Изобретение относится к измерительной технике и применимо при разработках в области создания лазерных принтеров, устройств ввода графической информации в ЭВМ и сканирующих микроскопов. Для координатной привязки, выводимой с помощью принтеров, вводимой устройствами ввода графической информации или получаемой с помощью сканирующих микроскопов информации, необходимы устройства, определяющие положения сканирующих
зеркал указанных систем. Особую актуальность подобные устройства приобретают при реализации систем с цифровым хранением информации, требующих формирования CHmanqB адреса при записи и выводе информации.
Развертка по строке в упомянутых выше устройствах в большинстве случаев реализуется возвратно-поступательным перемещением светового зонда, в частности синусоидальным 1. Перемещение световоvj(д х| СО Ю 00
о зонда может быть обеспечено крутильни и колебаниями сканирующего зеркала и оответствующей оптической системой 2, ричем наиболее целесообразно использоание центральных частей синусоидальной развертки 1 ввиду меньшей нелинейности. ля функционирования упомянутых выше стройств требуется решение задачи измерения углового положения сканирующего еркала для синхронизации ввода-вывода информации 3.
Известны устройства, измеряющие уговое положение сканирующего зеркала с помощью емкостного датчика 4. В данном случае сканирующее зеркало жестко связывают с роторной пластиной датчика, которые вместе со статорной пластиной образуют конденсатор, емкость которого определяет резонансную частоту контура, зависящую от углового положения зеркала.
Недостатками данных устройств являются ограниченное быстродействие, малый диапазон измеряемых углов, необходимость термостатирования и существенная нелинейность передаточной характеристики.
Известны муаровые (растровые) измерители углового положения 5, представляющие собой осветитель, систему растров и фотоприемник, расположенный за растрами. В подобном преобразователе интенсив- ность излучения на фотоприемнике модулирована углом поворота оси, связанной со сканирующим зеркалом.
Недостатками муаровых преобразователей являются сложность изготовления растров и затруднительность дискретизации заданного углового интервала на заданное число значений.
Известно применение интерференционных угломеров для определения положения сканирующего зеркала 6.
Недостатком подобных устройств является сложность оптического узла (наличие двупреломляющей призмы, уголковых отражателей, светоделителя) и электронного блока, необходимость использования когерентного (лазерного) излучателя и для боль- шинства случаев - избыточная дискретность измерения угла.
Наиболее близким техническим решением, выбранным в качестве прототипа 7, является оптико-электронный угломер, представляющий собой фотоэлектрический коллиматор, в котором изменение угла поворота зеркала р производится по величи- не смещения изображения марки на анализаторе изображения. Излучение све- тодиода формируется объективом в параллельные пучки, которые попадают на
отражатель, жестко связываемый со сканирующим зеркалом. Отраженные пучки строят изображение марки, освещаемой светодиодом, на чувствительной поверхности анализатора, изображения, в качестве которого применен многоэлементный приемник - фоточувствительный прибор с зарядовой связью (ПЗС). Величина смещения изображения марки пропорциональна углу
поворота зеркала. Реализация в ПЗС электронного сканирования позволяет обеспечить измерение угла и дискретизацию измеряемого углового интервала по параметрам видеосигнала, получаемого от
ПЗС(номера элемента в строке, засвеченного изображением марки).
Существенными недостатками прототипа являются ограниченный угловым полем коллиматора (обычно составляющим не более десятков угловых минут) диапазон измеряемых углов сканирующего зеркала, недостаточное число точек дискретизации углового интервала N (ограничено числом элементов многоэлементного фотоприемника п) и невозможность дискретизации последнего на произвольное заданное число значений N.
Целью изобретения является разработка измерителя углового положения сканирующего зеркала с увеличенным диапазоном измеряемых углов 2 р0 , повышенная информативность за счет увеличения числа то- чек дискретизации N и возможности обеспечения наперед заданного числа N,
большего числа элементов приемника п.
Цель достигается выполнением бтража- теля в виде симметричной системы к плоских зеркал с образующей, параллельной оси колебаний сканирующего зеркала, причем угол между смежными гранями у отражателя в плоскости, перпендикулярной оси колебаний, определяют из соотношения:
и введением второго отражателя, установленного на сканирующем зеркале под углом к оси колебаний, и жестко связанной с ним диафрагмы и второго приемника.
