Изобретение относится к точному ма- шино- и приборостроению и может быть использовано при эксплуатации устройств с подвижным элементом, поддерживаемым, например, радиальной гэзостатической опо рой (пиевмоподвесом).
Известен способ подготовки к работе гибрмдной опоры скольжения с поворотным вкладышем, включающий подачу смазки в рабочий зазор и установку вкладыша по отношению к нагрузке при минимальной температуре смазки.
Известен способ регулирования работы гибридной опоры скольжения, в которой при определении действия нагрузки вкладыш также поворачивают, измеряя при этом мощность, затраченную на вращение вала, и фиксируют в положении, соответствующем минимуму затрачиваемой мощности.
Применение этих способов для определения параметров нагрузки газостатических опорах неприемлемо, так как у этих опор потери на трение «в 103 раз меньше, чем у опор с жидкой смазкой.
Наиболее близким к предлагаемому является способ определения радиальной симметричной нагрузки, включающий подачу газа в рабочий зазор, измерение минимального (максимального) значения упомянутого зазора, определение вектора радиального смещения продольной оси вала по отношению к продольной оси втулки опоры и значения радиальной нагрузки.
Недостатком указанного способа является невозможность определения параметров несимметричной нагрузки (радиальной и момента перекоса).
Целью изобретения является повышение точности определения параметров нагрузки и улучшения эксплуатационных качеств тихоходных и невращающихся радиальных газостатических опор.
Поставленная цель достигается тем, что в известном способе определения вектора радиальной симметричной нагрузки, заключающемся в подаче газа в рабочий зазор и измерении минимального (максимального) значения зазора, измеряют минимальные
СО
С
xg N
(максимальные) зазоры на противоположных торцах опоры, определение векторов радиальных смещений продольной оси вала осуществляется на противоположных торцах опоры и в средней части опоры и по полученным данным осуществляют геометрическое построение векторов радиальной нагрузки и момента,
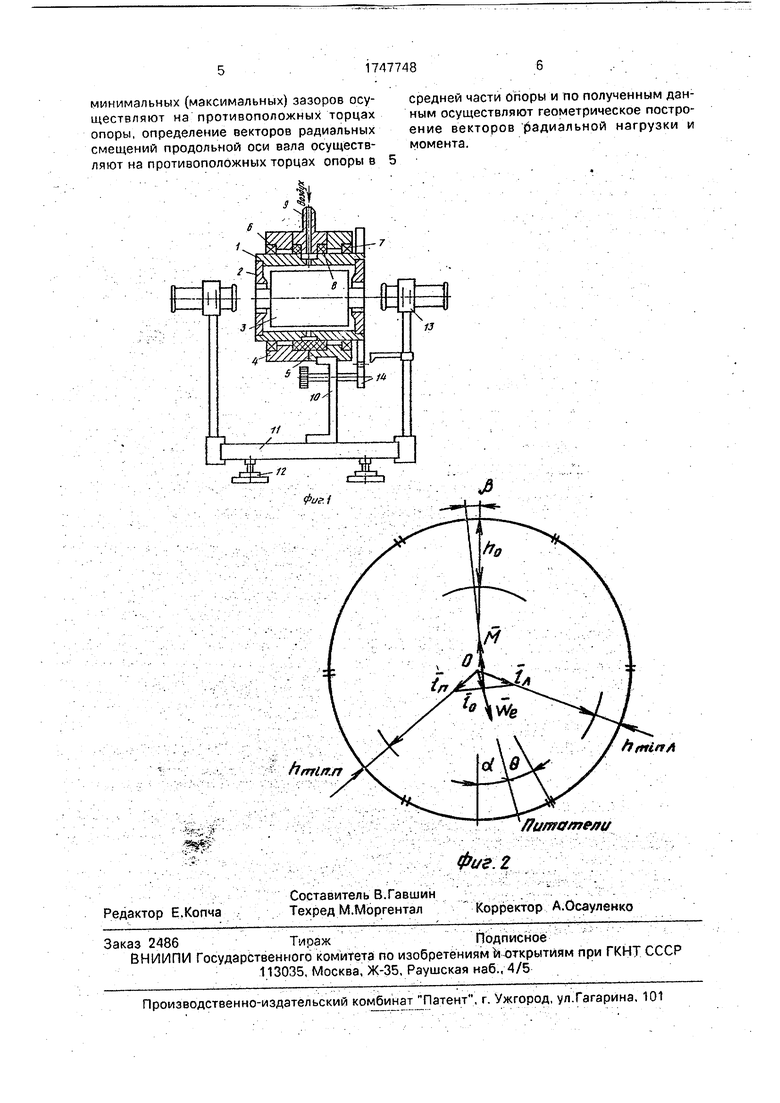
На фиг, 1 изображена схема устройства, с помощью которого осуществлялась экспериментальная проверка предлагаемого способа; на фиг.2 - направления и значения векторов,
В газостатическую радиально-торцо- вую опору, состоящую из втулки 1 и подшипников 2, помещается вал 3. Втулка 1 устанавливается в сборную обойму, состоящую из двух, соединенных между собой, кеяец 4 и 5 и содержащую шарикоподшипники 6 и 7, уплотнительное кольцо 8 и штуцер 9, служащий для подвода воздуха. .Обойма с помощью стойки 10 устанавливается на платформу 11, снабженную регулировочными винтами 12. К платформе креп ,.ся два оптических устройства 13, с помощью которых определяется относительное положение вала 3 (измеряются минимальные или максимальные зазоры на торцах опоры). Втулка 1 также может занимать различные относительные положения, поворачиваясь с помощью передачи 14 в шарикоподшипниках 6 и 7. Эти положения контролируются фиксатором.
