(Л
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый подъемник | 1989 |
|
SU1675192A1 |
| Шаговый механизм для перемещения груза | 1990 |
|
SU1742200A1 |
| Шаговый подъемник | 1990 |
|
SU1776631A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2260561C2 |
| Шаговый подъемник | 1982 |
|
SU1039867A2 |
| Шаговый подъемник | 1981 |
|
SU994395A1 |
| ПОДЪЕМНИК | 2003 |
|
RU2263624C2 |
| Шаговый подъемник | 1978 |
|
SU767013A1 |
| Шаговый подъемник | 1979 |
|
SU897709A1 |
| Устройство для автоматического расцепления вагонов движущихся поездов | 2018 |
|
RU2700208C1 |
Изобретение относится к подъемно- транспортным машинам и предназначено для перемещения по вертикали различных грузов. Шаговый подъемник содержит поперечную балку на стойках с установленным на ней домкратом, связанным штоком с Pi- образной рамой с грузонесущими тягами. На упорах стоек и тяг установлена своими ответными упорами каретка. Грузонесущие тяги закреплены шарнирно с возможностью их отклонения в вертикальной плоскости кареткой. Нижние концы грузонесущих тяг размещены с возможностью взаимодействия с концевыми выключателями и выполнены с фиксаторами. 2 з.п. ф-лы, 4 ил.
Изобретение относится к подъемно- транспортным машинам, в частности к подъемникам с шаговым приводом.
Известен шаговый подъемник, содержащий опору с поперечной балкой, на которой установлены домкраты, связанные с вертикальными грузонесущими элементами, смонтированными в направляющих под- домкратной балки и каретки, на которой шарнирно установлены управляемые упоры с возможностью взаимодействия с опорными площадками вертикальных грузо несущих элементов 1. Основной недостаток данного подъемника определяется наличием управляемых упоров, установленных на каретке. Во-первых, из-за малых габаритов каретки возникают сложности с компоновкой как самих управляемых упоров, так и их управляющих и контролирующих устройств. Это определяет их недостаточную прочность и надежность в работе. Во-вторых, управляемые упоры приходится располагать
внутри каретки, что затрудняет их техническое обслуживание и визуальный контроль за их работой. В-третьих, поскольку каретка перемещается в пространстве и может быть расположена на значительной высоте, затруднено ручное управление ими. В-четвертых, при выполнении электрических или гидравлических систем контроля и управления упорами возникает необходимость подвода электрических или гидравлических цепей к подвижной каретке, что усложняет их конструкцию и снижает надежность.
Наиболее близким к предлагаемому является шаговый подъемник, содержащий установленные на основании вертикальные стойки, связанные в их верхней части поперечной балкой, установленные на основании и поперечной балке п риводные домкраты, П-образную раму, связанную Своей перекладиной со штоком верхнего домкрата, грузонесущие тяги, шарнирно закрепленные своими верхними концами на
XI
4 О СО
CJ
боковых стойках П-образной рамы и выполненные с равномерно расположенными по их высоте упорами, опорное средство, выполненное в виде опирающегося на шток нижнего домкрата жесткого толкателя с равномерно расположенными по его высоте ответными упорами, и подъемную каретку, имеющую управляемые упоры, выполненные с возможностью опирания на упоры грузонесущих тяги жесткого толкателя. Гру- зонесущие тяги и жесткий толкатель смонтированы в направляющих каретки и могут совершать только возвратно-поступательные перемещения.
Однако, из-за наличия управляемых упоров, смонтированных на каретке, данный подъемник недостаточно надежен в работе.
Цель изобретения - повышение надежности подъемника.
Указанная цель достигается тем, что в шаговом подъемнике, содержащем установленные на основании вертикальные стойки, связанные в их верхней части поперечной балкой, по крайней мере один приводной домкрат, установленный на поперечной балке, П-образную раму, связанную своей перекладиной со штоком домкрата, грузонесущие тяги, шарнирно закрепленные своими верхними концами на боковых стойках П-образной рамы и выполненные с равномерно расположенными по их высоте упорами, опорное средство с равномерно расположенными по его высоте ответными упорами, и подъемную каретку, имеющую упоры, размещенные с возможностью их опирания на упоры грузонесущих тяг и ответные упоры опорного средства, опорное устройство представляет собой вертикальные балки по количеству грузонесущих тяг, шарнирно закрепленные своими верхними концами на поперечной балке, подъемник снабжен приспособлениями для возврата этих балок и грузонесущих тяг в вертикальное положение, при этом упоры каретки закреплены жестко с ее внутренней и внешней сторон и выполнены с возможностью отклонения ими от вертикального положения грузонесущих тяг при опускании этих тяг и балок опорного средства при подъеме каретки.