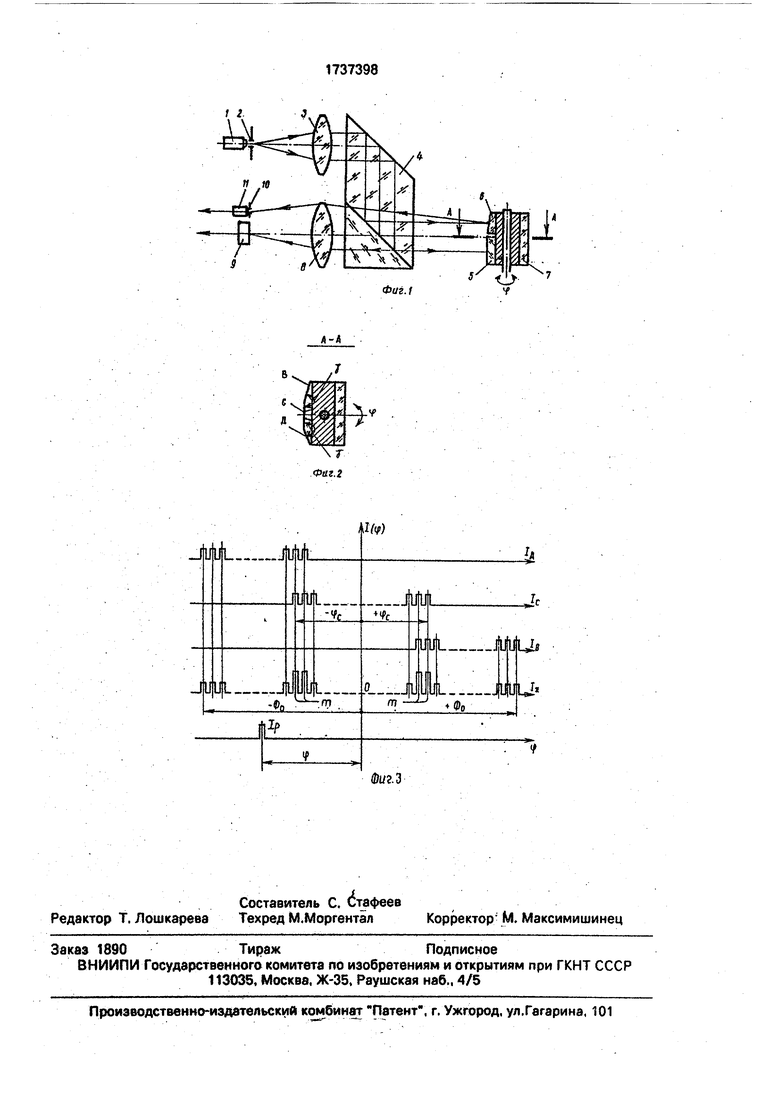
На фиг. 1 приведена принципиальная схема измерителя углового положения сканирующего зеркала; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - приведена угловая диаграмма импульсов для к 3.
Измеритель содержит источник 1 излучения, марку 2, объектив коллиматора 3,
призму 4 совмещения каналов, узел отражателя, состоящий из к-гранного отражателя 5 и отражателя 6 реперного канала, сканирующего зеркала 7, приемного объектива 8,
многоэлементного фотоприемника 9, щели 10 и фотоприемника 11 реперного канала. Изображение марки 2 сопряжено с чувствительной поверхностью многоэлементного фотоприемника 9 и щелью 10. На фиг. 2 представлена конфигурация отражателя при К 3: три зеркальные поверхности В, С и D составляют попарно плоские углы у с образующей, параллельной оси сканирующего зеркала.
Принцип действия измерителя состоит в освещении с помощью источника 1 и марки 2 объектива коллиматора 3. формирующего параллельный пучок лучей, который с помощью призмы 4 направляется на основной 5 и дополнительный б отражатели. Отраженное излучение с помощью приемного объектива 8 фокусируется на чувствительной площадке фотоприемника 9 и щели 10 соответственно. При колебаниях сканирующего зеркала 7 по углу tp излучение, отражаясь от каждого из зеркал k-гранного отражателя и попадая на фотоприемник 9, формирует k последовательностей импульсов с возможным частичным наложением импульсов. Угловая диаграмма для k 3 приведена на фиг. 3, где представлены три последовательности ID, lc и Гв, сформированные гранями В, С и D соответственно, а также суммарная последовательность им- .пульсов и реперный импульс 1р. Зеркальные грани -В и D наклонены относительно грани С на угол у , в результате чего последовательности 1в и ID сдвинуты относительно симметричной последовательности 1с в разные стороны. Число импульсов во всех трех последовательностях п соответствует числу чувствительных элементов многоэлементного фотоприемника 9. Для сохранения симметрии углового диапазона и обеспечения решения поставленной цели углы должны быть рассчитаны таким образом, чтобы обеспечить попарное наложение импульсов (1в; 1с и Ic; ID).
