палентный электрический сигнал Е. Преобразователь 1 установлен на стойках 6 основания 7 с регулируемыми опорами 8 при помощи горизонтальной оси 9, которая позволяет повернуть рабочую ось вибрационной установки в вертикальной плоскости на угол f рад в направлении стрелки В.
Рабочую ось вибрационной установки ориентируют горизонтально соответствующим поворотом преобразователя 1 и вращением опор 8 в основании 7. На платформу 2 устанавливают акселерометр 3, ориентируя его измерительную ось в направлении стрелок А рабочей осн. Преобразователь 1 тока перемещает платформу 2 с акселерометром 3 в направлении рабочей оси по временному закону, соответствующему изменению тока. При гармоничном
законе изменения тока платформа 2 совершает основные периодические линейные перемещения ускорением
„ sincot с
Х -KX-IQ-W sinot
где К,
1„ СО t коэффициент преобразования
тока в линейное перемещение1
преобразователем 5;
амплитуда тока в обмотке
преобразователя 1;
круговая частота;
время.
В связи с тем, что у преобразователя 1 тока в линейное перемещение конструкторско-технологически не представляется возможным выполнить абсолютно симметричными свойствами магнитной., электрической и упругой систем в радиальных направлениях относительно рабочей оси, наряду с основными линейными перемещениями имеют место поперечная и угловая составляющие перемещения платформы 2. Наибольшую погрешность в результат градуировки вносит составляющая углового перемещения платформы 2 в вертикальней плоскости в связи с изменением проекции вектора гравитационного пол Земли на измерительную ось акселерометра 3, которая может быть определена согласно выражения
Xr«g ain(f°g 8in(q q BinOt), где
Хг
проекция вектора онного ускорения тельную ось;
гравитаци- на иэмери
5
0
5
0
5
0
5
0
5
g - гравитационное ускорение; (fa - амплитуда составляющей уг- лопого перемещения измерительной оси в вертикальной плоскости.
Выходной сигнал Е акселерометра 3 может быть представлен в виде
, .
где EJJ - составляющая сигнала линейного перемещения; составляющая сигнала углового перемещения.
После определения выходного сигнала Е, соответствующего заданным амплитуде Ха и частоте (О перемещения,
Ei i
акселерометр 3 снимают с платформы 2. Рабочую ось вибрационной установки поворачивают на угол п рад разворотом преобразователя 1 в вертикальной плоскости-вокруг горизонтальной оси 9 в стойках 6 на угол Я рад в направлении стрелки Б. В этом положении на платформу 2 устанавливают акселерометр 3, задают аналогичные амплитуду Ха и частоту О линейного перемещения и определяют выходной сигнал Е , который может быть представлен в виде
Е -E;-EJir.
Независимо от гравитационного поля Земли угловое перемещение платформы 2 обусловлено конструкторско-тех- нологическим несовершенством самого преобразователя 1: асимметрией магнитного и электрического узлов, их взаимного расположения относительно геометрической оси и неравножесткостью упргуих элементов в радиальных направлениях, перпендикулярных основному перемещению платформы.
В связи с тем, что жесткость упругой системы преобразователя ,1 в направлениях, перпендикулярных измерительной оси, обеспечивает в обоих положениях относительную неизменность поперечной и угловой составляющих перемещения платформы 2 в выходных сигналах Е и Е акселерометра, остаются неизменными по величине составляющие Е$ги Ejjrуглового перемещения, но по отношению к составляющей ВЦ линейного перемещения составляющая ЕЈ меняет знак.
