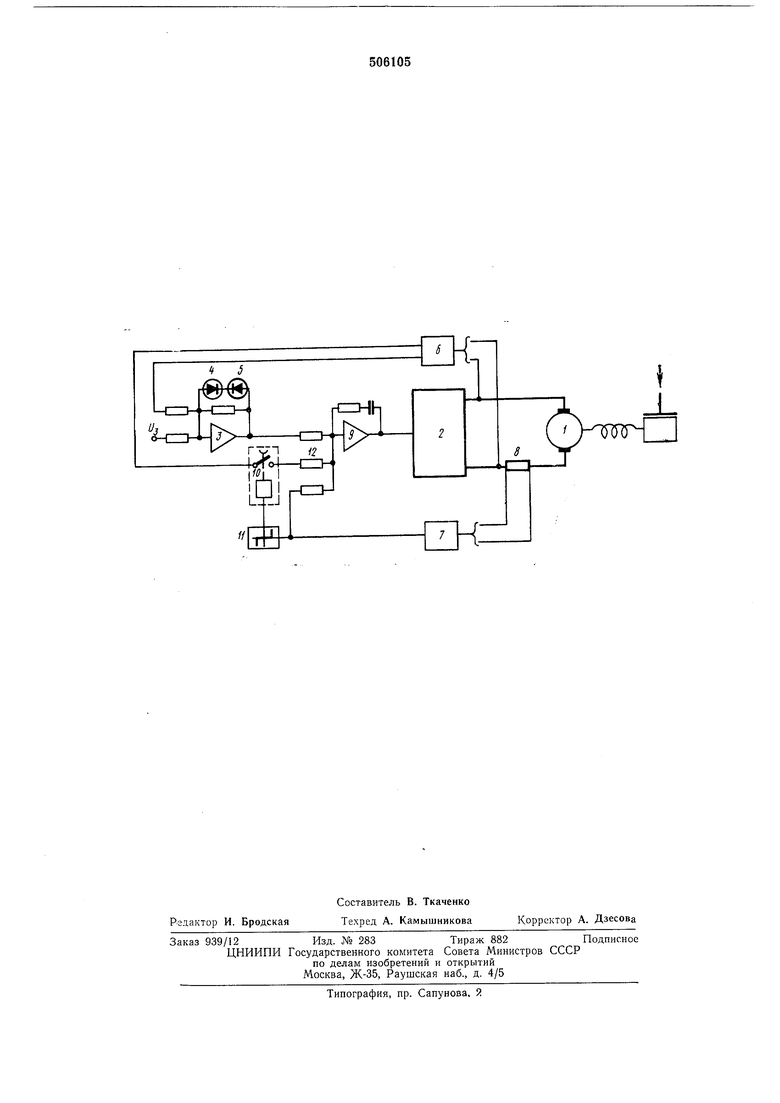
На чертеже приведена схема предлагаемой системы подчиненного регулирования электроприводом постоянного тока.
Двигатель 1 питается от преобразователя 2. Система регулирования с последовательным включением регулятором является двухконтурпой. Внешний контур регулирования напряжения состоит из регулятора напряжения 3 с ограничивающими стабилитронами 4 и 5 и датчика напряжения 6. Внутренний контур регулирования тока содержит датчик тока 7, преобразующий сигнал, который поступает от шунта 8 в силовой цепи двигателя, и регулятор тока 9. На вход регулятора тока 9 поступает сигнал выхода регулятора напряжения 3 и сигналы обратных связей - линейной обратной связи по току и нелинейной обратной связи по напряжению двигателя. Последняя содержит ключевой элемент 10 с выдерлской времени на размыкание, с помощью которого иа входной резистор И регулятора тока 9 подается сигнал от датчика напряжения 6. Цепь включения ключевого элемента 10 получает питание от датчика тока 7 через нелинейный элемент 12 с характеристикой типа «зона нечувствительности.
Режим работы системы зависит от нагрузки двигателя. При таких нагрузках двигателя, когда напряжение датчика тока 7 не превосходит опорного напряжения t/on элемента «зона нечувствительности, нелинейная обратная связь по напряжению в контуре тока не включена и система управления работает как обычная двухконтурная система подчиненного регулирования с последовательным включением регуляторов. Если же нагрузка привода увеличится так, что ток якоря /я превысит на 10-13% стопорное значение /стоп, напряжение f/дт датчика тока станет больше, чем опорное напряжение UQU элемента 11. При этом на управляющий орган ключевого элемента поступит разность напряжений бдт- Lon, под действием которого ключевой элемент включится и сигнал от датчика напряжения 6 поступит на регулятор тока 9. Сигнал, поступающий от датчика напряжения, совпадает по знаку с сигналом от датчика тока и противоположен по знаку сигналу от регулятора напряжения. В результате этого в момент включения ключа 10 на преобразователь 2 через регулятор тока 9 поступает сильный сигнал, направленный на уменьшение напряжения преобразователя 2. Это вызывает интенсивное снижение напряжения преобразователя, уменьшение тока двигателя и момента в механической передаче. В дальнейшем, вследствие того, что напряжение преобразователя снижается, уменьшается и сигнал дополнительной обратной связи. Это снособствует демпфированию колебаний тока двигателя и момента в упругой механической передаче. Отключение дополнительной обратной связи по напряжению в контуре тока происходит не сразу, а спустя время выдержки после того, как сигнал датчика тока снова станет меньше опорного напряжения ои элемента тина «зона нечувствительности. Введение выдержки времени сокращает количество повторных срабатываний ключа 10, что в конечном итоге делает более спокойпыми процессы в электроприводе, вызванные действием больших нагрузок. Величина выдержки времени выбирается больше, чем половина периода колебаний тока при стопорении привода, а глубина нелинейной обратной связи по напряжению в контуре тока - из условия заданного токоограничения в самом тяжелом режиме воздействия нагрузки, а также из условия наилучшего демпфирования колебаний момента в системах с упругими механическими связями.
Формула изобретения
Система пОуЧчиненного регулирования электропривода постоянного тока с регуляторами тока и напряжения, содержащая ключевой элемент с выдержкой при размыкании, управляющий вход которого подключен через элемент с характеристикой типа «зоны нечувствительности к выходу датчика тока, о т л ичающаяся тем, что, с целью повышения надежности и долговечности оборудования за счет повыше1 ия эффективности токоограничеиия, ключевой элемент включен между выходом датчика напряжения и входом регулятора тока.
-czHh
{И;:
Гч;.1 2

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Устройство для управления электроприводом постоянного тока | 1970 |
|
SU515230A1 |
| Устройство для управления процессом выбора зазоров механических передач в двухдвигательном электроприводе поворота экскаватора | 1983 |
|
SU1129301A1 |
| Электропривод с подчиненным регулированием параметров | 1979 |
|
SU896733A1 |
| УСТРОЙСТВО ТОКООГРАНИЧЕНИЯ В СИСТЕМАХ ПОДЧИНЕННОГО РЕГУЛИРОВАНИЯ | 1973 |
|
SU368705A1 |
| Электропривод с подчиненным регулированием параметров | 1981 |
|
SU997215A2 |
| Регулируемый электропривод постоян-НОгО TOKA | 1977 |
|
SU817951A1 |
| Электропривод постоянного тока | 1987 |
|
SU1628173A1 |
| Устройство для управления копающим механизмом экскаватора | 1976 |
|
SU730939A1 |
| Устройство для управления двухдвигательным электроприводом | 1978 |
|
SU864477A1 |