Изобретение относится к машиностроению, в частности к средствам гидропневмоавтоматики, и может быть использовано в качестве исполнительного механизма для поворота манипуляторов грузоподъемных машин.
Цель изобретения - повышение надежности и точности позиционирования.
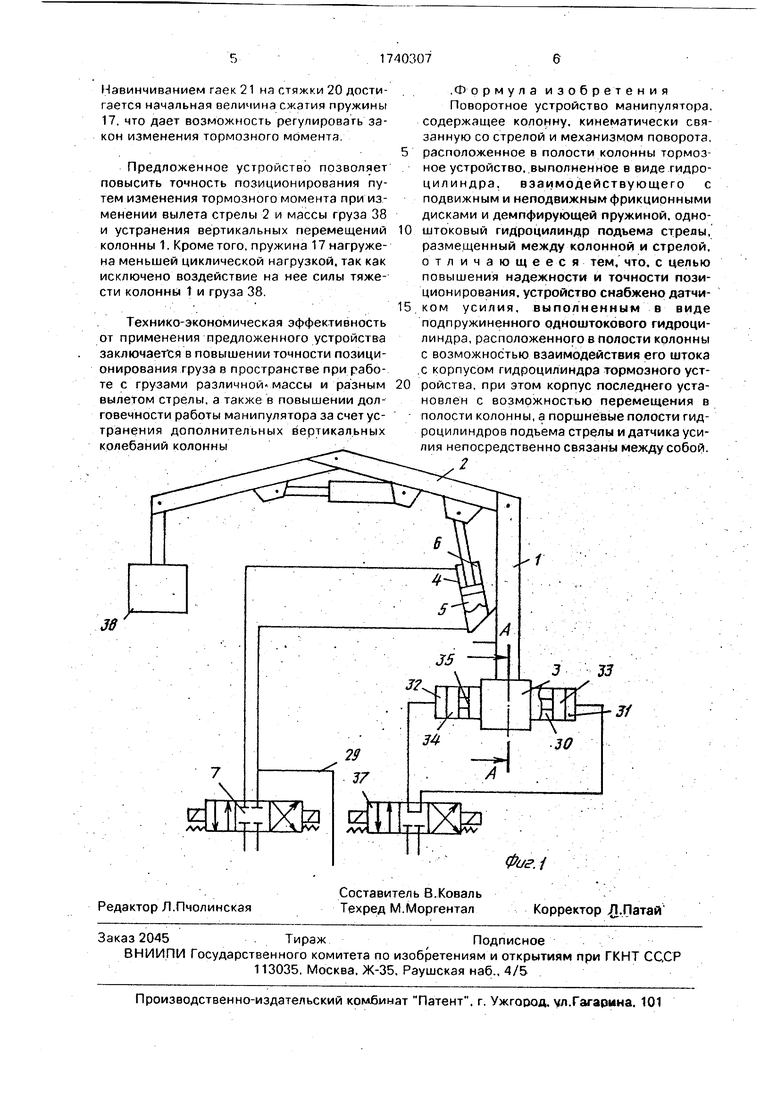
На фиг. 1 представлена принципиальная схема устройства: на фиг. 2 - разрез А-А фиг. 1 и схема подключения механизма поворота.
Поворотное устройство манипулятора содержит полую колонну 1, кинематически связанную со стрелкой 2 и механизмом 3 поворота, гидроцилиндр 4 подъема стрелы с поршневой 5 и штоковой 6 полостями, подключенными к трехпозиционному четырехлинейному распределителю 7, расположенное в полости 8 колонны 1 тормозное устройство, выполненное в виде гидроцилиндра 9 с поршневой 10 и штоковой 11 полостями, подключенными к двухпозици- онному четырехлинейному распределителю 12. Поршень 13 со штоком 14 гидроцилинд- ра 9 взаимодействуют с подвижным и неподвижным фрикционными дисками 15 и 16 и демпфирующей пружиной 17 посредством ползунов 18 и 19, связанных между собой стяжками 20 с гайками 21. Кроме того, уст- ройство снабжено датчиком усилия, выпол- ненным в виде подпружиненного одноштокового гидроцилиндра 22, расположенного в полости 8 колонны 1 с возможностью взаимодействия его штока 23 с корпусом 23 гидроцилиндра 9, установленным с возможностью перемещения в полости 8 колонны 1. В гидроцилиндре 22 установлен с образованием поршневой и штоковой полостей 25 и 26 поршень 27, свя- занный со штоком 23 и взаимодействующий с пружиной 28. Поршневые полости 5 и 25 гидроцилиндров 4, 22 непосредственно свя - заны между собой магистралью 29. Механизм 3 поворота состоит из гидроцилиндра 30 с расположенными в нем с образованием рабочих полостей 31 и 32 поршнями 33 и 34, Рейка 35 взаимодействует с колонной 1 посредством шестерни 36 Полости 31 и 32 гидроцилиндра 30 подключены к трехпози- ционному четырехлинейному распределителю 37. Стрела 2 манипулятора нагружена грузом 38.