Предлагаемое устройство было использовано в качестве датчика угла строчной развертки в лазерном сканирующем микроскопе (ЛСМ), сопряженном с устройством накопления, обработки и отображения информации 15ИЭ100хЮО-011, имеющем число элементов в строке N 256 и угол отклонения сканирующего зеркала 2 фо 6°.
Использовавшийся в ЛСМ ранее авто- коллимационный датчик (АКД) не позволял решить задачу измерения положения сканирующего зеркала:
1.Диапазон углов АКД составлял при допустимой дисторсии порядка 2 ро&3°,
что вдвое меньше требуемого;
2.Технологически могла быть обеспечена реализация в АКД многоэлементного приемника, выполненного в виде фотодиода со штриховой маской, с числом элементов не более пмакс 140...150. Реализация предлагаемого устройства позволила при двухзеркальном отражателе (k 2) и двух наложенных импульсах (т 2) обеспечить
требуемое число точек дискретизации N 256 при значении п 129. При этом вдвое увеличился диапазон измеряемых углов 2 , что позволило решить задачу согласования строчной развертки ЛСМ с системой цифровой обработки изображения. Угол между зеркалами отражателя составил у 1,969, ро 2.95°.
Формула изобретения Измеритель углового положения сканирующего зеркала, содержащий два канала, в первом из которых размещены источник излучения, марка, установленная в фокальной плоскости объектива, во втором канале - второй объектив и многоэлементный приемник, призма совмещения каналов и отражатель, установленный на сканирующем зеркале и жестко связанный с ним, о т- личающийся тем, что, с целью увеличения диапазона измеряемых углов 2 ро и
повышения информативности за счет увеличения числа точек дискретизации углового положения зеркала N и обеспечения возможности дискретизации на любое заданное число значений N, большее числа
элементов приемника п, отражатель выполнен в виде симметричной системы К плоских зеркал с образующей, параллельной оси колебаний сканирующего зеркала, причем угол между смежными гранями отражателя в плоскости, перпендикулярной оси колеба- ний, удовлетворяет соотношению
(JЈlЈ-1) .и введены
второй отражатель, установленный на ска- нирующем зеркале под углом к оси колебаний и жестко связанный с ним, диафрагма и второй приемник.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угла скручивания | 1990 |
|
SU1776989A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ИЗОБРАЖЕНИЯ МАРКИ В ЦИФРОВЫХ АВТОКОЛЛИМАТОРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773278C1 |
| ИНТЕРФЕРЕНЦИОННЫЙ СПОСОБ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ОБЪЕКТА | 1998 |
|
RU2166182C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПОВОРОТА ОБЪЕКТА И ДВУХКООРДИНАТНЫЙ АВТОКОЛЛИМАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2024 |
|
RU2828450C1 |
| ИЗМЕРИТЕЛЬ УГЛОВ (ВАРИАНТЫ) | 1994 |
|
RU2116618C1 |
| Углоизмерительный прибор | 2019 |
|
RU2713991C1 |
| КЕРАТОМЕТР | 1994 |
|
RU2068674C1 |
| СПОСОБ КАЛИБРОВКИ ОПТИКО-ЭЛЕКТРОННОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2635336C2 |
| ОПТИЧЕСКАЯ СИСТЕМА ЗОННОГО СКАНИРОВАНИЯ | 1998 |
|
RU2147762C1 |
| Углоизмерительный прибор | 2018 |
|
RU2682842C1 |
Использование: измерительные приборы для измерения углового положения объекта, колеблющегося вокруг неподвижной оси; оптико-электронные приборы с зеркальными сканерами. Сущность изобретения: устройство содержит отражатель, выполненный в виде симметричной k-зер калькой системы, образующая которой параллельна оси колебаний, реперный канал, состоящий из дополнительного отражателя, диафрагмы, точечного приемника. Устройство решает задачу согласования требуемого числа точек дискретизации N с числом элементов п стандартного многоэлементного приемника при N п. 3 ил. сл С