Кроме того, на основании смонтированы фиксаторы грузонесущих тяг и балок опорного средства в их отклоненном от вертикали положении и концевые выключатели, установленные с возможностью их взаимодействия с нижними концами грузонесущих тяг и балок опорного средства в их вертикальном положении и связанные с приводом домкрата.
Грузонесущие тяги и балки опорного средства размещены в параллельных плоскостях.
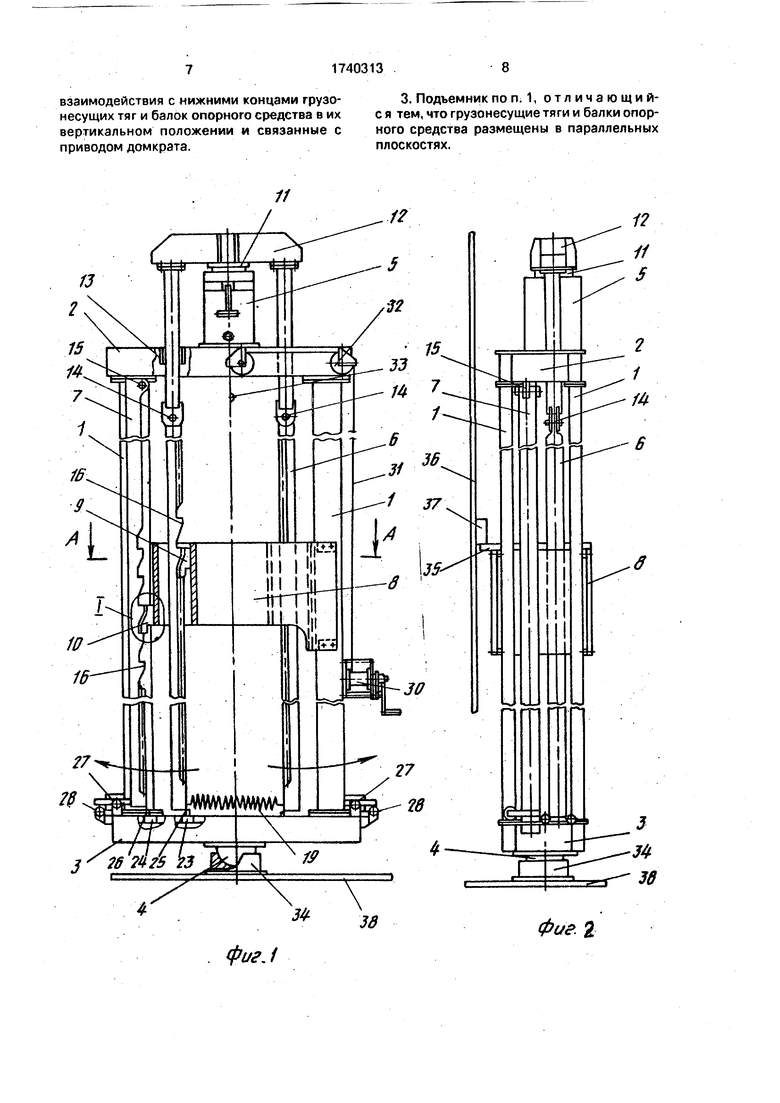
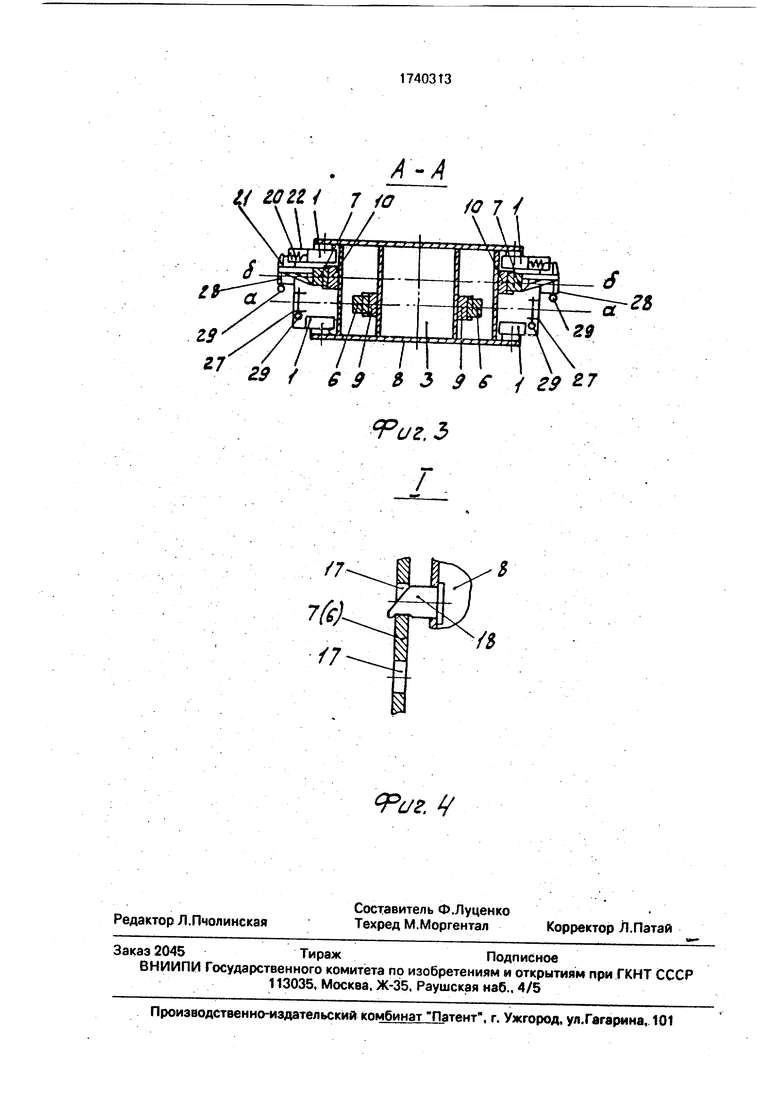
На фиг. 1 изображен шаговый подъемник, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - разрез А-А на фиг. 1; на фиг. 4 - узел I на фиг. 1.
Шаговый подъемник содержит четыре стойки 1, верхнюю поперечную балку 2, ос0 нование 3 с шаровой пятой 4, домкрат 5, пару грузонесущих тяг 6, опорное средство, выполненное в виде пары вертикальных балок 7, и смонтированную на стойках 1 каретку 8 с упорами 9 и 10. На штоке 11 домкрата
5 5 установлена П-образная рама 12, стойки которой смонтированы в направляющих отверстиях 13 поддомкратной балки 2 и соединены шарнирами 14 с верхними частями грузонесущих тяг 6. Верхние концы балок 7
0 шарнирами 15 закреплены на поддомкратной балке 2. При этом грузонесущие тяги б и балки 7 расположены в двух параллельных плоскостях (а-а и б-б на фиг. 3) таким образом, что балки 7 не препятствуют повороту
5 тяг б, а стойки 1 - повороту тяг 6 и балок 7. Это позволяет уменьшить расстояние междустойками 1 и балками 7, а следовательно, габариты подъемника по ширине (фиг. 1 и 3). Упоры 9 и 10 установлены в соответствую0 щих плоскостях а-а и б-б (фиг. 3) с возможностью взаимодействия с упорами грузонесущих тяг б и балок 7 и закреплены на каретке 8 жестко. Упоры грузонесущих тяг6 и балок 7 могут быть выполнены в виде