Устройство работает следующим образом.
При подаче в опору воздуха вал 3 занимает определенное положение, зависящее от направления и вида внешней нагрузки, которая осуществлялась действием на вал установленных определенным образом электромагнитов (не показаны). Если действует только радиальная нагрузка, то измеренные минимальные (максимальные) зазоры на противоположных торцах опоры будут находиться в одной плоскости с линией действия нагрузки, При действии на вал комбинированной нагрузки - радиальной, и момента переноса измеренные на противоположных торцах минимальные (максимальные) рабочие зазоры находятся в разных плоскостях. Принимая за центр приведения главного вектора и главного момента внешних сил центр симметрии вала и независимость согласно линейной теории радиального перемещения и углового отклонения, определяем геометрически, как показано на фиг.2, направления и значения векторов радиального (поступательно) и углового смещения вала, а соответственно, направления главного вектора (радиальной
нагрузки) и главного момента (момента перекоса) внешних сил. v На фиг.2 обозначено:
&+&,
- вектор радиального смещения
eanaj
In; L - вектор радиального смещения соответственно правого торца и левого торца опоры;
/Ui/ По - Г1мин, I Ел/ ho - Г1ммн,
где ho средний радиальный зазор при концентричном положении вапа:
Ьмин п{л) соответственно минимальный зазор правого, и левого торцов опоры;
5IU-U
у -;угол переноса вала;
L -длина вала;
углы направления радиальной (We) и моментной (М) нагрузок.
0 Проведена экспериментальная проверка способа на однорядном радиальном пневмоподвесе со следующими параметрами: L/D 1; D 4-10 м; питатели - кольцевые диафрагмы N 6; d м; h0 32
5 мкм; PS 1,08-10 Н/м Расчеты коэффици- ентов эадиальной и угловой жесткости Ке 1,5 10°Н/м; Нм, Экспериментальные значения параметров нагрузки составили соответственно: We 1,8 Н; М 0,1 нм.
0 Далее с помощью передачи 14 поворачиваем втулку на угол так, чтобы ось питателя и найденная линия действия радиальной нагрузки находились в одной продольной симметрии. При таком расположении питателя
5 несущая способность опоры увеличивается 10-15%, т.е. то же значение радиального смещения вала достигается при болешой нагрузке, равной расчетной We 2 Н, а следовательно, улучшаются эксплуатационные
0 качества опоры.
Предлагаемый способ позволяет также построить векторные диаграммы смещения вала и выбрать наиболее оптимальный режим работы опоры.
