Изобретение относится, к аналоговой вычислительной технике и предназначено для использования при моделировании динамических систем с фрикционными связями,особенно прецизионных электромеханических систем.
Цель изобретения - повышение точности моделирования процесса буксования за счет воспроизведения на модели режимов и условий адекватных тем, что имеют место в реальных жестких фрикционных муфтах.
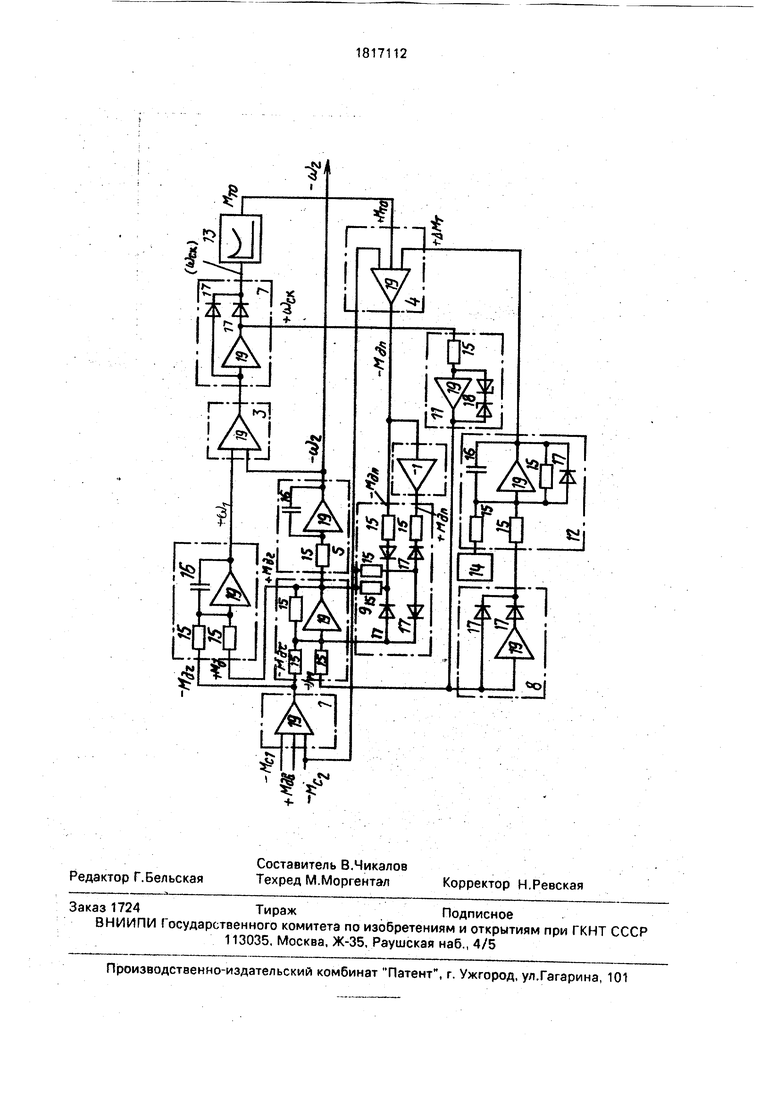
На чертеже представлена принципиальная схема устройства.
Устройство для моделирования жесткой фрикционной муфты содержит третий 1, четвертый 2, первый 3 и второй 4 сумматоры, интегратор 5 и интегросумматор 6, первый 7 и второй 8 блоки выделения модуля, блок нелинейности типа ограничение насыщения 9, инвертор 10, релейный элемент 11, апериодическое звено 12, блок преобразования частоты скольжения в момент трения
13 и источник постоянного напряжения 14, резисторы 15, конденсаторы 16, диоды 17, стабилитроны 18, усилители 19.
