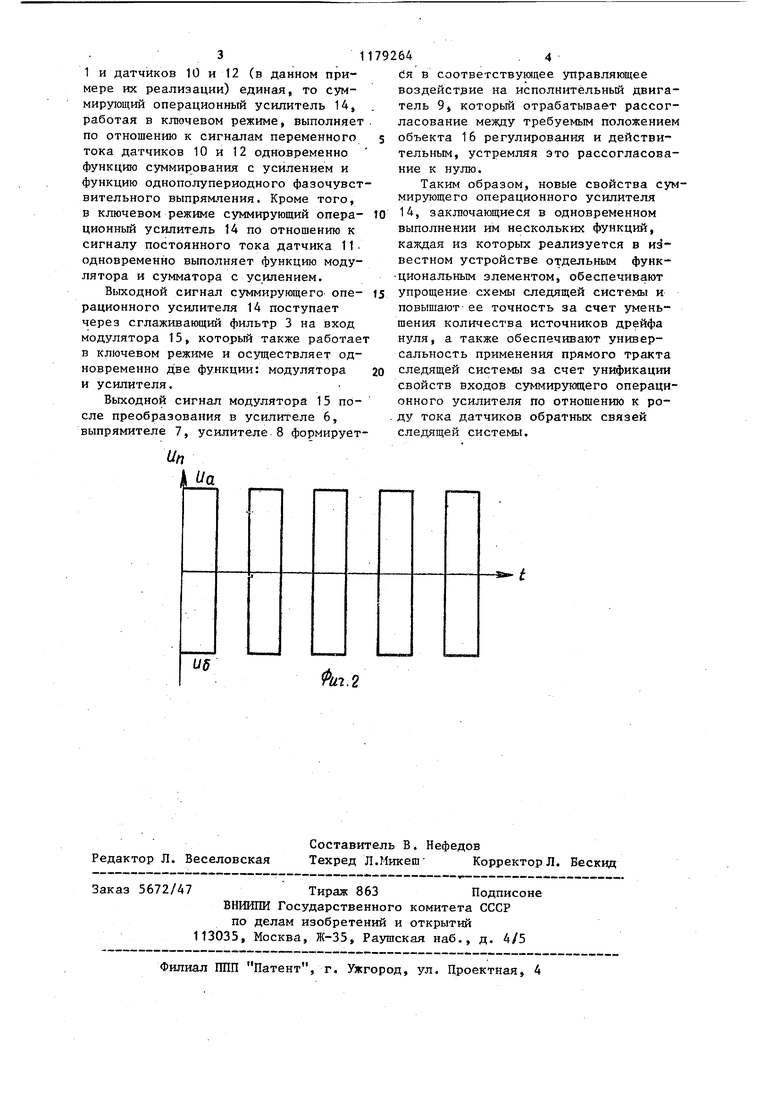
Изобретение относится к системам автоматического регулирования углового положения тел в пространстве и может быть использовано, в частности, для наведения оптических и радио астрономических инструментов. Целью изобретения является обеспе чение универсальности применения пря мого тракта следящей системы путем его унификации по отношению к, типу (по роду электрического тока) датчиков обратных связей, упрощение схеМз и повышение точности следящей системы. На фиг. 1 изображена функциональная блок-схема следящей системы; на фиг. 2 - диаграмма напряжений на полюсах источника .двуполярного импульсного напряжения. На фиг. 1 изображены усилители 1 н 2 постоянного трка, сглаживающий фильтр 3, масщтабные резисторы 4, источник 5 двуполярных импульсных напряжений со скважностью импульсов, равной двум, усилитель 6 переменного тока, фазочувствительный выпрямитель 7, усилитель 8 мощности, исполнитель ный электрический двигатель 9, датчик 10 угловой скорости, датчик 11 углового ускорения, датчик 12 углово го рассогласования, редуктор 13, суммирующий операционныйусилитель 1 модулятор 15, объект 16 регулировани На-фиг. 2 обозначено: Од, 1 - на ряжения соответственно на положитель ном и отрицательном полюсах источника двуполярного импульсного напряжения; t - текущее время. Последовательное соединение блоков 14, 15, 6, 7, 8,9 и 13 является прямым трактом передачи сигналов в следящей системе. Модулятор 15 и суммирующий операционный усилитель 14 построены на базе усилителей 1 и 2 постоянного TO ка, охваченных резистивной отрицател ной обратной связью, причем вход уси лителя 1 подключен к выходам датчиков углового рассогласования М2, угловой скорости 10, углового ускорения 11 через масштабные резисторы 4 Сглаживающийфильтр 3 может быть выполнен, например, в виде интегрирующей КС-цепи. Датчики 10-12 включены в обратнг ге связи следящей системы и любой из Hint может быть выполнен как на постоянном, так и на переменном токе, при этом схема прямого тракта следящей.системы остается неизменной, т.е. является унифицированной по отношению к типу (по роду тока) датчиков. Например, датчик 10 угловой скорости может быть выполнен в виде электрического генератора переменного тока, амплитуда которого пропорциональна угловой скорости вращения вала генератора. Датчик 12 углового рассогласования может быть выполнен, например, в виде сельсинной пары, соединенной между собой электрически по дифференциальной схеме, при этом его выходной сигнал является сигналом переменного тока, амплитуда напряжения которого пропорциональна угловому