Автоматизированные молотковые дробилки, включающие загрузочный бункер с затвором, положение которого автоматически регулируется в зависимости от числа оборотов двигателя, известны. Однако загрузочные устройства таких дробилок не позволяют изменять подачу продукта в зависимости от его физико-механических свойств, а центробежный регулятор не дает возможности поддерживать заданную мощность в широких пределах ее изменения.
В предлагаемой дробилке под бункером установлен поворотный вибролоток, угол наклона которого может меняться в зависимости от физико-механических свойств продукта, а в качестве регулятора загрузки применен электрический изодромный регулятор с датчиком мощности в цепи двигателя дробилки.
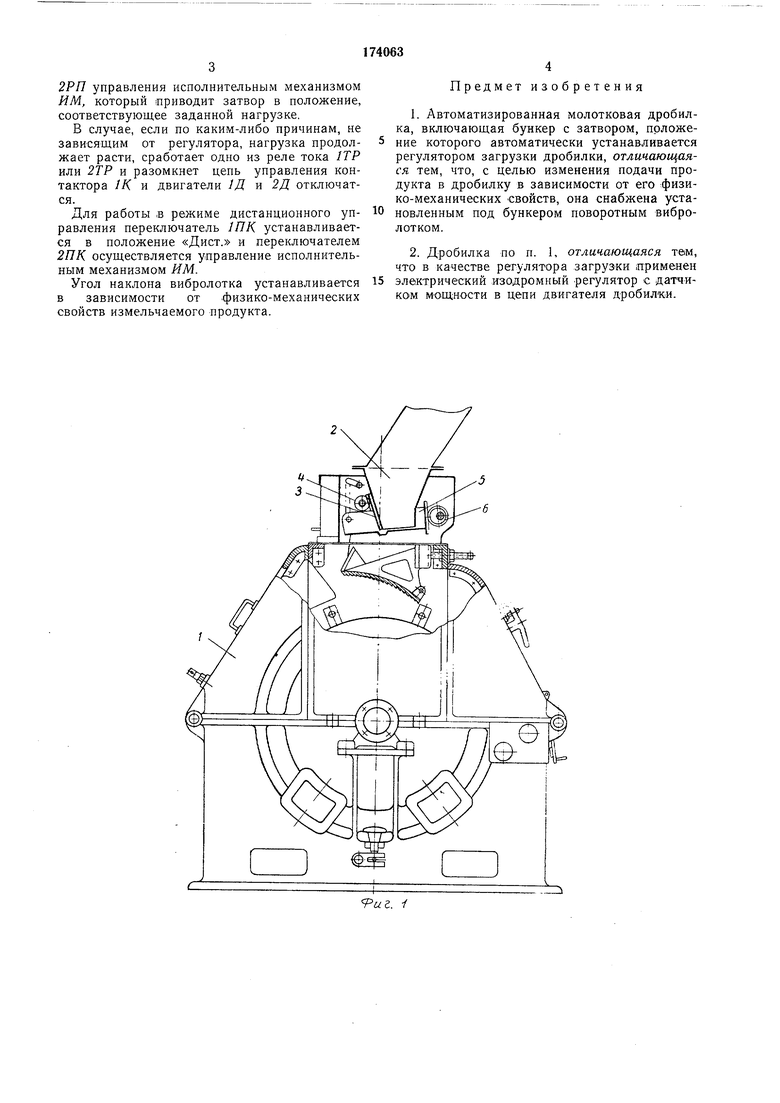
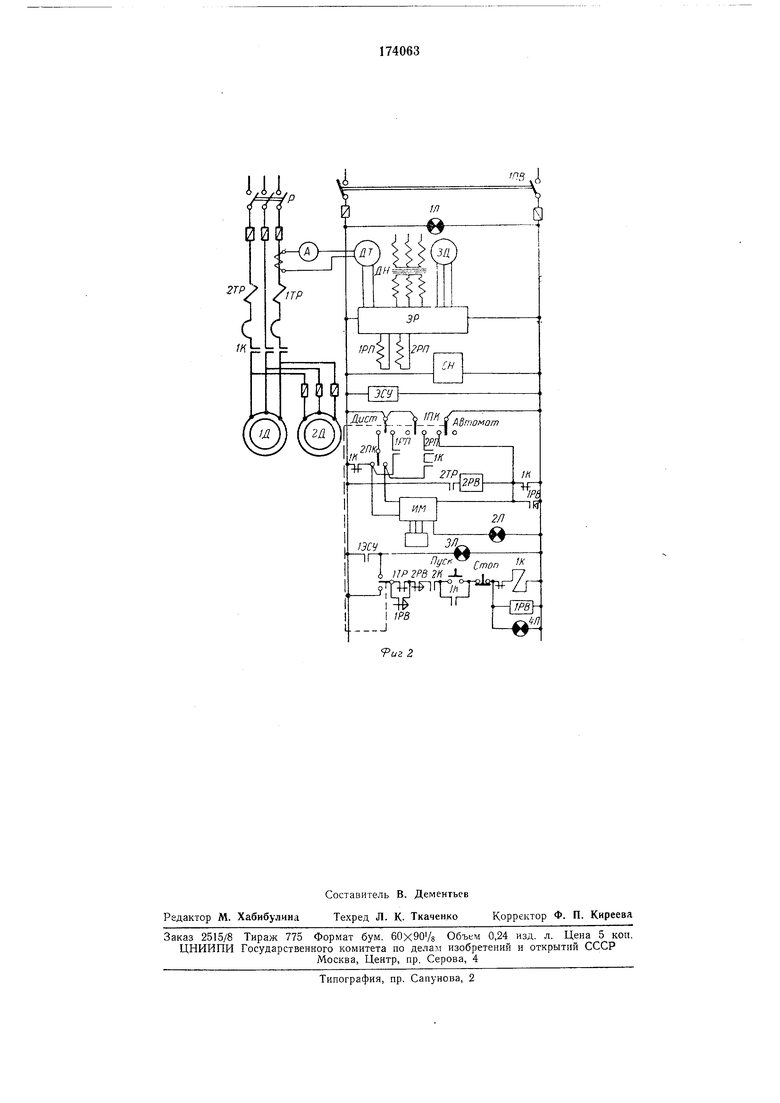
На фиг. 1 представлена предлагаемая дробилка; на фиг. 2 - электрическая схема ее управления.
Дробилка содержит собственно дробилку /, бункер 2 с затвором 3, привод 4 затвора, поворотный лоток 5 с вибромеханизмом 6.
Схемой управления предусмотрены два режима управления работой дробилки: автоматический и дистанционный.
При работе дробилки в автоматическом режиме после включения силовой цепи рубильНИКОМ Р и цепи управления переключателем
1ПВ, переключатель 1ПК устанавливается в положение «Автомат и при наличии, продукта в бункере (контакты 1ЭСУ сигнализатора уровня ЭСУ зам кнуты, сигнальная лампа ЗЛ горит) цепь управления дробилки готова к пуску.
Нажатием кнопки «Пуск включаются главные контакты 1К управления двигателями 1Д дробилки и 2Д привода затвора, реле времени IPB и сигнальная лампа 4Л.
