Изобретение относится к подъемно- транспортным машинам в частности к шаговым тяговым механизмам.
Известны шаговые тяговые механизмы, содержащие домкрат с двухсторонним полым штоком, через отверстие которого пропущен гибкий грузонесущий элемент, выполненный в виде цепи, и смонтированный на штоке домкрата храповый механизм, взаимодействующий с грузонесущим элементом.
Основным недостатком данных механизмов является использование домкрата специальной конструкции и невозможность использовать их для подъема груза.
Известен шаговый тяговый механизм, содержащий два домкрата, установленные между двумя каретками, смонтированными на гибком грузонесущем элементе, выполненном в виде цепи, и связанными с ним посредством храповых механизмов.
Недостатками известного механизма является невозможность перемещения цепи при неподвижном закреплении одной из кареток, наличие холостого хода и наличие жесткого соединения груза с опорой, что не позволяет согласовать работу нескольких известных механизмов при статически неопределимой схеме нагружения.
Известен шаговый тяговый механизм, содержащий стойки с поддомкратной балкой, установленные на последней два домкрата, размещенные параллельно один другому, смонтированную на стойках каретку, связанную непосредственно со штоками домкратов, гибкий грузонесущий элемент, выполненный в виде цепи, смонтированные на каретке и поддомкратной балке фиксатоо
ры грузонесущего элемента и отклоняющее устройство, смонтированное на стойках над кареткой.
Недостатками данного механизма является наличие холостого хода, невозмож- ность согласования работы нескольких известных механизмов при статически неопределимой схеме нагружения, а также большие габариты подъемника по ширине.
Наиболее близким к предлагаемому по технической сущности является шаговый тяговый механизм, содержащий стойки, на которых жестко закреплены верхняя и нижняя поддомкратные балки, установленные на последних соосно один другому верхний и нижний домкраты, связанную со штоком верхнего домкрата траверсу с тягами, смонтированными в направляющих поддомкрат- ной балки и связанными двумя грузонесущими элементами с кареткой, смонтированной на стойках между поддом- кратными балками и связанной с третьим грузонесущим элементом, который размещен между двумя первыми с опиранием на шток нижнего домкрата, и смонтированные на каретке механизмы одностроннего хода.
Недостатком известного тягового механизма являются узкие функциональные возможности ввиду ограниченной высоты подъема груза, равной высоте подъема ка- ретки, ограниченной расстоянием между поддомкратными балками.
Цель изобретения - улучшение эксплуатационных характеристик путем увеличения дальности перемещения груза за счет неограниченной длины гибкого тягового органа.
Указанная цель достигается тем, что известный тяговый механизм для перемещения груза, содержащий вертикальные стойки с закрепленными на них верхней и нижней поперечными балками, установленные на поперечных балках верхний и нижний домкраты, П-образную траверсу, связанную своей перекладиной со штоком верхнего домкрата, а нижними концами своих боковых тяг - с подъемной кареткой, грузонесущий элемент, связанный с подъемной кареткой и со штоком нижнего домкрата с возможностью его шагового перемещения при поочередном включении домкратов, и фиксаторы одностороннего перемещения грузонесущего элемента, снабжен дополнительной подъемной кареткой, размещенной под нижней поперечной балкой выше основной каретки соосно ей, дополнительной П-образной траверсой, связанной своей перекладиной со штоком нижнего домкрата, а нижними концами своих боковых тяг - с дополнительной подъемной кареткой, и смонтированными под нижней поперечной балкой выше дополнительной каретки направляющими для изменения направления перемещения грузонесущего элемента на противоположное, при этом грузонесущий элемент представляет собой гибкий тяговый орган, рабочая ветвь которого размещена соосно подъемным кареткам с возможностью захода ее конца в упомянутые направляющие, а фиксаторы одностороннего перемещения грузонесущего элемента закреплены на основной и дополнительной каретках с возможностью захвата ними рабочей ветви гибкого тягового органа при подъеме кареток.
Благодаря этому в предлагаемом шаговом механизме для перемещения груза достигается неограниченная длина гибкого тягового органа и может быть обеспечено неограниченное перемещение груза; что существенно улучшает эксплуатационные характеристики шагового механизма.
