Изобретение относится к приводам, предназначенным для создания продольного усилия, а более конкретно к винтовым приводам с продольным перемещением рабочего органа.
Известное приводное устройство, содержащее корпус с парой винт - гайка, внутри которой размещен узел регулирования хода, выполненный в виде втулки, внутри которой перемещается вал с опорой-ограничителем при этом на торце втулки крепится микровыключатель,
Недостатком данного технического решения является низкая, надежность кон струкции, связанная с наличием электриче ски исполнительных элементов - концевых в кпючателей и элементов, непосредственно действующих на них.
Наиболее близким к предлагаемому техническим решением, выбранным в качестве прототипа, является винтовой привод содержащий корпус с направляющей, установлен в ней шток, винт, размещенный коаксиально штоку, взаимодействующую с винте гайку и электродвигатель, установ- л°нный на подшипниках и кинематически С-язанный с винтом.
Недостатком данного технического PVJJCHMP является низкая надежность кон- , связанная с наличием электрических исполнительных элементов - концевых выключателей и элементов, непосредственно действующих на них Кроме того, низкая надежность указанной конструкции связана с установкой подшипниковой опоры винта подвижно в подпружиненной втулке что приводит к несанкционированному отключению привода при передаче продольного сжимающего усилия.
Цель изобретения - повышение надежности конструкции.
Указанная цель достигается тем, что в винтовом механизме, содержащем корпус с направляющей, установленные в ней шток, винт, размещенный коаксиально штоку, взаимодействующую с винтом гайку и привод, вал которого кинематически связан с винтом, в винте выполнено глухое осевое отверстие, при этом кинематическая связь вала привода с винтом выполнена в виде шлицевого участка на наружной поверхности вала привода, длина которого равна высоте гайки, и пружины растяжения, установленной в этом отверстии, один конец которой закреплен на шлицевом участке, другой - на дне отверстия.
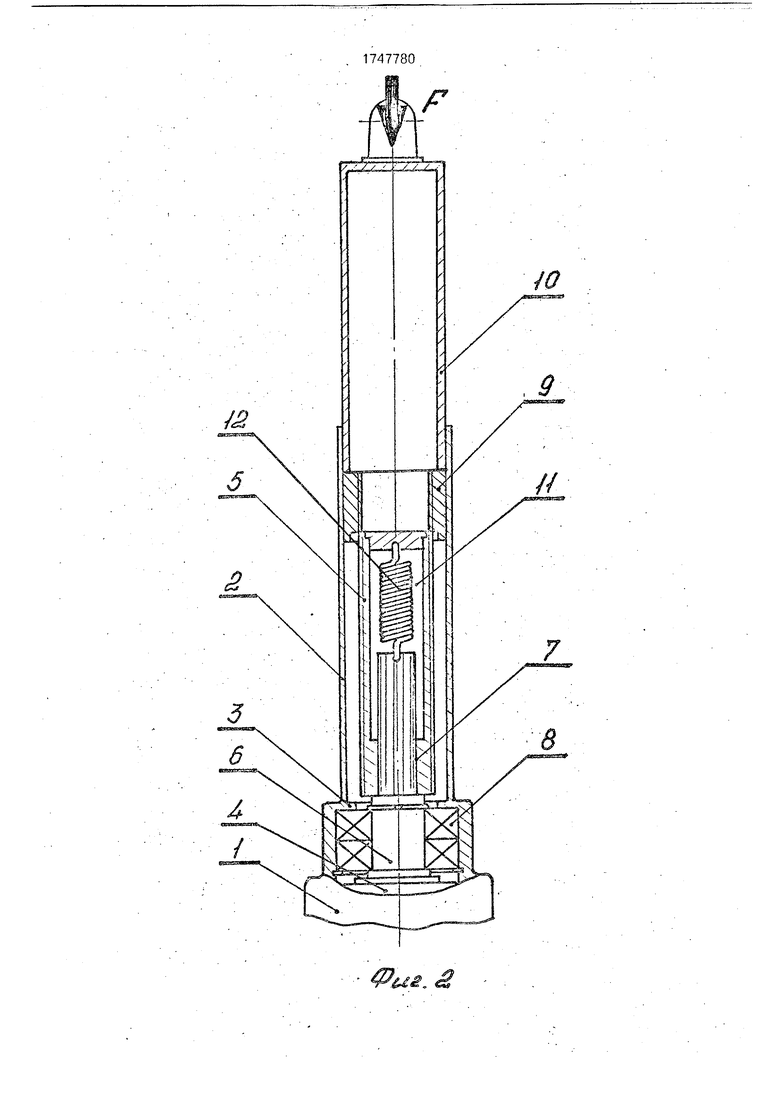
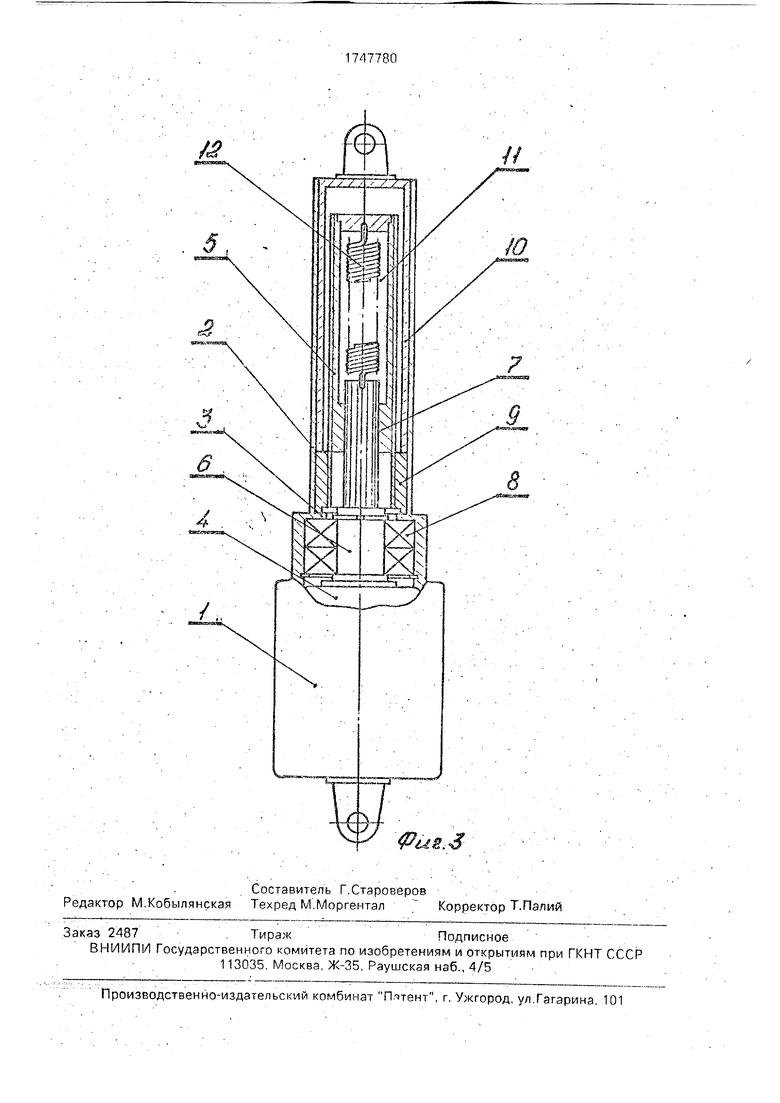