5 зубьев 16 или в виде отверстий 17, при этом упоры 9 и 10 могут быть выполнены в виде пальцев 18 со скосом. Грузонесущие тяги 6 и балки 7 снабжены устройствами для принудительного возврата их в вертикальное
0 положение, которые могут быть выполнены, например, в виде пружины 19 растяжения, установленной между нижними концами грузонесущих тяг 6, и пружин 20 растяжения, установленных между Г-образными
5 кронштейнами 21, закрепленными на нижних концах балок 7, и стаканами 22, закрепленными на стойках 1. Устройства контроля за работой шагового механизма выполнены, например, в виде конечных выключате0 лей 23 и 24, смонтированных на основании 3 с возможностью взаимодействия с упорами 25 и 26, закрепленными на нижних концах тяг 6 и балок 7, при вертикальном положении тяг 6 и балок 7. Устройства для
5 управления шаговым механизмом, например выключения шагового механизма, выполнены в виде кронштейнов 27 и 28 с пальцами (фиксаторами) 29. Кронштейны 27 и 28 смонтированы на основании 3 с возможностью взаимодействия пальцев 29 с
упорами 25 и 26 при отклонении тяг б и балок 7 до выхода их упоров (зубьев 16 или отверстий 17) из зацепления с упорами 9 и 10. Подъемник снабжен ручной лебедкой 30, установленной на одной из стоек 1. Трос 31 лебедки 30 запасован на ролики 32, смонтированные на поперечной балке 2, и имеет на конце крюк 33. Шаровая пята 4 установлена на опорный башмак 34. На каретке 8 выполнена опорная площадка 35 для груза.