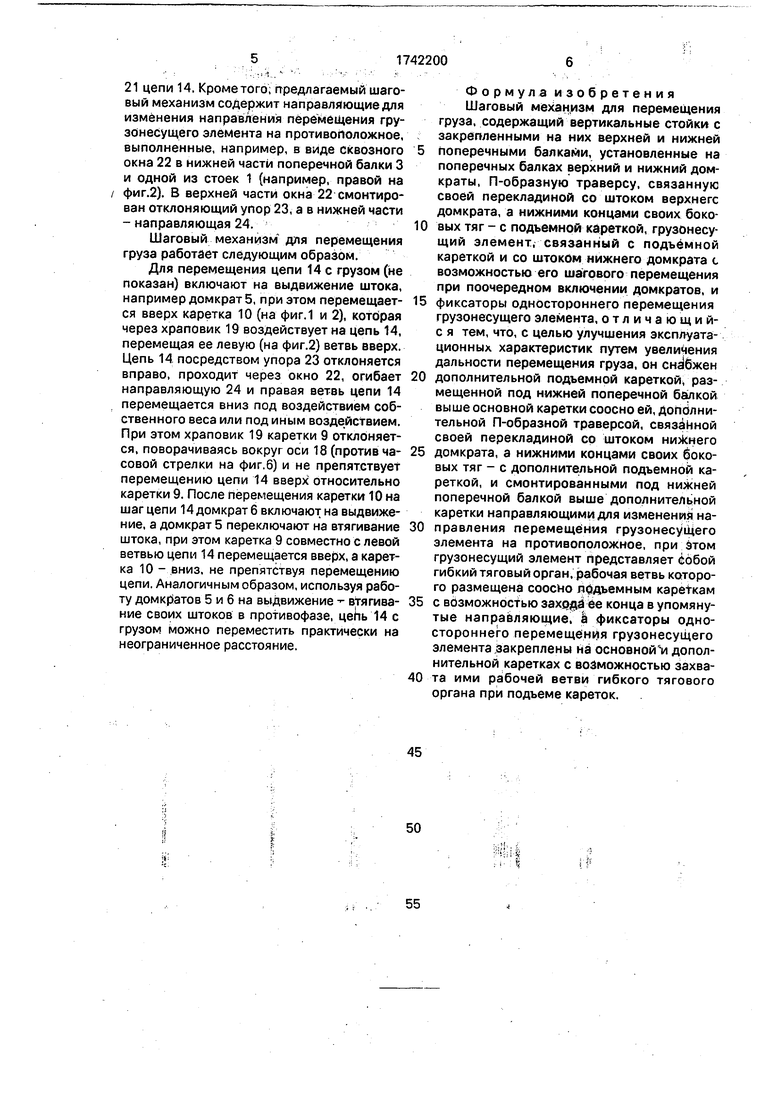
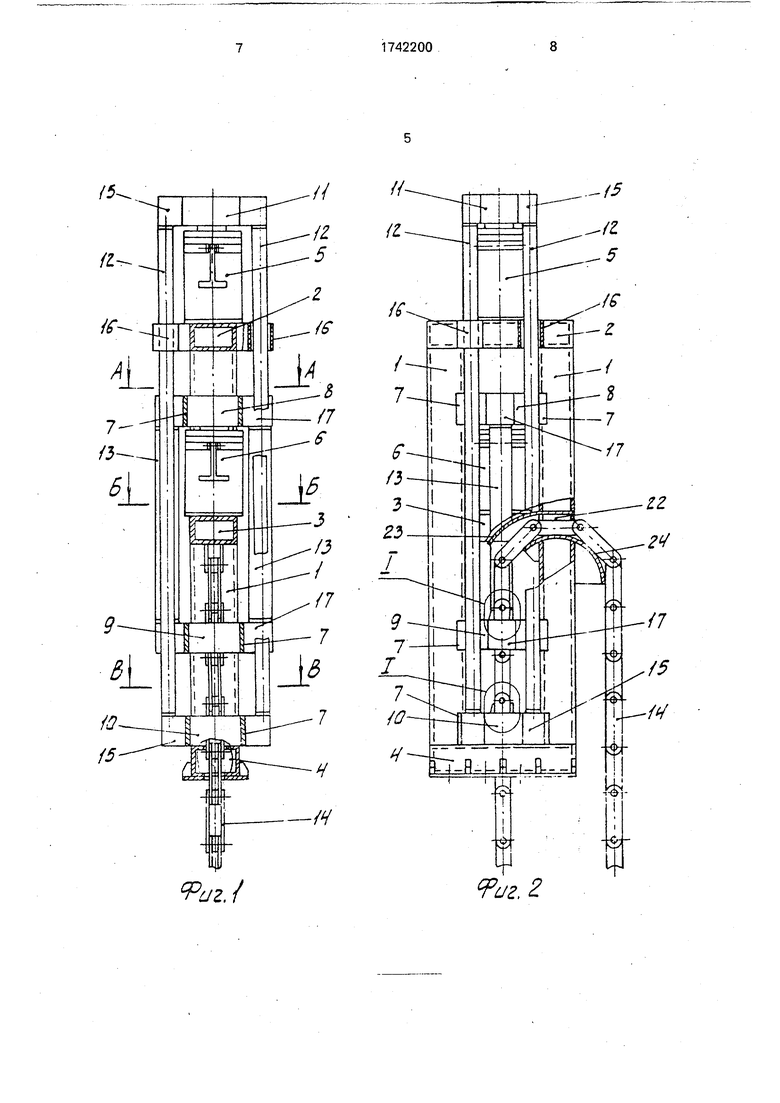
На фиг.1 изображен шаговый механизм для перемещения груза, общий вид; на фиг.2 - то же, вид сбоку; на фиг.З - разрез А-А на фиг. 1; на фиг.4 - разрез Б-Б на фиг, 1 ; на фиг.5 - разрез В-В на фиг.1; на фиг.6 - узел I на фиг.2.
