Изобретение относится к аналоговой вычислительной технике и может быть использовано при построении систем автоматического регулирования и при их моделировании.
Цель изобретения - расширение области применения за счет упрощения настройки независимо отображенных параметров передаточной функции.
Поставленная цель достигается за счет введения дополнительных элементов, в том числе блоков настраиваемого коэффициента, изменении и введения новых связей между элементами, нового распределения блоков настраиваемого коэффициента в путях прямой и обратной передачи сигнала.
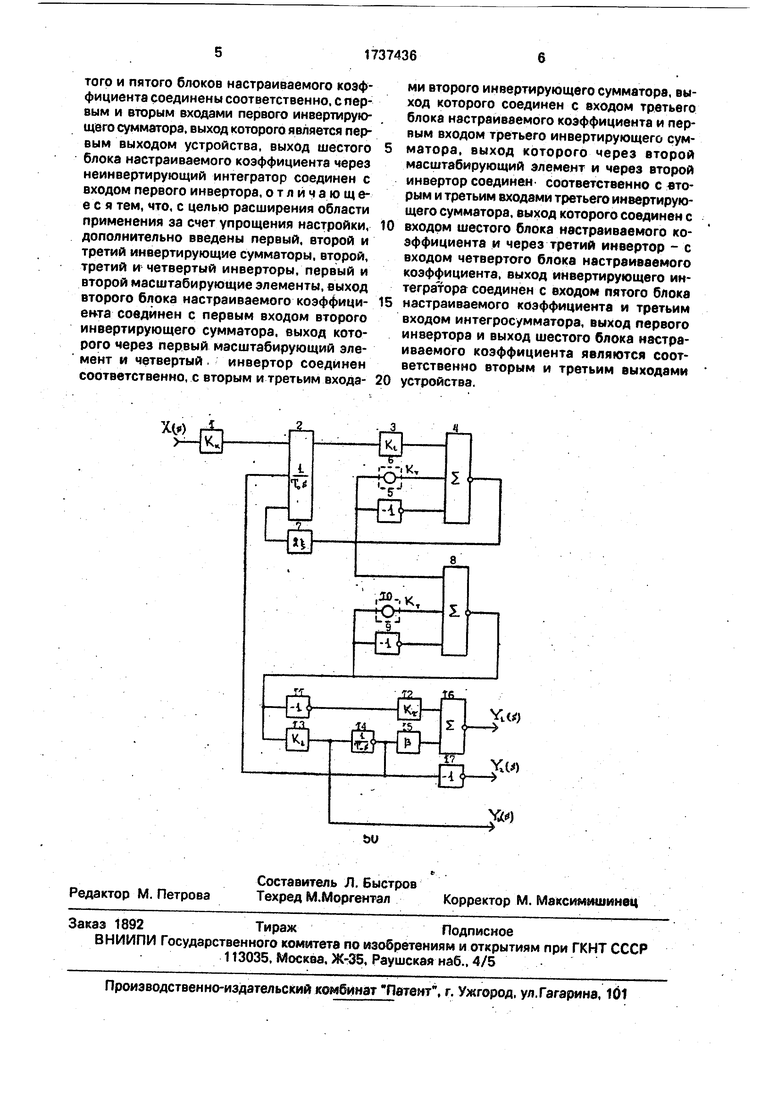
На чертеже приведена структурная схема предлагаемого устройства, реализованная на операционных усилителях.,
Схема состоит из первого 1, второго 3, третьего 7, четвертого 12, пятого 15 и шестого 13 блоков настраиваемого коэффициента соответственно Kk, Kt, 2 |, Кг. / и Kt, интегросумматора 2, первого 16, второго 4 и третьего 8 инвертирующих сумматоров, первого 17, второго 9, третьего 11 и четвертого 5 инверторов, инвертирующего интегратора 14, первого б и второго 10 масштабирующих элементов для отображения параметра Т.