Подьем груза, например цилиндрических обечаек стенки 36 металлического резервуара, посредством предлагаемого шагового подъемника осуществляют следующим образом.
Устанавливают несколько шаговых подъемников по окружности вдоль стенки 36 и приваривают к ней скобы 37 над грузовыми площадками 35. При этом опорные башмаки 34 закрепляют на днище 38 резервуара. Для подъема стенки 36 домкрат 5 включают на выдвижение штока 11, при этом грузонесущиетяги 6, зубья 16 которых входят в зацепление с упорами 9, и каретка 8 со стенкой 36 перемещаются вверх. Балки 7 под воздействием упоров 10 отклоняются, поворачиваясь вокруг осей шарниров 15, и не препятствуют перемещению упоров 10 вверх. После перемеещния каретки 8 на шаг зубьев 16 балки 7 под воздействием собственного веса и пружин 20 возвращаются в вертикальное положение, при этом упоры 26 воздействуют наконечные выключатели 24, которые подают сигнал в цепь управления подъемниками. После срабатывания конечных выключателей 24 всех подъемников их домкраты 5 включают на опускание штоков 11, Каретка 8 каждого подъемника по- средством упоров 10, входящих в зацепление с зубьями 16, опирается на балки 7. После снятия нагрузки с тяг 6 при дальнейшем их перемещении вниз они под воздействием упоров 9 отклоняются, поворачиваясь вокруг осей шарниров 14. После перемещения тяг 6 вниз на шаг зубьев 16 они под воздействием собственного веса и пружин 19 возвращаются в вертикальное положение, при этом упоры 25 воздействуют на конечные выключатели 23. После срабатывания конечных выключателей 23 всех подъемников их домкраты 5 включаются на выдвижение штоков 11 и аналогично описанному осуществляется подъем каретки 8 на второй и последующие шаги зубьев 16. После подъема стенки 36 и установки ее на очередную обечайку отклоняют балки 7 и фиксируют их в таком положении, устанавливая пальцы 29 в кронштейны 28. Затем срезают скобы 37, крюк 33 соединяют с кареткой 8 и лебедкой 30, приподнимают каретку 8 до снятия нагрузки с тяг 6, отклоняют их и фиксируют в таком положении, устанавливая пальцы 29 в кронштейны 27. В таком положении тяг 6 и балок 7 зубья 16 не
5 могут взаимодействовать с упорами 9 и 10 каретки 8 и ее опускают в нижнее положение лебедкой 30.
Подъем последующих обечаек осуществляют аналогичным образом.
0 Технико-экономические преимущества предлагаемого шагового подъемника в сравнении с прототипом заключаются в повышении удобств наблюдения, контроля, управления работой шагового механизма и
5 его обслуживания, упрощении конструкции подъемника в результате установки устройств контроля и управления на неподвижной части подъемника, а также повышенной надежности шагового механизма.
0
Формула изобретения
0 закрепленные своими верхними концами на боковых стойках П-образной рамы и выполненные с равномерно расположенными по их высоте упорами, опорное средство с равномерно расположенными по его в ICOTC от5 ветными упорами и подъемную каретку, имеющую упоры, размещенные с возможностью их опирания на упоры грузонесущих тяг, и ответные упоры опорного средства, отличающийся тем, что, с целью
0 повышения надежности, опорное средство представляет собой вертикальные балки в количестве, равном количеству грузонесущих тяг, шарнирно закрепленные своими верхними концами на упомянутой попереч5 ной балке, подъемник снабжен приспособлениями для возврата этих балок и грузонесущих тяг в вертикальное положение, при этом упоры каретки закреплены жестко с ее внутренней и внешней сторон и выполнены с возможностью отклонения
0 ими от вертикального положения грузонесущих тяг при опускании этих тяг и балок опорного средства при подъеме каретки.
взаимодействия с нижними концами грузо3. Подъемник по п. 1, отличающийнесущих тяг и балок опорного средства в их с я тем, что грузонесущие тяги и балки опор- вертикальном положении и связанные с ного средства размещены в параллельных приводом домкрата.плоскостях.
13
фиг.1
л-л
Г/ гогг 4 7 to /071
т
& / 69 & 3 # Ј / г9 7
Рс;г.З
| Шаговый подъемник | 1985 |
|
SU1364603A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Устройство для обслуживания вертикально расположенных объектов | 1989 |
|
SU1675182A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
