Изобретение относится к аналоговой вычислительной технике и может быть использовано в специализированных аналоговых и гибридных выпрямительных устройствах, а также в системах автоматизированного проектирования гироскопических систем.
Известны устройства для моделирования одноосного силового стабилизатора, например, по структурной схеме одноосного гиростабилизатора [1], в состав которой входят два динамических звена, в качестве которых использованы два типа апериодических звеньев с передаточными функциями ненормированного вида, три масштабирующих усилителя, два интегратора и два сумматора.
Данная схема не позволяет производить полную аналогию параметров с физическими параметрами одноосного силового стабилизатора, а также независимый анализ влияния изменения параметров на динамические свойства одноосного гиростабилизатора как объекта исследования.
В качестве прототипа принято устройство, реализующее схему набора для одноосного силового стабилизатора [2], содержащее колебательное, интегрирующее и апериодическое звенья, выполненные на инвертирующем интегросумматоре, двух инвертирующих сумматорах, трех инвертирующих интеграторах, инвертирующем усилителе. При моделировании должны быть известны величины
K*=  ; Тдг* = mtТдг; Ту* = mtTу; Т* = =mtT, (В/H), где mt - масштаб времени; К = k1 ˙k2 ˙k3 ˙n H-1 - коэффициент усиления разомкнутой системы; Тдг = n2 ˙sBH-2 - постоянная времени двигателя совместно с гироскопом; T= H
; Тдг* = mtТдг; Ту* = mtTу; Т* = =mtT, (В/H), где mt - масштаб времени; К = k1 ˙k2 ˙k3 ˙n H-1 - коэффициент усиления разомкнутой системы; Тдг = n2 ˙sBH-2 - постоянная времени двигателя совместно с гироскопом; T= H -величина, обратная угловой частоте свободных (нутационных) колебаний гиростабилизатора; Ту - постоянная времени усилителя; В - момент инерции гироскопа относительно оси прецессии; А - суммарный момент инерции платформы относительно оси стабилизации; Н - кинетический момент; n - передаточное отношение редуктора; k1 - коэффициент передачи датчика угла прецессии; k2 - коэффициент усиления усилителя; k3 - коэффициент передачи двигателя по моменту; s - коэффициент скоростного сопротивления двигателя. Вход схемы соединен через инвертирующий усилитель с первым входом первого инвертирующего сумматора и с входом первого инвертирующего сумматора и с входом нелинейного элемента, выход которого соединен с третьим входом первого инвертирующего сумматора, выход которого соединен с первым входом второго инвертирующего сумматора, выход которого соединен с первым входом первого инвертирующего интегросумматора, выход которого соединен со своим вторым входом и с входом нелинейного элемента и входом второго инвертирующего интегратора, выход которого является выходом схемы и соединен с вторым входом второго инвертирующего сумматора и с входом третьего инвертирующего интегратора, выход которого соединен с первым входом второго инвертирующего интегросумматора, выход которого соединен со своим вторым входом и с третьим входом второго инвертирующего сумматора.
-величина, обратная угловой частоте свободных (нутационных) колебаний гиростабилизатора; Ту - постоянная времени усилителя; В - момент инерции гироскопа относительно оси прецессии; А - суммарный момент инерции платформы относительно оси стабилизации; Н - кинетический момент; n - передаточное отношение редуктора; k1 - коэффициент передачи датчика угла прецессии; k2 - коэффициент усиления усилителя; k3 - коэффициент передачи двигателя по моменту; s - коэффициент скоростного сопротивления двигателя. Вход схемы соединен через инвертирующий усилитель с первым входом первого инвертирующего сумматора и с входом первого инвертирующего сумматора и с входом нелинейного элемента, выход которого соединен с третьим входом первого инвертирующего сумматора, выход которого соединен с первым входом второго инвертирующего сумматора, выход которого соединен с первым входом первого инвертирующего интегросумматора, выход которого соединен со своим вторым входом и с входом нелинейного элемента и входом второго инвертирующего интегратора, выход которого является выходом схемы и соединен с вторым входом второго инвертирующего сумматора и с входом третьего инвертирующего интегратора, выход которого соединен с первым входом второго инвертирующего интегросумматора, выход которого соединен со своим вторым входом и с третьим входом второго инвертирующего сумматора.