рассогласованию. Датчик 11 углового ускорения может быть выполнен, например, в виде датчика тока, подключенного к якорной цепи исполнительного электрического двигателя 9, при этом величина измеряемого тока с достаточной степенью точности характеризует угловое ускорение ротора исполнительного электрического двигателя 9. Датчики 10 и 11 работают на переменном токе и для достижения цели изобретения частота напряжения их питания должна быть равна частоте сети питания источника 5 двуполярных импульсных напряжений. В частном случае для реализации данного признака питание датчиков 10 и 12 и источника 5 может производиться от единой сети, например, 400 Гц. Следящая система работает следующим образом. Сигналы датчиков 10-12 суммируются суммирующим операционным усилителем 14 в течение интервалов времени, когда напряжения U, Ug на полюсах источника 5 двуполярного импульсного напряжения не равны нулю. В противном случае напряжение на входе питания усилителя 1 равно нулю, поэтому напряжение на выходе усилителя 1 также равно нулю. Интервалы времени, в которые напряжения Ug, Ug не равны нулю, чередуются с интервалами времени, когда эти напряжения равны нулю (см. фиг. 2), поэтому усилитель 1 будет по существу работать в ключевом режиме. Поскольку частота питания усилителя 31 1 и датчиков 10 и 12 (в данном примере их реализации) единая, то суммирующий операционный усилитель 14, работая в ключевом режиме, выполняет по отношению к сигналам переменного тока датчиков 10 и 12 одновременно функцию суммирования с усилением и функцию однополупериодного фазочувст вительного выпрямления. Кроме того, в ключевом режиме суммирующий операционный усилитель 14 по отношению к сигналу постоянного тока датчика 11. одновременно выполняет функцию модулятора и сумматора с усилением. Выходной сигнал суммирующего операционного усилителя 14 поступает через сглаживающий фильтр 3 на вход модулятора 15, который также работае в ключевом режиме и осуществляет одновременно две функции: модулятора и усилителя. Выходной сигнал модулятора 15 после преобразования в усилителе 6, выпрямителе 7, усилителе 8 формирует 64. 4 Ся в соответствую цее управляющее воздейстрие на исполнительный двигатель 9 который отрабатывает рассогласование между требуемым положением объекта 16 регулирования и действительным, устремляя это рассогласование к нулю. Таким образом, новые свойства суммирующего операционного усилителя 14, заключающиеся в одновременном выполнении им нескольких функций, каждая из которых реализуется в известном устройстве отдельным функциональным элементом, обеспечивают упрощение схемы следящей системы и повышают-ее точность за счет уменьшения количества источников дрейфа нуля, а также обеспечивают универсальность применения прямого тракта следящей системы за счет унификации свойств входов суммирующего операционного усилителя по отношению к роду тока датчиков обратных связей следящей системы.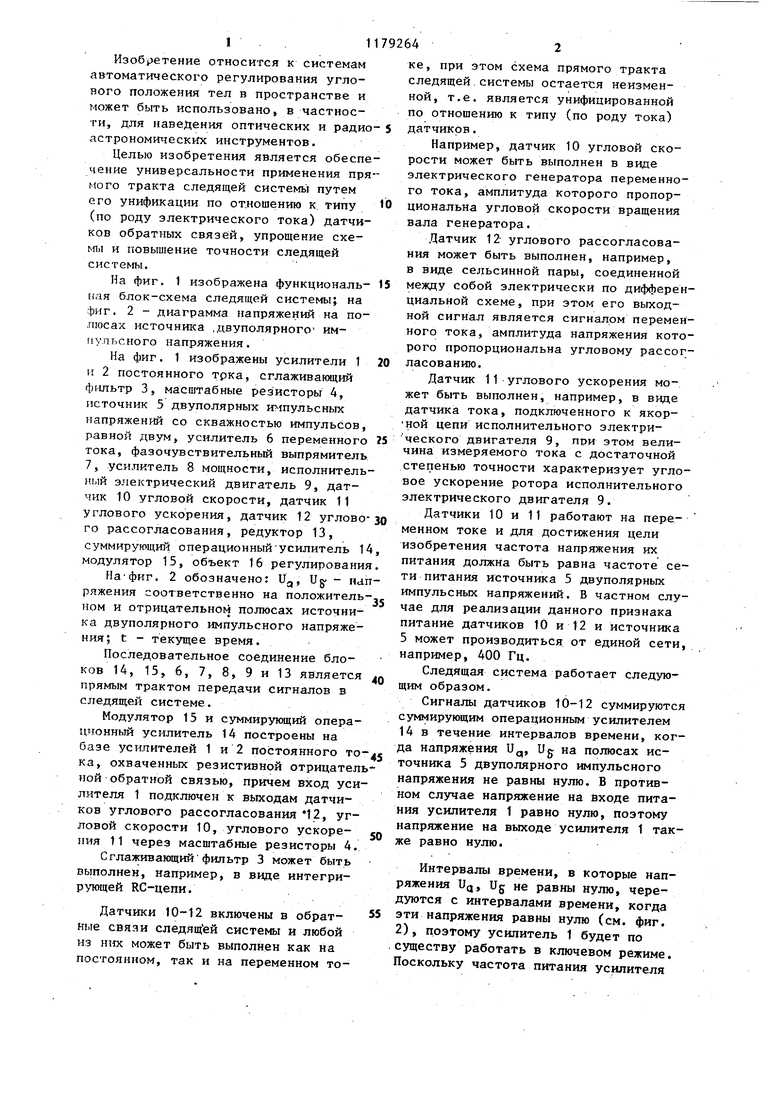
