Изобретеиие отиосится к грузоподъемным средствам, в частности, к шагающим тяговым механизмам для подъема грузовых площадок.
Известны шагающие тяговые механизмы для подъема грузовых площадок, содержащие спаренные силовые цилиндры со щтоками, шарнирно соединенные с ползунами, взаимодействующими с грузовой цепью. Однако такие механизмы сложны и малонадежны в работе.
Цель изобретения - упрощение конструкции и повышение надежности в работе.
Для этого ползуны выполнены в виде гильз с поворотными кулачками, попеременно опирающимися на соединительную ось звеиьев грузовой цепи. Кроме того, грузовая цепь выполнена в виде направляющей с поперечным сечением прямоугольного профиля по наружному контуру без выступающих частей.
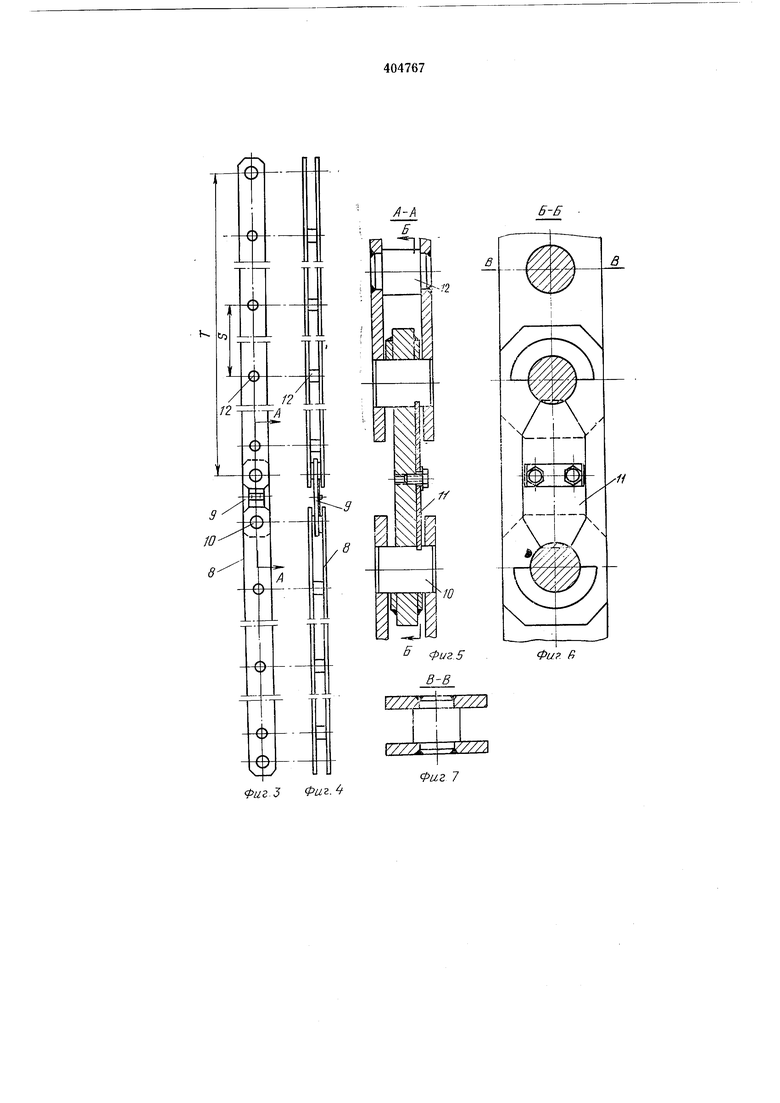
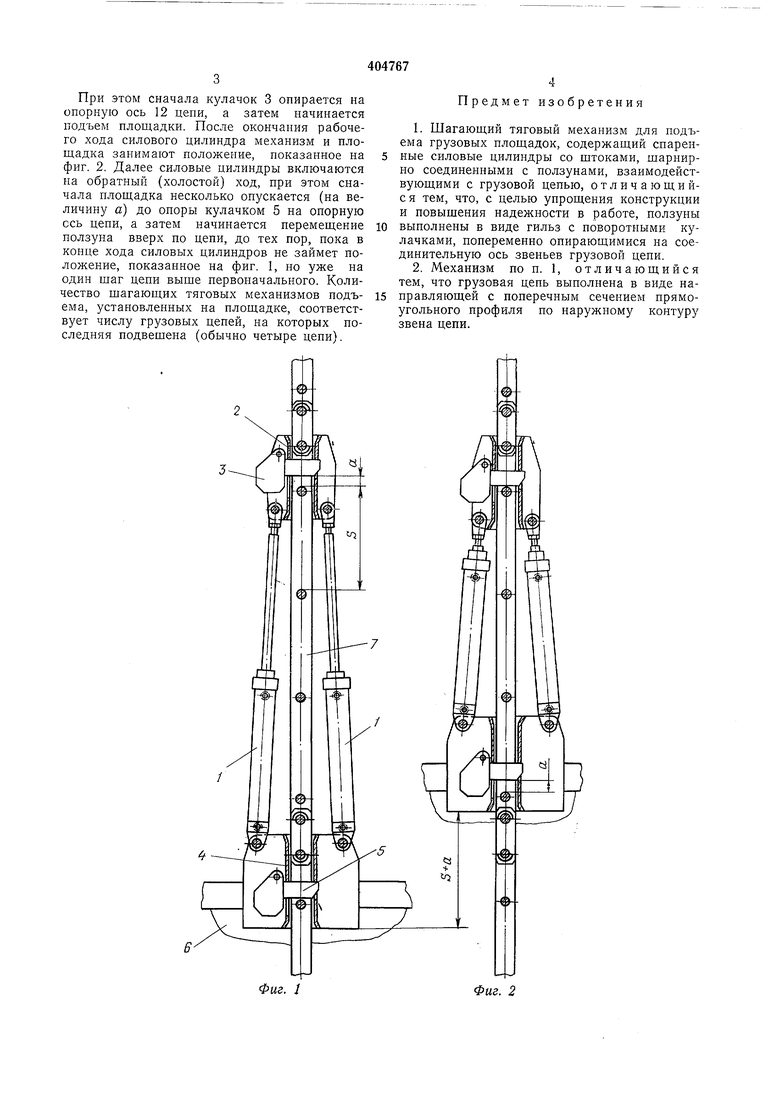
На фиг. 1 дана схема предлагаемого механизма, начальное положение; па фиг. 2 - то же, после подъема площадки на один шаг; на фиг. 3 - схема грузовой цепи, вид сбоку (условно показано только два основных звена); на фиг. 4 - то же, вид спереди; на фиг. 5- разрез по А-А на фиг. 3; на фиг. 6- разрез по Б-Б на фиг. 5; на фиг. 7-разрез
9
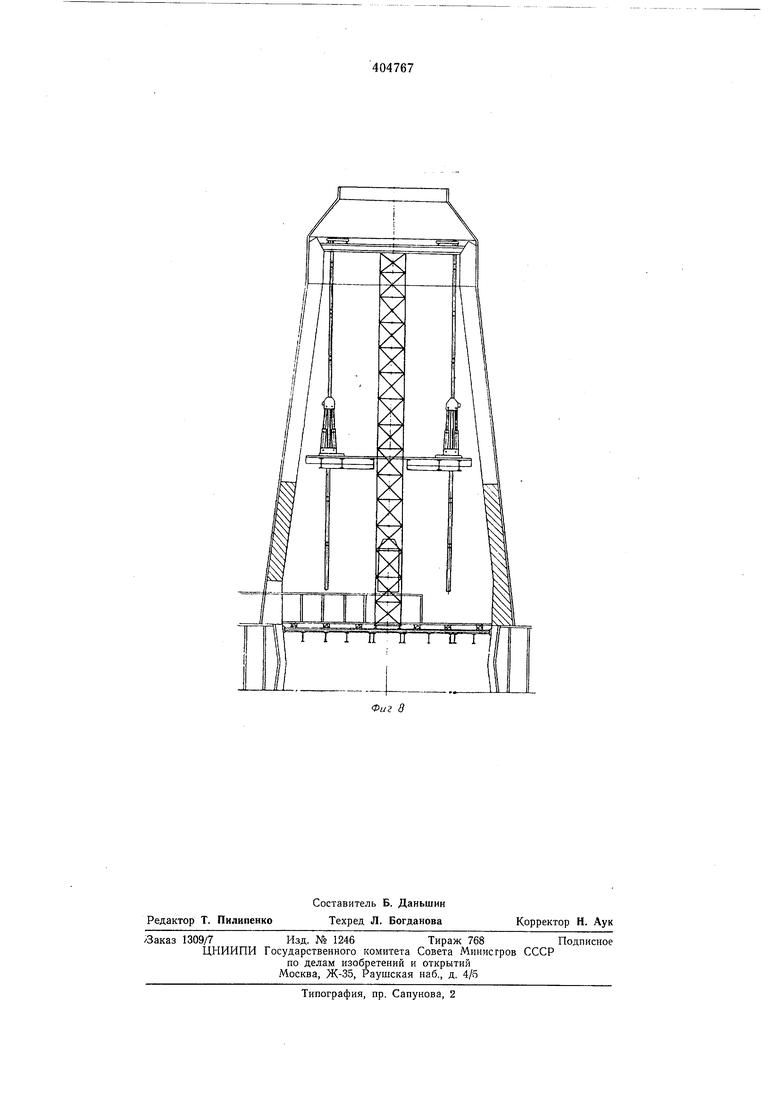
но В-В на фиг. 6; па фиг. 8 - площадка с шагающим тяговым механизмом.