Основным недостатком прототипа является то, что указанные выше величины при моделировании должны быть известны заранее, т.е. вычислены по соответствующим формулам по заданным параметрам одноосного силового стабилизатора, и при необходимости изменить один из этих параметров требуется производить вычисления и настраивать соответствующие делители напряжения, например при изменении модуля кинетического момента Н вычисляют значения четырех величин схемы набора и изменяют положения токосъемов четырех делителей напряжения, причем по различным, сложным функциональным зависимостям.
Целью изобретения является расширение области применения устройства путем обеспечения наблюдаемости полного вектора состояния и независимой настройки и перестройки параметров одноосного силового стабилизатора.
Цель достигается благодаря техническому решению, содержащему также существенные признаки, как элементный состав, связи между элементами и распределение регулирующих органов в путях и контурах схемы.
Структурная схема предлагаемого устройства приведена на чертеже и содержит инвертирующий интегросумматор 1, первый 2, второй 6 и третий 9 инвертирующие сумматоры, первый 3, второй 7 и третий 10 инвертирующие усилители, первый 4, второй 8 и третий 11 инвертирующие интеграторы, первый 5 и второй 12 инверторы. Устройство имеет два входа, первый из которых отображает величину возмущающего момента Мв, а второй - величину угла поворота подвижного основания αосн. Наличие четырех выходов позволяет обеспечить наблюдаемость полного вектора состояния: первый выход отображает угловую скорость ухода стабилизатора  , второй выход - угол ухода стабилизатора α, , третий выход - угловую скорость поворота стабилизатора
, второй выход - угол ухода стабилизатора α, , третий выход - угловую скорость поворота стабилизатора  , четвертый выход - угол поворота стабилизатора β . Первый инвертирующий усилитель отображает величину, обратную моменту инерции В, второй инвертирующий усилитель отображает коэффициент усиления цепи коррекции Кк, третий инвертирующий усилитель отображает величину, обратную моменту инерции А, первый вход первого инвертирующего сумматора и второй вход третьего инвертирующего сумматора отображают величину кинематического момента Н, первый вход инвертирующего интегросумматора отображает величину коэффициента усиления цепи стабилизации Кс.
, четвертый выход - угол поворота стабилизатора β . Первый инвертирующий усилитель отображает величину, обратную моменту инерции В, второй инвертирующий усилитель отображает коэффициент усиления цепи коррекции Кк, третий инвертирующий усилитель отображает величину, обратную моменту инерции А, первый вход первого инвертирующего сумматора и второй вход третьего инвертирующего сумматора отображают величину кинематического момента Н, первый вход инвертирующего интегросумматора отображает величину коэффициента усиления цепи стабилизации Кс.
В статическом состоянии первый вход устройства по возмущающему моменту Мв подключен к второму входу инвертирующего интегросумматора 1, выход которого подключен к второму входу первого инвертирующего сумматора 2. Выход сумматора 2 подключен к входу первого инвертирующего усилителя 3, выход которого является выходом устройства по угловой скорости ухода стабилизатора  и подключен к входу первого инвертирующего интегратора 4. Выход интегратора 4 подключен к входу первого инвертора 5, выход которого является выходом устройства по углу ухода стабилизатора α и подключен к второму входу третьего инвертирующего сумматора 9. Выход первого инвертирующего интегратора 4 также подключен к первому входу второго инвертирующего сумматора 6, второй вход которого является входом устройства по углу поворота подвижного основания αосн, а выход подключен к входу второго инвертирующего интегратора 8, выход которого подключен к первому входу третьего инвертирующего сумматора 9. Выход сумматора 9 подключен к входу третьего инвертирующего усилителя 10, выход которого является выходом устройства по угловой скорости поворота стабилизатора
и подключен к входу первого инвертирующего интегратора 4. Выход интегратора 4 подключен к входу первого инвертора 5, выход которого является выходом устройства по углу ухода стабилизатора α и подключен к второму входу третьего инвертирующего сумматора 9. Выход первого инвертирующего интегратора 4 также подключен к первому входу второго инвертирующего сумматора 6, второй вход которого является входом устройства по углу поворота подвижного основания αосн, а выход подключен к входу второго инвертирующего интегратора 8, выход которого подключен к первому входу третьего инвертирующего сумматора 9. Выход сумматора 9 подключен к входу третьего инвертирующего усилителя 10, выход которого является выходом устройства по угловой скорости поворота стабилизатора  и подключен к входу третьего инвертирующего интегратора 11. Выход интегратора 11 подключен к первому входу первого инвертирующего сумматора 2 и к входу второго инвертора 12, выход которого подключен к первому входу инвертирующего интегросумматора 1 и является выходом устройства по углу поворота стабилизатора β .