В статическом состоянии вход устройства соединен с входом первого блока 1 настраиваемого коэффициента, выход которого соединен с первым входом инте г- росумматора 2, неинвертирующий выход которого соединен с первым входом второго инвертирующего сумматора 4. Выход последнего соединен через первый масштабирующий элемент 6 и четвертый инвертор 5
О
«А
соответственно с вторым и третьим входами второго инвертирующего сумматора 4, а также через третий блок 7 настраиваемого коэффициента с вторым входом интегросумматора 2 непосредственно с первым входом третьего инвертирующего сумматора 8. Выход последнего соединен через второй масштабирующий элемент 10 и через второй инвертор 9 соответственно с вторым и третьим входами третьего инвертирующего сумматора 8, а также непосредственно с входами третьего инвертора 11 и шестого блока 13 настраиваемого коэффициента. Выход третьего инвертора 11 соединен через четвертый блок 12 настраиваемого коэффициента с первым входом первого инвертирующего сумматора 16, выход которого является первым выходом устройства. Выход шестого блока 13 настраиваемого коэффициента является третьим выходом устройства и соединен с входом инвертирующего интегратора 14, выход которого соединен с третьим входом интегро- сумматора 2, через пятый блок 15 настраиваемого коэффициента - с вторым входом первого интегрирующего сумматора 16 и через первый инвертор 17 - с вторым выходом устройства.
Устройство работает следующим образом.
Входной сигнал устройства обозначен через X(S) {в дальнейшем рассматриваются- сигналы, отображенные по методу Лапласа).
На выходах устройства имеются соответственно сигналы: первого - Yi(S); второго - Vz(S); третьего - Ya(S). В исходном состоянии входной сигнал отсутствует, а напряжение на выходах каждого интегратора в соответствии с нулевыми начальными условиями равно нулю, напряжения на выходах всех блоков настраиваемого коэффициента и операционных усилителей равны нулю, следовательно, сигналы на выходах устройства отсутствуют. При прохождении входного сигнала через блок 1 настраиваемого коэффициента формируется сигнал
вида Xi(S)e (S). С выхода интегросумма1тора 2 имеем сигнал вида X2(S) X2(S) +
Ow
+Хт(8) + Xi4S)J. После прохождения второго блока 3 настраиваемого коэффициента сигнал принимает вид Хз(8) Kt 4X2(S}. С выхода второго инвертирующего сумматора 4 имеем сигнал вида X4(S) e (8) +КтХ4(8) - X$(S)J. После прохождения третьего блока 7 настраиваемого коэффициента сигнал принимает вид Хт{5) 21 ). С выхода третьего инвертирующего сумматора 8 имеем сигнал вида Xe(S) - -(X4(S) + +КтХ8(5) - Хв{8). После прохождения третьего инвертора 11 и четвертого блока 12 настраиваемого коэффициента сигнал принимает
вид Xi2(S) ). После прохождения шестого блока 13 настраиваемого коэффициента сигнал принимает вид Xi3(S) Kt Xe(S). Этот сигнал является выходным сигналом Ys(S)no третьему еыходу устройства,
0 т.е. Ys(S) Kt Xe(S). С выхода инвертирующего
интегратора 14 имеем сигнал вида Xi4(S) - j
-+ - Xis(S), тогда на втором выходе, устрой- оЬ
ства имеем сигнал вида Y2(S) (S)
5 1
- g Xia(S)t а после прохождения пятого
I оЬ
блока 15 настраиваемого коэффициента сигнал принимает )1 /5Xi4(S). На выходе первого инвертирующего суммато- 0 ра 16 имеем сигнал вида Xie(S) Yi(S) (S) + Xi5(S)3.
После математических преобразований получаем:
X(S):
X(S):
ЪЮ-Ъ-
КЦЈ52+2 5 + 1
Y2(S)
KToS-f/
Yi (S) Kk -2-5И. x (S).
KfTS e2 , 9 t KtTo q , 1.
tfrb
if T
Введя обозначения ° r. ,
Kt
KTTo Kt
T, I - , Kk К, получаем по первому выходу передаточную функцию заданного вида Wi(S) К .