Поворотное устройство работает следующим образом.
Колонна 1 поворачивается путем сообщения рабочих полостей 31 и 32 гидроцилиндра 30 механизма 3 поворота с магистралями высокого и низкого давления, вследствие переключения распределителя
37 в рабочие позиции. В нейтральной позиции распределителя 37 происходит остановка колонны 1.
При изменении массы груза 38 и вылета стрелы 2 происходит изменение момента инерции манипулятора, приведенного к механизму 3 поворота.следовательно, необходимо регулировать величину тормозного усилия между фрикционными дисками 15 и 16, что осуществляется по величине давления в поршневой полости 5 гидроцилиндра
4подъема стрелы 2, которая магистралью 20 связана с поршневой полостью 25 гидроцилиндра 22.
При увеличении вылета стрелы 2 и массы груза 28 возрастает давление в полостях
5и 25, вследствие чего поршень 27 сильнее сжимает пружину 28, перемещая корпус 24 гидроцилиндра 9, что приводит к уменьшению зазора между фрикционными дисками 15 и 16. При этом увеличивается тормозной элемент и обеспечивается стабильность величины позиционирования.
Торможение осуществляется следующим образом.
Распределитель 37 устанавливается в нейтральную позицию и колонна 1 свободно перемещается под действием сил инерции, поскольку полости 31 и 32 гидроцилиндра 30 связаны между собой.Распределитель 12 устанавливается в левую (по чертежу) позицию, при этом поршневая полость 10 сообщается с магистралью высокого давления, а штоковая полость 11 - с магистралью низкого давления. Шток 14 перемещает ползун 18, в результате чего подвижный фрикционный диск 15 прижимается к диску 16, а пружина 17 сжимается.
Разгон осуществляется следующим образом.
Распределитель 37 переводится в рабочие позиции, а распределитель 12 - в правую (по чертежу) позицию. Рабочая жидкость поступает в одну из полостей 31 и
32гидроцилиндра 30, перемещая поршни
33и 34 вместе с рейкой 35 и шестерней 36, что приводит к повороту колонны 1. Одновременно шток 14 гидроцилиндра 9 перемещается вверх вместе с ползунами 18 и 19 и фрикционным диском 15, но, поскольку он прижат к диску 16 через пружину 17, разъединение дисков 15 и 16 происходит не сразу, а с некоторой задержкой, что позволяет плавно осуществлять процесс разгона.
В процессе разгона-торможбния колонны 1 полости 5 и 6 гидроцилиндра 4 перекрыты, так как распределитель 7 установлен в нейтральную позицию, что исключает воздействие на стрелу 2 со стороны работающего механизма 3 поворота
Навинчиванием гаек 21 на стяжки 20 достигается начальная величина сжатия пружины 17. что дает возможность регулировать закон изменения тормозного момента.
Предложенное устройство позволяет повысить точность позиционирования путем изменения тормозного момента при изменении вылета стрелы 2 и массы груза 38 и устранения вертикальных перемещений колонны 1. Кроме того, пружина нагружена меньшей циклической нагрузкой, так как исключено воздействие на нее силы тяжести колонны t и груза 38.
Технико-экономическая эффективность от применения предложенного устройства заключается в повышении точности позиционирования груза в пространстве при работе с грузами различной массы и разным вылетом стрелы, а также в повышении долговечности работы манипулятора за счет устранения дополнительных ёертикзльных колебаний колонны
Редактор Л.Пчолинская
Составитель В.Коваль Техред М.Моргентал
.Формула изобретения Поворотное устройство манипулятора, содержащее колонну, кинематически связанную со стрелой и механизмом поворота,
расположенное в полости колонны тормозное устройство, выполненное в виде гидро- цилиндра, взаимодействующего с подвижным и неподвижным фрикционными дисками и демпфирующей пружиной, одно0 штоковый гидроцилиндр подъема стрелы, размещенный между колонной и стрелой, отличающееся тем, что. с целью повышения надежности и точности позиционирования, устройство снабжено датчи5 ком усилия, выполненным в виде подпружиненного одноштокового гидроцилиндра, расположенного в полости колонны с возможностью взаимодействия его штока с корпусом гидроцилиндра тормозного уст0 ройства, при этом корпус последнего установлен с возможностью перемещения в полости колонны, а поршневые полости гидроцилиндров подьема стрелы и датчика усилия непосредственно связаны между собой.