5 Фор мула изобретения
Способ определения параметров нагрузки в радиальных газостатических опорах, включающий подачу газа в рабочий зазор, измерение минимального (макси0 мального) значения упомянутого зазора, определение вектора радиального смещения продольной оси вала по отношению к продольной оси втулки опоры и радиальной нагрузки, сличающийся тем, что, с целью
5 повышения точности определения при воздействии несимметричной относительно середины опоры нагрузки в тихоходных и невращающихся опорах и улучшения эксплуатационных качеств опоры, измерение
минимальных (максимальных) зазоров осуществляют на противоположных торцах опоры, определение векторов радиальных смещений продольной оси вала осуществляют на противоположных торцах опоры в
средней части опоры и по полученным данным осуществляют геометрическое построение векторов радиальной нагрузки и момента.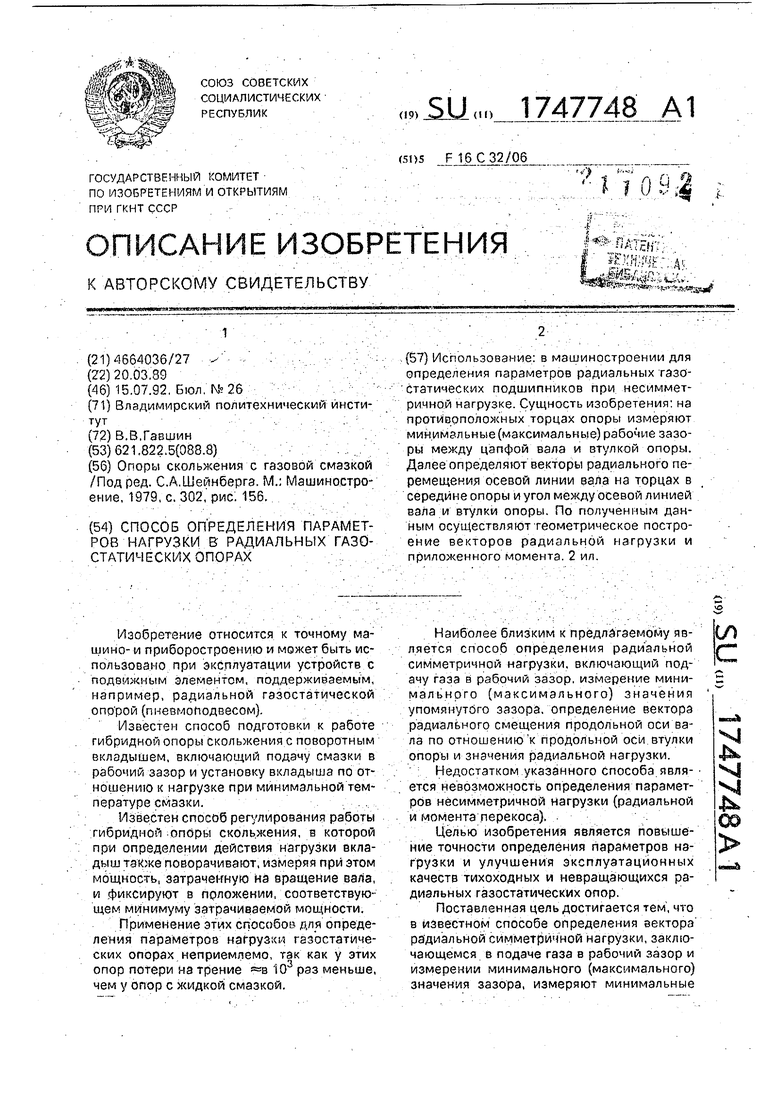
| название | год | авторы | номер документа |
|---|---|---|---|
| ГАЗОСТАТИЧЕСКИЙ ПОДШИПНИК | 2006 |
|
RU2299360C1 |
| Способ получения динамических характеристик опор скольжения и стенд для его осуществления | 1989 |
|
SU1746242A1 |
| УПЛОТНЕНИЕ МАНЖЕТНОГО ТИПА ДЛЯ ГЕРМЕТИЗАЦИИ ВРАЩАЮЩЕГОСЯ ВАЛА | 1995 |
|
RU2107206C1 |
| СПОСОБ РАБОТЫ ЭЛЕКТРОПРИВОДА С ТРЕХСТУПЕНЧАТЫМ ПЛАНЕТАРНЫМ РЕДУКТОРОМ | 2011 |
|
RU2478853C2 |
| ЭЛЕКТРОПРИВОД С ТРЕХСТУПЕНЧАТЫМ ПЛАНЕТАРНЫМ РЕДУКТОРОМ | 2011 |
|
RU2478849C2 |
| Радиально-упорный подшипниковый узел | 2021 |
|
RU2771991C1 |
| ПНЕВМАТИЧЕСКИЙ ШЛИФОВАЛЬНЫЙ ИНСТРУМЕНТ | 1996 |
|
RU2113969C1 |
| Радиально-упорный подшипниковый узел | 2021 |
|
RU2771989C1 |
| Радиально-упорный подшипниковый узел | 2021 |
|
RU2771999C1 |
| СПОСОБ КОМПЛЕКТОВАНИЯ МНОГООПОРНОГО УЗЛА ПОДДЕРЖКИ КОЛЕНЧАТОГО ВАЛА | 2011 |
|
RU2469219C1 |
Использование: в машиностроении для определения параметров радиальных газостатических подшипников при несимметричной нагрузке. Сущность изобретения: на противоположных торцах опоры измеряют минимальные (максимальные) рабочие зазоры между цапфой вала и втулкой опоры. Далее определяют векторы радиального перемещения осевой линии вала на торцах в середине опоры и угол между осевой линией вала и втулки опоры. По полученным данным осуществляют геометрическое построение векторов радиальной нагрузки и приложенного момента. 2 ил.
&0
flmlrr.n
htninA
flufftame/w
| Опоры скольжения с газовой смазкой /Под ред | |||
| С.А.Шейнбергз | |||
| М.: Машиностроение, 1979, с | |||
| Дровопильное устройство | 1921 |
|
SU302A1 |
| Упругое экипажное колесо | 1918 |
|
SU156A1 |