Суммированием выходных сигналов, определенных для обоих положений рабочей оси вибрационной установки, представляется возможным методическим .путем исключить составляющую сигнала
от соответствующего ненормированного углового перемещения рабочей платформы 2 и соответственно рабочей оси вибрационной установки и измерительной оси акселерометра. Учитывая это, коэффициент преобразования акселерометра 3 по данным определениям выходного сигнала з обоих положениях может быть рассчитан согласно выражения
К
Еа+Еа
Снижение влияния имеющейся в выходном сигнале Е составляющей, определяемой изменением проекции вектора гравитационного поля Земли на измерительную ось за счет ее углового перемещения, на расчет коэффициента преобразования позволяет повысить точность градуировки акселерометра. Так как погрешность от углового пере метения в большей мере сказывается на нижнем пределе измерений, то снижение погрешности позволяет расширить диапазон градуировки за счет возможности уменьшения нижних пределов измерения и частот. Снижение погрешности методическим путем позволяет на имеющихся в эксплуатации установках повысить точность градуировки и расширить рабочий диапазон за счет уменьшения нижнего предела частот.
10
15
404Q/t
Формула изобретении.
Способ градуировки низкочастотных линейных акселерометров, зяключанттий- ся в креплении акселерометра к столу 5 вибрационной установки, задании горизонтальных перемещений стола пибря- ционной установки по гармоническому закону с нормированными амплитудой и частотой, измерении выходного сигнала и расчета коэффициента прробрячования акселерометра, отличаюший- с я тем, что, с целью повышения точности и расширения диапазона градуировки, до расчета коэффициента преобразования рабочую ось вибрационной установки поворачивают я вертикальной плоскости на угол If рад, повторно задают горизонтальные перемещения 20 с аналогичными амплитудой и частотой, измеряют выходной сигнал акселерометра, после этого рассчитывают коэффициент преобразования по формуле
к- Јai§a. 25 2Хо-«
где К - коэффициент преобразования акселерометра;
Е„ HEq - амплитуда выходного сигнала акселерометра соответственно до и после поворота рабочей оси вибрационной установки;
X и О - соответственно амплитуда и о
круговая частота гармонических0 перемещений акселерометра.
30
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ градуировки линейных акселерометров | 1984 |
|
SU1312489A1 |
| Способ градуировки вертикальных акселерометров | 1988 |
|
SU1569729A1 |
| Способ градуировки вертикальных акселерометров | 1989 |
|
SU1742734A1 |
| Способ градуировки линейных акселерометров | 1986 |
|
SU1531000A1 |
| Способ градуировки линейных акселерометров | 1986 |
|
SU1345122A1 |