и подключен к входу третьего инвертирующего интегратора 11. Выход интегратора 11 подключен к первому входу первого инвертирующего сумматора 2 и к входу второго инвертора 12, выход которого подключен к первому входу инвертирующего интегросумматора 1 и является выходом устройства по углу поворота стабилизатора β .
Пусть на входах устройства действуют входные сигналы Мв(s) и αосн(s) (в дальнейшем рассматривают сигналы, преобразованные в соответствии с преобразованием Лапласа). На выходе инвертирующего интегросумматора 1 формируется сигнал вида
X1(s)= -  [Kсβ(s)+Mв(s)]
[Kсβ(s)+Mв(s)]
На выходе первого инвертирующего сумматора 2 формируется сигнал вида
X2(s) = - [Hs β(s) + X1(s)].
На выходе первого инвертирующего усилителя 3 формируется сигнал вида
X3(s)= -  X2(s)=sα(s)
X2(s)=sα(s)
На выходе первого инвертирующего интегратора 4 формируется сигнал вида
X4(s)= -  X3(s)
X3(s)
На выходе первого инвертора 5 формируется сигнал вида
X5(s) = -X4(s) = α(s).
На выходе второго инвертирующего сумматора 6 формируется сигнал вида
X6(s) = -[ αосн(s) - α (s)].
На выходе второго инвертирующего усилителя 7 формируется сигнал вида
X7(s) = -KкX6(s).
На выходе второго инвертирующего интегратора 8 формируется сигнал вида
X8(s)= -  X7(s)
X7(s)
На выходе третьего инвертирующего сумматора 9 формируется сигнал вида
X9(s) = -[X8(s) + HX5(s)].
На выходе третьего инвертирующего усилителя 10 формируется сигнал вида
X10(s)= -  X9(s)=sβ(s)
X9(s)=sβ(s)
На выходе третьего инвертирующего интегратора 11 формируется сигнал вида
X11(s)= -  X10(s)
X10(s)
На выходе второго инвертора 12 формируется сигнал вида
X12(s) = -X11(s) = β (s).
Учитывая связи между элементами и произведя необходимые математические (s) =
(s) =  Mв(s)
Mв(s) (s) =
(s) =  Mв(s)
Mв(s)
α(s) =  (s)
(s)
β(s)=
Следовательно, предлагаемое устройство отображает динамику одноосного силового стабилизатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования линейных динамических звеньев с передаточной функцией | 1989 |
|
SU1737436A1 |
| ОДНООСНЫЙ ГИРОСТАБИЛИЗАТОР | 1991 |
|
RU2011171C1 |
| СГЛАЖИВАЮЩИЙ ФИЛЬТР | 1991 |
|
RU2019026C1 |
| Одноосный гиростабилизатор | 1990 |
|
SU1779930A1 |
| Устройство для моделирования передаточной функции вида @ | 1987 |
|
SU1553953A1 |
| Активный перестраиваемый фильтр второго порядка | 1989 |
|
SU1758833A1 |
| Устройство для моделирования структурно-компенсированного фильтра с передаточной функцией F(р) = @ | 1990 |
|
SU1714628A1 |
| Устройство для моделирования колебательного звена | 1987 |
|
SU1476499A1 |
| Активный перестраиваемый режекторный фильтр | 1989 |
|
SU1739479A1 |
| Устройство для моделирования неминимально-фазового звена с передаточной функцией @ | 1987 |
|
SU1451641A1 |