Шагающий тяговый механизм состоит из
силовых цилиндров 1, ползуна 2 с опорным
поворотпым кулачком 3 и направляющей
обоймы 4, снабженной опорным поворотным
кулачком 5.
Направляющая обойма 4 закреплена кнадвесной площадке 6, а ползун 2 может перемещаться по грузовой цепи 7 как по направляющей.
Грузовая цепь состоит из длинных основных 8 и коротких соедипительпых 9 звепьев, скрепленных соединительными осями 10, и стопорных планок И, фиксирующих оси 10 в поперечпом направлении.
В основных звеньях 8 закреплены опорные оси 12, на которые опираются кулачки 3 в процессе подъема.
Механизм работает следующим образом. Перед подъемом площадка 6 опирается на цепь кулачком 5 обоймы 4, а силовые цилиндры находятся в крайнем выдвинутом положении.
Для подъема включается гидропривод (на фиг. не показан) и рабочая жидкость, поступая в силовые цилиндры, приводит к сжатию последних.
При этом сначала кулачок 3 опирается на опорную ось 12 цепи, а затем начинается подъем площадки. После окончания рабочего хода силового цилиндра механизм и площадка занимают положение, показанное на фиг. 2. Далее силовые цилиндры включаются на обратный (холостой) ход, при этом сначала площадка несколько опускается (на величину а) до опоры кулачком 5 на опорную ось цепи, а затем начинается перемещение ползуна вверх по цепи, до тех пор, пока в конце хода силовых цилиндров не займет положение, показанное на фиг. I, по уже на один щаг цепи выще первоначального. Количество щагающих тяговых механизмов подъема, установленных на площадке, соответствует числу грузовых цепей, на которых последняя подвещена (обычно четыре цепи).
Предмет изобретения
1.Шагающий тяговый механизм для подъема грузовых площадок, содержащий спаренные силовые цилиндры со щтоками, щарнирно соединенными с ползунами, взаимодействующими с грузовой цепью, отличающийс я тем, что, с целью упрощения конструкции и повышения надежности в работе, ползуны выполнены в виде гильз с поворотными кулачками, попеременно опирающимися на соединительную ось звеньев грузовой цепи.
2.Механизм по ц. 1, отличающийся тем, что грузовая цепь выполнена в виде направляющей с поперечным сечением прямоугольного профиля по наружному контуру звена цепи.
Фиг.З ФигА
Б-Б
Фиг 7
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный пресс для объемной горячей штамповки заготовок | 1989 |
|
SU1804943A1 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНЕШНЕГО И ВНУТРЕННЕГО СГОРАНИЯ | 2000 |
|
RU2202701C2 |
| ГРУЗОПОДЪЕМНЫЙ КРАН ДЛЯ ЗАМЕНЫ БАТАРЕЙ ШАХТНЫХ | 1970 |
|
SU262344A1 |
| ПЛАНЕТАРНЫЙ МОТОР-КОМПРЕССОР | 1993 |
|
RU2095578C1 |
| УСТРОЙСТВО ДЛЯ ОСТАНОВКИ КАРЕТКИ, ВЗАИМОДЕЙСТВУЮЩЕЙ С ТЯГОВОЙ ЦЕПЬЮ | 1998 |
|
RU2137691C1 |
| Пресс-автомат | 1987 |
|
SU1447512A1 |
| ГИДРАВЛИЧЕСКИЙ ПОДЪЕМНИК | 1970 |
|
SU262357A1 |
| Устройство для смены блоков стрелочных переводов | 1986 |
|
SU1325115A1 |
| САМОПОДЪЕМНЫЙ БАШЕННЫЙ КРАН | 1971 |
|
SU422679A1 |
| Грузоподъемный борт транспортного средства | 1979 |
|
SU887292A1 |