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод | 1980 |
|
SU974333A1 |
| Следящий привод | 1985 |
|
SU1270745A1 |
| Следящая система | 1983 |
|
SU1120280A1 |
| ФАЗОВАЯ СЛЕДЯЩАЯ СИСТЕМА С КОМБИНИРОВАННЫМ | 1971 |
|
SU318016A1 |
| Следящая система | 1978 |
|
SU746408A1 |
| Следящая система | 1978 |
|
SU752224A1 |
| Электропривод переменного тока | 1988 |
|
SU1767689A1 |
| Следящий привод | 1983 |
|
SU1136105A1 |
| Следящий вентильный электропривод | 1982 |
|
SU1241400A1 |
| Устройство для управления разворотами радиотелескопа | 1979 |
|
SU930229A1 |
СЛЕДЯЩАЯ СИСТЕМА, содержащая датчик угловой скорости, датчик углового ускорения и последовательно : соединенные сглалашающий фютьтр, модулятор, усилитель переменного тока, фазочувствительный выпрямитель, усилитель мощности, исполнительный двигатель, редуктор и датчик углового рассогласования, причем исполнительный двигатель подключен первым выходом К входу датчика угловой скорости. Ч 1 П fS /za / L-Y-VNjj-v-y-O L |Cr:V j СегТ а вторым выходом - к входу датчика углового ускорения, отличающаяся тем, что, с целью обеспечения универсальности применения прямого тракта следящей системы путем его унификации по отношению к типу (по роду электрического тдка) датчшсов обратных связей, упрощения схемы и повышенкя точности следящей системы, она содержит суммирующий операционный усилитель, подключенный выходом к входу сглаживающего фильтра, первым входом - к выходу датчика углового рассогласования, вторым вхо§ дом - к выходу датчика угловой скорости, а третьим входом - к выходу датчика углового ускорения, источник двуполярньк импульсных напряжений со скважностью импульсов, равной двум, подключенный нулевой точкой к второму входу сглаживающего фильтра, а полюсами - к входам питания модулятора и суммирующего операционного усилителя. ipus.l
us
Фи1.2
| Блейз Е.С | |||
| и др | |||
| Динамика электромашинных следящих систем | |||
| М.: Энергия, 1967, с | |||
| Способ изготовления замочных ключей с отверстием для замочного шпенька из одной болванки с помощью штамповки и протяжки | 1922 |
|
SU221A1 |
| Следящие приводы | |||
| Под ред | |||
| Б.К | |||
| Чемоданова | |||
| Книга вторая | |||
| М.: Энергия, 1976, с | |||
| Рельсовый башмак | 1921 |
|
SU166A1 |