T2S2+2 TS + 1
Формул а. и.3йбретения Устройство для моделирования линейных динамических звеньев с передаточной
функцией W(S)- К , соГ82 +2|TS + 1
держащее первый блок настраиваемого коэффициента, вхоД которого является входом устройства, а выход соединен с
первым входом интегросумматора, неинвертирующий выход которого соединен с вторым блоком настраиваемого коэффициента, выход третьего блока настраиваемого коэффициента соединен с вторым входом интегросумматора. выходы четвертого и пятого блоков настраиваемого коэффициента соединены соответственно, с первым и вторым входами первого инвертирующего сумматора, выход которого является первым выходом устройства, выход шестого блока настраиваемого коэффициента через неинвертирующий интегратор соединен с входом первого инвертора, отличающееся тем, что, с целью расширения области применения за счет упрощения настройки, дополнительно введены первый, второй и третий инвертирующие сумматоры, второй, третий и четвертый инверторы, первый и второй масштабирующие элементы, выход второго блока настраиваемого коэффици- ента соединен с первым входом второго инвертирующего сумматора, выход которого через первый масштабирующий элемент и четвертый . инвертор соединен соответственно, с вторым и третьим входа-
ми второго инвертирующего сумматора, выход которого соединен с входом третьего блока настраиваемого коэффициента и первым входом третьего инвертирующего сумматора, выход которого через второй масштабирующий элемент и через второй инвертор соединен- соответственно с вторым и третьим входами третьего инвертирующего сумматора, выход которого соединен с входом шестого блока настраиваемого коэффициента и через третий инвертор - с входом четвертого блока настраиваемого коэффициента, выход инвертирующего интегратора соединен с входом пятого блока настраиваемого коэффициента и третьим входом интегрос/мматора, выход первого инвертора и выход шестого блока настраиваемого коэффициента являются соответственно вторым и третьим выходами устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ОДНООСНОГО СИЛОВОГО СТАБИЛИЗАТОРА | 1989 |
|
RU2022362C1 |
| Импульсное регулирующее устройство | 1985 |
|
SU1267358A1 |
| Корреляционное устройство для определения запаздывания случайного сигнала | 1982 |
|
SU1062727A1 |
| ОГРАНИЧИТЕЛЬ ПРЕДЕЛЬНЫХ РЕЖИМОВ ПОЛЕТА МАНЕВРЕННОГО САМОЛЕТА ПО ПЕРЕГРУЗКЕ | 2019 |
|
RU2711040C1 |
| Активный перестраиваемый фильтр второго порядка | 1989 |
|
SU1758833A1 |
| Устройство для моделирования диаграммы циклического деформирования | 1989 |
|
SU1803922A1 |
| Устройство для моделирования жесткой фрикционной муфты | 1990 |
|
SU1817112A1 |
| Адаптивный прогнозатор | 1982 |
|
SU1049866A1 |
| Устройство для регулирования силовых параметров и рабочей подачи процесса резания | 1985 |
|
SU1270744A1 |
| Устройство для моделирования реологических характеристик материала | 1988 |
|
SU1755301A1 |
Изобретение относится к аналоговой вычислительной технике и может быть использовано при построении систем автоматического регулирования и их моделировании. Устройство содержит три инвертирующих сумматора, шесть блоков настраиваемого коэффициента, два инвертора, два масштабирующих элемента, инвертирующий интегратор и интегросумматор. Сущность изобретения заключается в выборе структуры устройства, позволяющей обеспечить раздельную регулировку коэффициентов передаточной функции, изменение масштаба и знака времени. 1 ил.
| Тетельбаум И.М., Шнейдер Ю.Р | |||
| Практика аналогового моделирования динамических систем | |||
| М.: Энергоатомиздат, 1987, с | |||
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
| Горбацевич Е.Д., Левинзон Ф.Ф | |||
| Аналоговое моделирование систем управления, С., 1984, с | |||
| Катодное реле | 1918 |
|
SU159A1 |
