Известны следящие системы для отработки сигналов постоянного тока, содержащие преобразователь постоянного тока в переменный, усилитель мощности переменного тока, исполнительный двигатель и датчик обратной связи.
В предлагаемой следящей системе cTiaiOpная обмотка сельсина-датчика и обмотка питания магнитного модулятора включены последовательно, а обмотка ротора сельсина подключена в рассечку на выход модулятора. Эти отличия позволяют упростить следящую систему и повысить ее надежность.
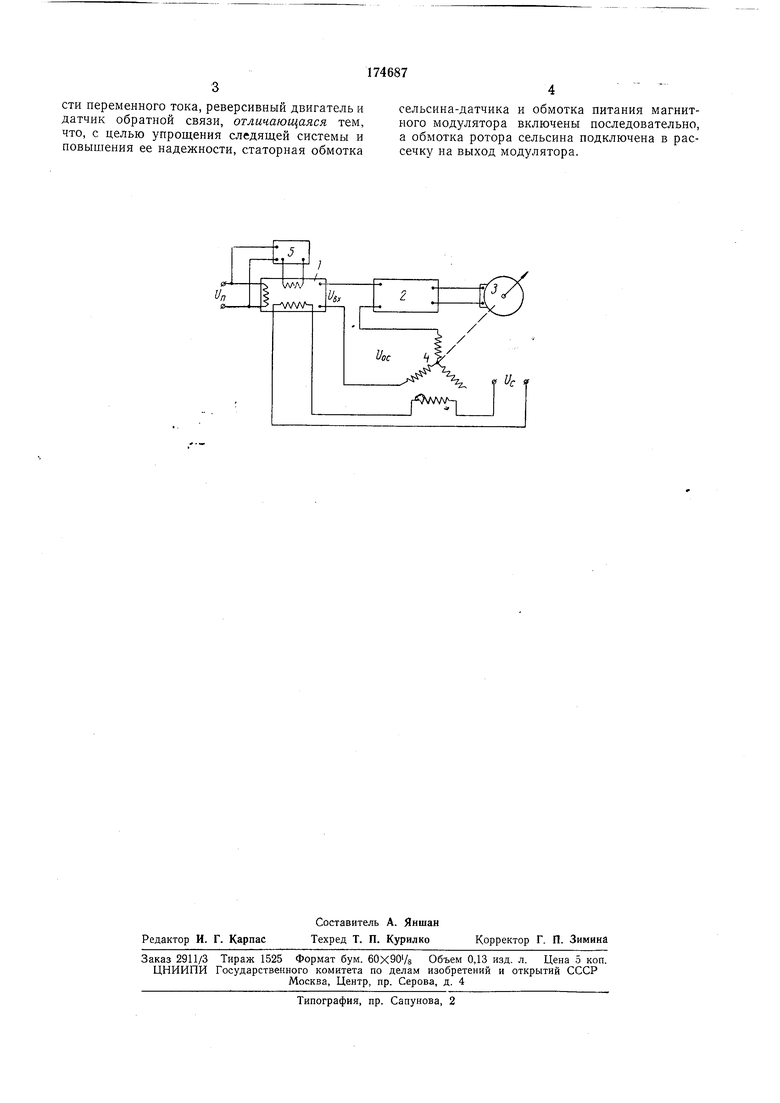
На чертеже изображена схема следящей системы.
Она состоит из магнитного модулятора /, усилителя мощности 2, реверсивного исполнительного двигателя 3, бесконтактного сельси:на 4 и функционального блока 5.
Измеряемый сигнал постоянного тока И лоступает на обмотку управления двухтактного магнитного модулятора / и преобразуется в пропорциональное ему напряжение переменного тока t/Bx Магнитный модулятор получает также питание от сети переменного тока t/c- Поскольку он выполнен по двухтактной схеме и работает при пониженном значении переменной индукции и сердечнике из насыщенного материала, форма кривой ( будет синусоидальной, а амплитуда будет линейной
функцией не только измеряемого сигнала постоянного тока Un, но и напряжения питающей сети /7 с .
Переменный электрический сигнал U. поступает на усилитель мощности переменного тока 2, а затем на реверсивный исполнительный двигатель 3. Вал двигателя жестко связан с валом бесконтактного сельсина 4 и со стрелкой устройства регистрации показаний. При
повороте вала сельсина напряжение на одной
фазе его роторной обмотки Uf,c изменяется
практически линейно и используется в качестве
сигнала обратной связи.
Поскольку сигналы (/„х и t/oc линейно
зависят от напряжения питающей сети U, то их разность (/вх , то есть сигнал рассогласования следящей системы, не будет зависеть от изменений U, будет оставаться неизменным н стремиться к нулю.
Функциональный блок 5 служит для выделения коррекции в модулятор при нелинейных характеристиках сельсина.
Система быть использована в устройствах регулирования и контроля.
Предмет изобретения
Следящая система для отработки сигналов
сти переменного тока, реверсивный двигатель и датчик обратной связи, отличающаяся тем, что, с целью упрощения следящей системы и повышения ее надежности, статорная обмотка
сельсина-датчика и обмотка питания магнитного модулятора включены последовательно, а обмотка ротора сельсина подключена в рассечку на выход модулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДВУХСКОРОСТНОЙ СЛЕДЯЩИЙ ПРИВОД | 1969 |
|
SU233870A1 |
| Следящий вентильный электропривод | 1982 |
|
SU1241400A1 |
| Следящая система | 1982 |
|
SU1179264A1 |
| Силовой следящий электропривод для управления угловым положением объекта | 1962 |
|
SU152011A1 |
| ОРГРЭС Государственного производственного комитета по энергетике и электрификации СССР | 1966 |
|
SU184744A1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА | 2012 |
|
RU2482596C1 |
| АВТОКОМПЕНСАЦИОННОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ | 1973 |
|
SU373633A1 |
| Следящая система | 1972 |
|
SU447679A1 |
| А. И. Свиридова, Л. Л. Иванова, С. В. Лавров, А. С. Л'1ашницкий н А. 3. Страшун | 1971 |
|
SU293310A1 |
| БЕСКОНТАКТНЫЙ ПОЗИЦИОНЕРБ№^1Ш7?лЛ | 1967 |
|
SU192273A1 |