Три входа третьего сумматора 1 являются входами устройства. На первый из них, соединенный со вторым входом второго сумматора 4, поступает задание момента сопротивления движению ведомой полумуфты, на второй - задание момента сопротивления движению ведущей полумуфты, а на третий - задание движущего момента устройства. Выход третьего сумматора подключен к первым входам четвертого сумматора 2 и интегросумматора 6. Четвертый сумматор 2 своим выходом соединен со входом интегратора 5, информационным входом блока нелинейности типа ограничение насыщения и вторым входом интегросумматора 6. Выход интегросумматора 5 является выходом напряжения, пропорционального частоте вращения ведомой полумуфты устройства и связан со вторым входом первого
00
VJ ю
сумматора 3. Второй вход последнего соединен с выходом интегросумматора 6. Выход первого сумматора 3 через первый блок выделения модуля 7 соединен со входом блока преобразования частоты скольжения в момент трения 13. Выход последнего подключен к первому входу второго сумматора 4, третий вход которого соединен с выходом апериодического звена 12. Выход второго сумматора 4 связан со входом инвертора 10 и пераым входом задания уровня ограничения блока нелинейности типа ограничение насыщения 9. Второй вход задания уровня ограничения последнего подключен к выходу инвертора 10. Выход блока нелинейности типа ограничение насыщения 9 соединен с третьим входом четвертого сумматора 2. Релейный элемент 11 своим входом подключен к инвертирующему выходу первого блока выделения модуля 7, а выходом - ко второму входу четвертого сумматора 2 и входу второго блока выделения модуля 8, который своим выходом соединен с первым входом апериодического звена 12. Ко второму входу последнего подключен источник постоянного напряжения 14,
Устройство моделирования жесткой фрикционной муфты работает следующим образом. В результате алгебраического суммирования входных напряжений устройст- ва, которые пропорциональны движущему моменту Мдв и моментам сопротивления движению ведущей МС1 и ведомой МС2 полумуфт, на выходе третьего сумматора 1 формируется напряжение пропорциональное суммарному динамическому моменту Мдл, которое поступает на первые входы интегросумматора 6, и четвертого сумматора 2. На выходе последнего формируется напряжение пропорциональное динамическому моменту Мд2, приложенному к ведомой пр- лумуфте устройства.
При нулевом выходном сигнале релейного элемента 11, что выполняется при условии равенства частот вращения ведущей а) и ведомой Уг полумуфт {режим отсутствия буксования), и величине сигнала Мда ниже предельного уровни МД2п, задаваемого блоком нелинейности типа ограничение насыщения, напряжение МД2 оказывается пропорциональным без искажений по- ступает на вход интегратора 5 и второй вход интегросумматора 6. После алгебраического суммирования на входе последнего сигналов Мд и Мд2 образуется величина пропорциональная динамическому моменту Мд1, приложенному к ведущей полумуфте. В результате интегрирования на выходе интегросумматора 6 формируется напряжение;пропорциональное частоте вращени. ведущей полумуфты .
Одновременно сигнал Мд2 обрабатывается интегратором 5, на выходе которого образуется напряжение,пропорциональное частоте вращения ведомой полумуфты tug.
Поскольку в рассматриваемой ситуации осуществляется линейное преобразование переменных, при надлежащем выборе коэффициентов передачи операционных блоков обеспечивается равенство напряжений toil и оЈ| , что соответствует режиму работы фрикционной муфты без буксования.
При увеличении напряжения задания движущего момента Мдв, подаваемого на третий вход третьего сумматора 1 „ естественно растет и МДЈ Это может привести к тому, что выходное напряжение МД2 четвертого сумматора 2 достигнет предельного уровня Мд2п, после чего дальнейший его рост становится невозможным (эта ситуация соответствует достижению предельного момента, обусловленного силами трения в реальном объекте). В результате нарушается пропорциональная связь между MAi и Мд2. Динамический момент МД1 начинает расти быстрее, чем Мд2 и, следовательно, toil превышает иц. Наступает режим буксования.
Благодаря суммированию разнополяр- ных сигналов w и - аь на входах первого сумматора 3, на его выходе формируется напряжение,пропорциональное частоте скольжения обеих полумуфт аь. Через первый блок выделения модуля 7 оно поступает на вход блока преобразования частоты скольжения 13 в момент трения МТо. Выходной сигнал последнего вторым сумматором 4 алгебраически суммируется с напряжениями .пропорциональными моменту сопротивления движению ведомой полумуфты МС2 и той части момента трения ДМт, которая зависит от продолжительности состояния относительного покоя обеих полумуфт. Таким образом на выходе второго сумматора 4 формируется напряжение пропорциональное предельному уровню МД2п. Это напряжение и обратное ему по знаку, получаемое на выходе инвертора 10 используется для задания уровня ограничения блока нелинейности типа ограничение насыщения, обеспечивая поддержание Мдг на уровне МД2п на протяжении всего интервала буксования.
С момента возникновения буксования сигнал uJtx, снимаемый с инвертирующего выхода первого блока выделения модуля 7, подается на вход релейного элемента 11. Возникающее при этом на выходе последнего напряжение UCM 0, поступает на второй вход четвертого сумматора 2 и обеспечивает удержание на его выходе напряжения Мд2 на уровне Мд2 МД2п до прекращения режима буксования, т.е. До тех пор, пока не будут выполнены условия
У1 Oi И Мд2 Мд2п.