2
Фиг.1
Корректор Д.Патай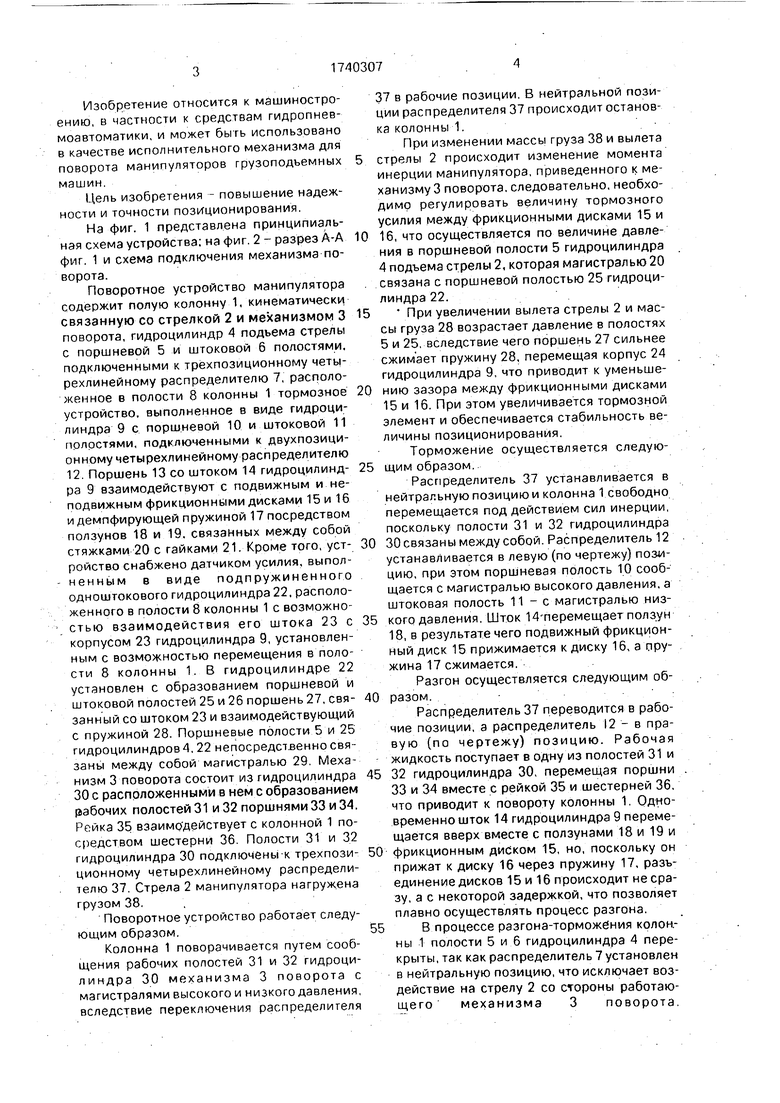
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОВОРОТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1991 |
|
RU2010767C1 |
| Гидравлическая система погрузчика | 1991 |
|
SU1827444A1 |
| Гидравлическая система погрузчика | 1991 |
|
SU1827443A1 |
| Рекуперативный гидропривод лесовозного тягача с полуприцепом | 2019 |
|
RU2726987C1 |
| Поворотное устройство манипулятора | 1989 |
|
SU1668279A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД СТРЕЛОВОГО САМОХОДНОГО КРАНА | 2002 |
|
RU2213042C1 |
| Поворотное устройство манипулятора | 1989 |
|
SU1728124A1 |
| МНОГОСЕКЦИОННЫЙ ГИДРОПРИВОД КРАНОМАНИПУЛЯТОРНОЙ УСТАНОВКИ | 2007 |
|
RU2352518C1 |
| ГИДРОПРИВОД ПОГРУЗЧИКА С ПОВОРОТНОЙ КОЛОННОЙ | 2011 |
|
RU2455222C1 |
| Гидропривод подъемного механизма | 1987 |
|
SU1492115A1 |
Изобретение м.б. использовано в качестве исполнительного механизма для поворота манипуляторов грузоподъемных машин. Цель изобретения - повышение надежности и точности позиционирования. В полости 8 колонны 1 установлены гидроцилиндры (ГЦ) 9, 22, причем корпус 24 ГЦ 9 связан со штоком 23 ГЦ 22 и имеет возможность перемещения в полости 8. Шток 14 ГЦ 9 взаимодействует с подвижным и неподвижным фрикционными дисками 15, 16, а поршневая полость 25 ГЦ подключена к поршневой полости 5 ГЦ 4 подъема стрелы 2. Изобретение позволяет повысить точность позиционирования груза; 38 в пространстве путем изменения тормозного момента при изменении вылета стрелы 2 и массы груза 38, устранить вертикальные перемещения колонны 1. 2 ил. ё VI О ы о х|Фиг 2
| Поворотное устройство манипулятора | 1989 |
|
SU1668279A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