Шаговый механизм для перемещения груза содержит раму, включающую в себя две стойки 1, верхнюю 2 и нижнюю 3 поперечные балки и опорную балку 4, установленные на поперечных балках 2 и 3 соосно один другому домкраты 5 и 6, смонтированные на стойках 1 посредством ползунов 7 каретки 8-10, П-образную траверсу 11 с четырьмя тягами 12, две тяги 13 и гибкий грузонесущий элемент, выполненный, например, в виде цепи 14. Каретка 8 размещена между поперечными балками 1 и 3, каретка 9 - под нижней поперечной балкой 3, а каретка 10 - ниже каретки 9. На каретке
10и П-образной траверсе 11 выполнено по четыре кронштейна 15, между которыми закреплены тяги 12, смонтированные в направляющих 16, выполненных на поперечной балке 2. П-образная траверса
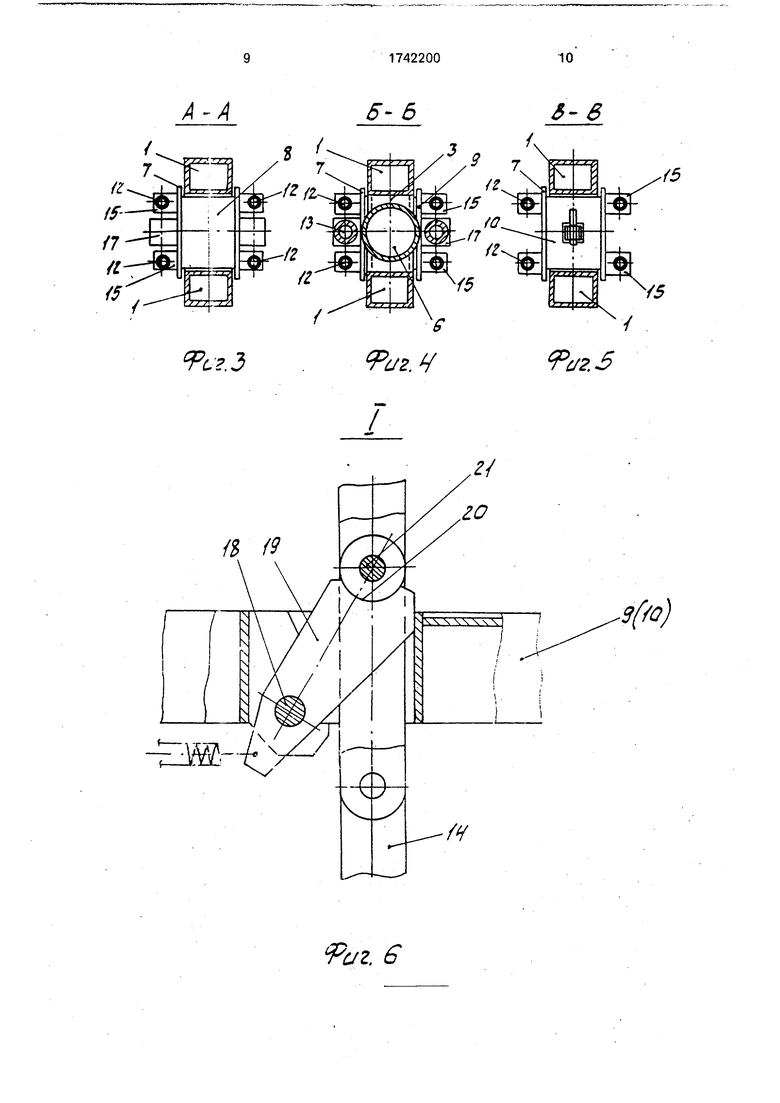
11опирается на шток домкрата 5. На каретках 8 и 9 выполнено по два кронштейна 17, между которыми закреплены тяги 13. Каретка b опирается на шток домкрата 6. В опорной балке 4 и каретках 9 и 10 выполнены сквозные окна, через которые пропущена цепь 14. Причем каретки 9 и 10 снабжены фиксаторами одностроннего хода грузонесущего элемента, каждый из которых выпол- нен, например, в виде щарнирно смонтированного на оси 18 подпружиненного храповика 19, на котором выполнены полуцилиндрические седловины 20 для осей
21 цепи 14. Кроме того, гтредлагаемый шаговый механизм содержит направляющие для изменения направления перемещения гру- зонесущего элемента на противоположное, выполненные, например, в виде сквозного окна 22 в нижней части поперечной балки 3 и одной из стоек 1 (например, правой на фиг.2). В верхней части окна 22 смонтирован отклоняющий упор 23, а в нижней части - направляющая 24.