Спустя установленное время, когда двигатель /Д наберет номинальное число оборотов, размыкаются контакты 1РВ, шунтирующие контакты ГГР, мгновенной перегрузки двигателя }Д на и замкнутся контакты i/PS, размещенные в цепи защиты двигателя от перегрузки на- 200/0 (контакты 2ТР и реле времени 2РВ} с выдержкой времени, необходимой на случай, если нагрузка спадет раньще, чем сработает реле 2РВ.
Поскольку в момент пуска нагрузка на двигатель }Д огсутствует, реле 1РП изодромного регулятора ЭР будет под напряжением и исполнительный механизм ЯМ будет открывать затвор до тех пор, пока нагрузка на двигатель 1Д не достигнет значения, установленного задатчиком ЗД. При этом реле 1РП обесточит и разомкнет контакты 1РП.
В процессе работы при несоответствии заданной и фактической нагрузок, реле 1РП или 2РП включают свои контакты 1РП или
2РП управления исполнительным механизмом ИМ, который приводит затвор в положение, соответствующее заданной нагрузке.
В случае, если по каким-либо причинам, не зависящим от регулятора, нагрузка продолжает расти, сработает одно из реле тока 1ТР или 2ТР и разомкнет цепь управления контактора /К и двигатели 1Д и 2Д отключатся.
Для работы в режиме дистанционного управления переключатель ШК устанавливается в положение «Диет. и переключателем 2ПК осуществляется управление исполнительным механизмом ИМ.
Угол наклона вибролотка устанавливается в зависимости от физико-механических свойств измельчаемого продукта.
Предмет изобретения
1.Автоматизированная молотковая дробилка, включающая бункер с затвором, прложение которого автоматически устанавливается регулятором загрузки дробилки, отличающаяся тем, что, с целью изменения подачи продукта в дробилку в зависимости от его физико-механических СВОЙСТВ, она снабжена установленным под бункером поворотным вибролотком.
2.Дробилка по п. 1, отличающаяся т&м, что в качестве регулятора загруЗКИ применен
электрический изодромньш регулятор с датчиком мощности в цепи двигателя дробилки.
- t