Цепочка из второго блока выделения модуля 8, апериодического звена 12 и источника постоянного напряжения 14 обеспечивает формирование той части момента трения ЛМТ, которая зависит от времени относительного покоя полумуфт.
При отсутствии буксования за счет источника постоянного напряжения 14 на выходе апериодического звена устанавливается максимальное значение сигнала ДМТ. При возникновении буксования на выходе релейного элемента 11 появляется напряжение UCM 4 О, которое через второй блок выделения модуля 3 поступает на первый вход апериодического звена 12 и обеспечивает снижение уровня его выходного сигнала А Мт. С прекращением режима буксования выходной сигнал релейного элемента 11 становится равным нулю и напря- ж.ение ЛМТ восстанавливается до начального уровня.
Формула изобретения Устройство для моделирования жесткой фрикционной муфты, содержащее источник постоянного напряжения, интегратор, выход которого является выходом напряжения пропорционального частоте вращения ведомой полумуфты устройства, первый-чет- вертый сумматоры, инвертор, первый блок выделения модуля, блок нелинейности типа ограничение насыщения, релейный элемент, причем выход первого сумматора подключен к входу первого блока выделения модуля, выход второго сумматора соединен с первым входом задания уровня ограничения блока нелинейности типа ограничение
насыщения и входом инвертора, выход которого подключен к второму входу задания уровня ограничения блока нелинейности типа ограничение насыщения, о т л и ч аю щ е е с я тем, что, с целью повышения точности, в него введены интегросумматор, второй блок выделения модуля, апериодическое звено и блок преобразования частоты скольжения в момент трения, выход
которого подключен к первому входу второго сумматора, второй вход которого объединен с первым входом третьего сумматора и является входом задания момента сопротивления движению ведомой полумуфты устройства, второй вход третьего сумматора .является входом задания момента сопротивления движению ведущей полумуфты устройства, третий вход третьего сумматора - входом задания движущего момента устройства, выход третьего сумматора соеди-. нен с первыми входами четвертого сумматора и интегросумматора, выход которого подключен к первому входу первого сумматора, второй вход которого соединен
с выходом интегратора, инвертирующий выход первого блока выделения модуля подключен к входу релейного элемента, выход которого соединен с вторым входом четвер- того сумматора и входом второго блока выделения модуля, выход которого подключен к первому входу апериодического звена, выход которого соединен с третьим входом второго сумматора, выход источника постоянного напряжения подключен к второму
входу апериодического звена, выход четвертого сумматора соединен с входом интегратора, с вторым входом интегросумматора и с информационным входом блока нелинейности типа ограничение насыщения, выход которого подключен к третьему входу четвертого сумматора, выход первого блока выделения модуля соединен с входом блока преобразования частоты скольжения в момент трения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования привода конвейера | 1990 |
|
SU1762314A1 |
| Устройство для моделирования упруговязкой фрикционной пары | 1990 |
|
SU1780091A1 |
| КОМБИНИРОВАННАЯ СИСТЕМА КООРДИНАТНО-ПАРАМЕТРИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2004 |
|
RU2279116C2 |
| Импульсное регулирующее устройство | 1985 |
|
SU1267358A1 |
| Устройство для моделирования механической передачи | 1983 |
|
SU1180932A1 |
| Электропривод переменного тока | 1984 |
|
SU1515322A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| БЫСТРОДЕЙСТВУЮЩИЙ АДАПТИВНЫЙ РЕГУЛЯТОР ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЯ | 2015 |
|
RU2622183C2 |
| ЭЛЕКТРОПРИВОД С КООРДИНАТНО-ПАРАМЕТРИЧЕСКИМ УПРАВЛЕНИЕМ ПО ПРОИЗВОДНОЙ ТОКА | 2004 |
|
RU2261522C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2002 |
|
RU2230350C2 |
Изобретение относится к аналоговой вычислительной техни ке и предназначено для использования при моделировании динамических систем с фрикционными связями, особенно прецизионных электромеханических систем. Цель изобретения - повышение точности моделирования процесса буксования за счет воспроизведения на модели режимов и условий, адекватных тем, что имеют место в реальных жёстких фрикционных муфтах. Указанная цель достигается за счет выделения из суммарного динамического момента составляющих, воздействующих на ведущую и ведомую полумуфты устройства, с последующим ограничением последней на уровне, допустимом по условиям фрикционной связи между полумуфтами. 1 ил.
| Устройство для моделирования муфт трения | 1981 |
|
SU1003109A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