Шаговый механизм для перемещения груза работает следующим образом.
Для перемещения цепи 14с грузом (не показан) включают на выдвижение штока, например домкрат 5, при этом перемещается вверх каретка 10 (на фиг.1 и 2), которая через храповик 19 воздействует на цепь 14, перемещая ее левую (на фиг.2) ветвь вверх. Цепь 14 посредством упора 23 отклоняется вправо, проходит через окно 22, огибает направляющую 24 и правая ветвь цепи 14 перемещается вниз под воздействием собственного веса или под иным воздействием. При этом храповик 19 каретки 9 отклоняется, поворачиваясь вокруг оси 18 (против часовой стрелки на фиг.6) и не препятствует перемещению цепи 14 вверх относительно каретки 9. После перемещения каретки 10 на шаг цепи 14 домкрат 6 включают на выдвижение, а домкрат 5 переключают на втягивание штока, при этом каретка 9 совместно с левой ветвью цепи 14 перемещается вверх, а каретка 10 - вниз, не препятствуя перемещению цепи. Аналогичным образом, используя работу домкратов 5 и б на выдвижение втягивание своих штоков в противофазе, цепь 14 с грузом можно переместить практически на неограниченное расстояние.
Формула изобретения Шаговый механизм для перемещения груза, содержащий вертикальные стойки с закрепленными на них верхней и нижней
поперечными балками, установленные на поперечных балках верхний и нижний домкраты, П-образную траверсу, связанную своей перекладиной со штоком верхнегс домкрата, а нижними концами своих боковых тяг - с подъемной кареткой, грузонесу- щий элемент, связанный с подъёмной кареткой и со штоком нижнего домкрата с возможностью его шагового перемещения при поочередном включении домкратов, и
фиксаторы одностороннего перемещения грузонесущего элемента, отличающий- с я тем, что, с целью улучшения эксплуатационных характеристик путем увеличения дальности перемещения груза, он снабжен
дополнительной подъемной кареткой, размещенной под нижней поперечной балкой выше основной каретки соосно ей, дополнительной П-образной траверсой, связанной своей перекладиной со штоком нижнего
домкрата, а нижними концами своих боковых тяг - с дополнительной подъемной кареткой, и смонтированными под нижней поперечной балкой выше дополнительной каретки направляющими для изменения направления перемещения грузонесущего элемента на противоположное, при этом грузонесущий элемент представляет собой гибкий тяговый орган, рабочая ветвь которого размещена соосно подъемным кареткам
с возможностью захода ее конца в упомянутые направляющие, а фиксаторы одностороннего перемещения грузонесущего элемента закреплены на основной и дополнительной каретках с возможностью захвата ими рабочей ветви гибкого тягового органа при подъеме кареток.
Фиг.{
г
ь.
со
Ol
I
о
-vi
J2
I-O ГО
о о
/
о
I

| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый подъемник | 1990 |
|
SU1740313A1 |
| Шаговый подъемник | 1989 |
|
SU1675192A1 |
| Шаговый подъемник | 1990 |
|
SU1776631A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2260561C2 |
| Шаговый подъемник | 1981 |
|
SU994395A1 |
| Шаговый подъемник | 1982 |
|
SU1039867A2 |
| Устройство для подъема крупногабарит-НыХ пОКРыТий | 1979 |
|
SU840017A1 |
| Шаговый подъемник | 1979 |
|
SU897709A1 |
| Шаговый подъемник | 1985 |
|
SU1364603A1 |
| Шаговый подъемник | 1972 |
|
SU436794A1 |
Сущность изобретения: шаговый механизм включает раму с верхней и нижней поперечными балками, на которых смонтированы домкраты, и каретки, выполненные с фиксаторами одностроннего хода грузоне- сущей цепи. Цепь протянута через каретки с возможностью подхвата ее звеньев фиксаторами кареток. Между каретками смонтированы направляющие для отклонения цепи. Поочередным перемещением кареток сквозь них протягивается грузонесущая цепь, к которой прикреплен груз. 6 ил. сл с
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| 1968 |
|
SU415226A1 | |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| ШАГАЮЩИЙ ТЯГОВЫЙ МЕХАНИЗМ ДЛЯ ПОДЪЕМА ГРУЗОВЫХ ПЛОЩАДОК | 0 |
|
SU404767A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Грузоподъемное устройство | 1973 |
|
SU500178A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Шаговый подъемник | 1989 |
|
SU1675192A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