Устройство для моделирования одноосного силового стабилизатора относится к аналоговой вычислительной технике и может быть использовано в специализированных аналоговых и гибридных вычислительных устройствах, а также в системах автоматизированного проектирования гироскопических систем. Цель изобретения - расширение области применения путем обеспечения наблюдаемости полного вектора состояния и независимой настройки параметров. Цель достигается за счет того, что устройство содержит инвертирующий интегросумматор 1, три инвертирующих сумматора 2, 6 и 9, три инвертирующих усилителя 3, 7 и 10, три инвертирующих интегратора 4, 8 и 11, два инвертора 5 и 12. 1 ил.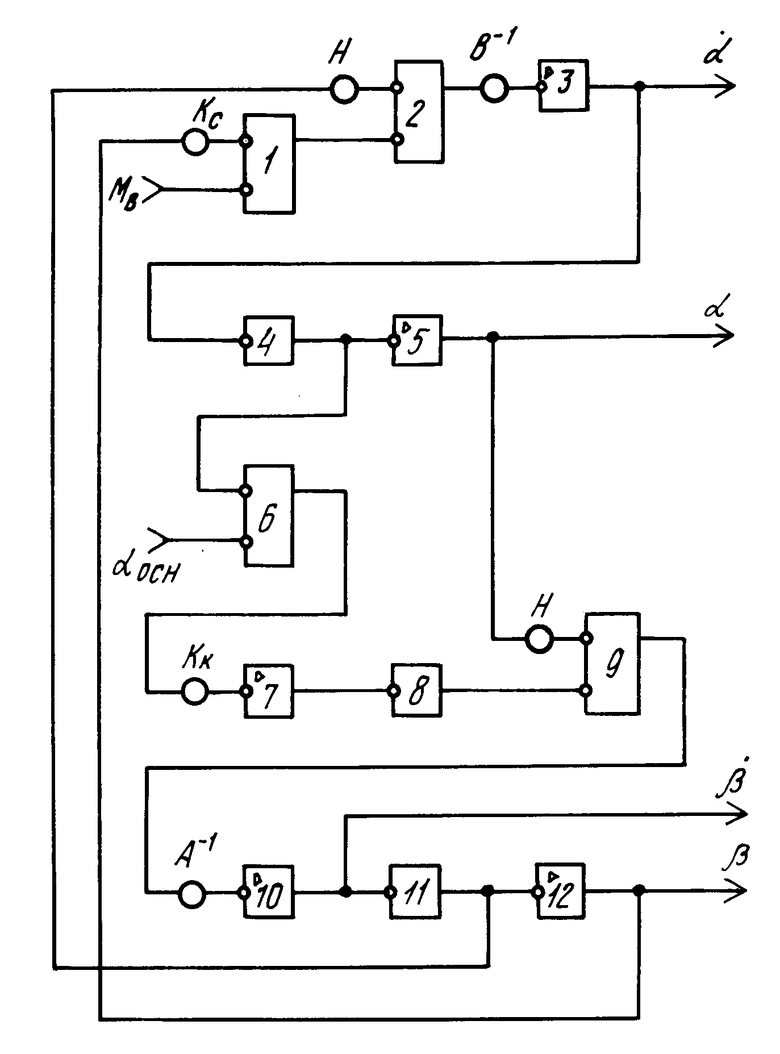
УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ОДНООСНОГО СИЛОВОГО СТАБИЛИЗАТОРА, содержащее инвертирующий интегросумматор, первый и второй инвертирующие сумматоры, первый, второй и третий инвертирующие интеграторы, первый инвертирующий усилитель, отличающееся тем, что, с целью расширения области применения путем обеспечения наблюдаемости полного вектора состояния и независимой настройки параметров, дополнительно введены второй и третий инвертирующие усилители, первый и второй инверторы, третий инвертирующий сумматор, первый вход которого подключен к выходу второго инвертирующего интегратора, второй вход подключен к выходу первого инвертора, являющегося выходом устройства по углу ухода стабилизатора, а выход подключен к входу третьего инвертирующего усилителя, выход которого является выходом устройства по угловой скорости поворота стабилизатора и подключен к входу третьего инвертирующего интегратора, выход которого подключен к первому входу первого инвертирующего сумматора и к входу второго инвертора, выход которого является выходом устройства по углу поворота стабилизатора и подключен к первому входу инвертирующего интегросумматора, второй вход которого является входом устройства по возмущающему моменту, а выход подключен к второму входу первого инвертирующего сумматора, выход которого подключен к входу первого инвертирующего усилителя, выход которого является выходом устройства по угловой скорости ухода стабилизатора и подключен к входу первого инвертирующего интегратора, выход которого подключен к входу первого инвертора и к первому входу второго инвертирующего сумматора, второй вход которого является входом устройства по углу поворота подвижного основания, а выход подключен к входу второго инвертирующего усилителя, выход которого подключен к входу второго инвертирующего интегратора.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Каргу Л.И | |||
| Измерительные устройства летательных аппаратов | |||
| М.: Машиностроение, 1988, с.92, рис.6.16. | |||