| СПОСОБ ГРАДУИРОВКИ ПЪЕЗОЭЛЕКТРИЧЕСКОГО АКСЕЛЕРОМЕТРА НА НИЗКИХ ЧАСТОТАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2519833C2 |
| СПОСОБ ГРАДУИРОВКИ АКСЕЛЕРОМЕТРОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2165088C1 |
| Низкочастотный стенд для калибровки и испытаний акселерометров и сейсмоприемников | 2019 |
|
RU2757971C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ ПРИ ИСПЫТАНИЯХ НА УДАРНЫЕ И ВИБРАЦИОННЫЕ ВОЗДЕЙСТВИЯ | 2013 |
|
RU2545489C1 |
| Способ поверки гравиинерциальных приборов и устройство для его осуществления | 1990 |
|
SU1756844A1 |
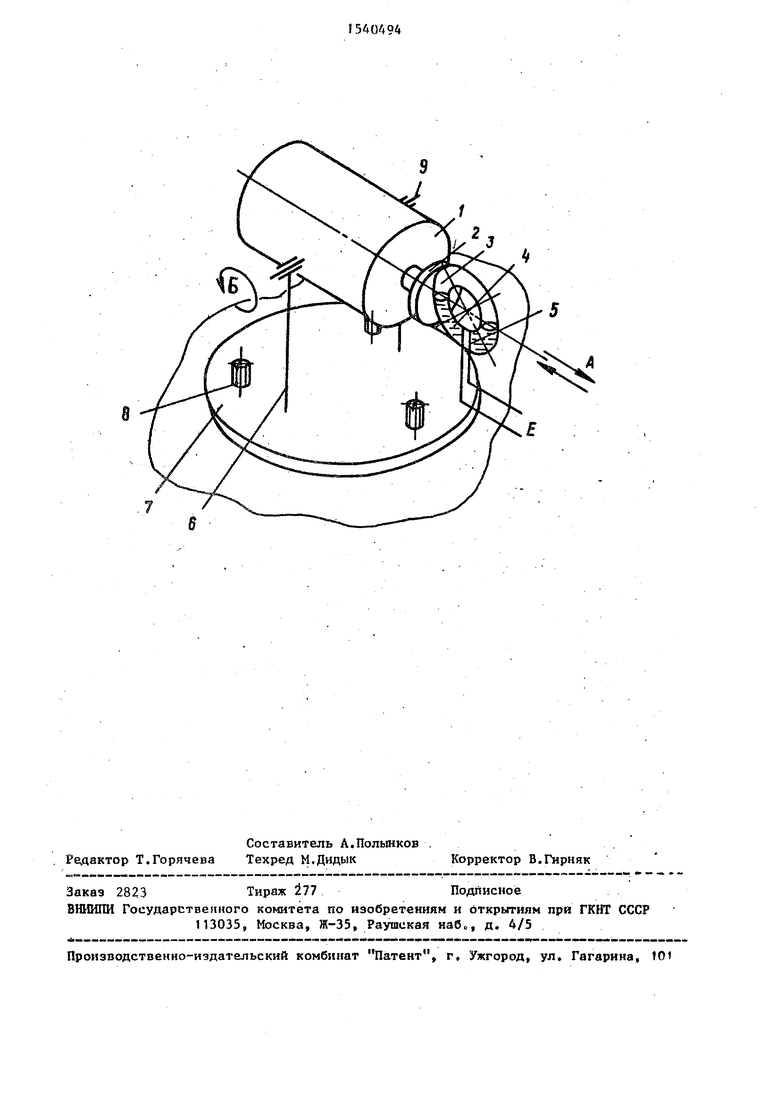
Изобретение относится к измерительной технике. Цель изобретения - повышение точности и расширение рабочего диапазона градуировки за счет нижнего предела. Способ включает задание горизонтального перемещения акселерометра по гармоническому закону в направлении измерительной оси Изобретение относится к измерительной технике для воспроизведения горизонтальной составляющей линейного ускорения при градуировке и поверке низкочастотных акселерометров. Цель изобретения - повышение точности и расширение диапазона градуировки за счет уменьшения нижнего предела диапазона частот. На чертеже изображена схема, иллюстрирующая предлагаемый способ. Способ реализован с помощью вибрационной установки, содержащей пре-| образоаатель 1 электрического тока в с нормированными амплитудой и частотой, воспроизводимыми вибрационной установкой, измерение выходного сигнала, поворот рабочей оси установки в вертикальной плоскости на угол 1Г рад, дополнительное задание перемещения с аналогичными амплитудой и частотой, расчет коэффициента преобразования с использованием данных измерений в обеих положениях по фор- I F +F муле К , где К - коэффициент XQ U) преобразования акселерометра; Eg и Еа - амплитуда выходного сигнала в первом и втором положениях; XQ и Q - амплитуда и круговая частота. Снижение погрешности достигнуто путем методического исключения из результатов составляющей, вызванной угловыми перемещениями рабочей оси вибрационной установки, независимыми от гравитационного поля Земли. 1 ил. соответствующее линейное перемещение платформы 2. Рабочая ось вибрационной установки, направление которой показано стрелками А, имеет горизонтальную ориентацию. На платформе 2 закреплен в рабочем положении низкочастотный акселерометр 3 горизонтальной составляющей линейного ускорения, выполненный в виде стеклянного тора, заполненного до уровня диаметра рабочей жидкостью 4, в которой размещена система электродов 5, преобразующая объемную скорость жидкости в эквиi СЛ ел Јь О 4, со 4
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Виброметрия | |||
| М.: Машиностроение, 19b3, с | |||
| ПНЕВМАТИЧЕСКИЙ ДВИГАТЕЛЬ | 1923 |
|
SU627A1 |