На фиг.1 изображен винтовой механизм; на фиг.2 - то же, в крайнем выдвинутом положении1 на фиг 3 - то же, в крайнем положении.
Представленный на фиг 1 винтовой механизм содержит корпус 1 с направляющей
2 и упором 3, привод 4 вращения, установленный в корпусе 1, винт 5, установленный в корпусе 1 и соединенный с валом 6 приво- да 4 вращения При этом вал 6 с помощью шлицевого участка 7 соединен с винтом 5, а
через подшипники 8 - с корпусом 1. Гайка 9 закреплена на конце штока 10 и взаимодействует с винтом 5, в котором выполнено осевое глухое отверстие 11 В отверстии 11 винта установлена пружина 12 растяжения
соединенная одним концом со шлицевым участком 7.
Винтовой механизм работает следующим образом.
После включения привода 4 вращения
крутящий момент через шлицевой участок 7 передается на винт 5 Гайка 9 начинает перемещаться вдоль винта 5 При этом пере- дэча усилия производится через шток 10 и гайку 9 на винт 5, а через упор 3 - на корпус
1 Гайка 9 перемещается вдоль винта 5 до тех пор пока не сойдет с него При переключении привода 4 вращения на противоположное вращение гайка 9 под действием усилия нагрузки входит в зацепление с винтом 5 и перемещается вдоль него. После стопорения гайки 9 на упоре 3 начинается вкручивание винта 5 в гайку 9 и перемещение его вдоль шлицевого участка 7 вала б до схода винта 5 с гайки 9. При этом растяжение пружины 12 способствует созданию первоначального усилия для зацепления вичта 5 с гайкой 9 при переключении привода вращения на первоначальное
40
Формула изобретения
Винтовой механизм, содержащий корпус с направляющей, установленные в ней шток, винт, размещенный коаксиально штоку, взаимодействующую с винтом гайку и привод, вал которого кинематически связан с винтом, отличающийся тем, что, с целью повышения надежности, длина штока превышает длину винта, в винте
выполнено глухое осевое отверстие, а кинематическая связь вала привода с винтом выполнена в виде шлицевого участка на наружной поверхности вала привода, длина которого равна высоте гайки, и пружины
растяжения, установленной в отверстии винта, один конец которой жестко закреплен на шлицевом участке, а другой - на дне отверстия.
ФиВ.З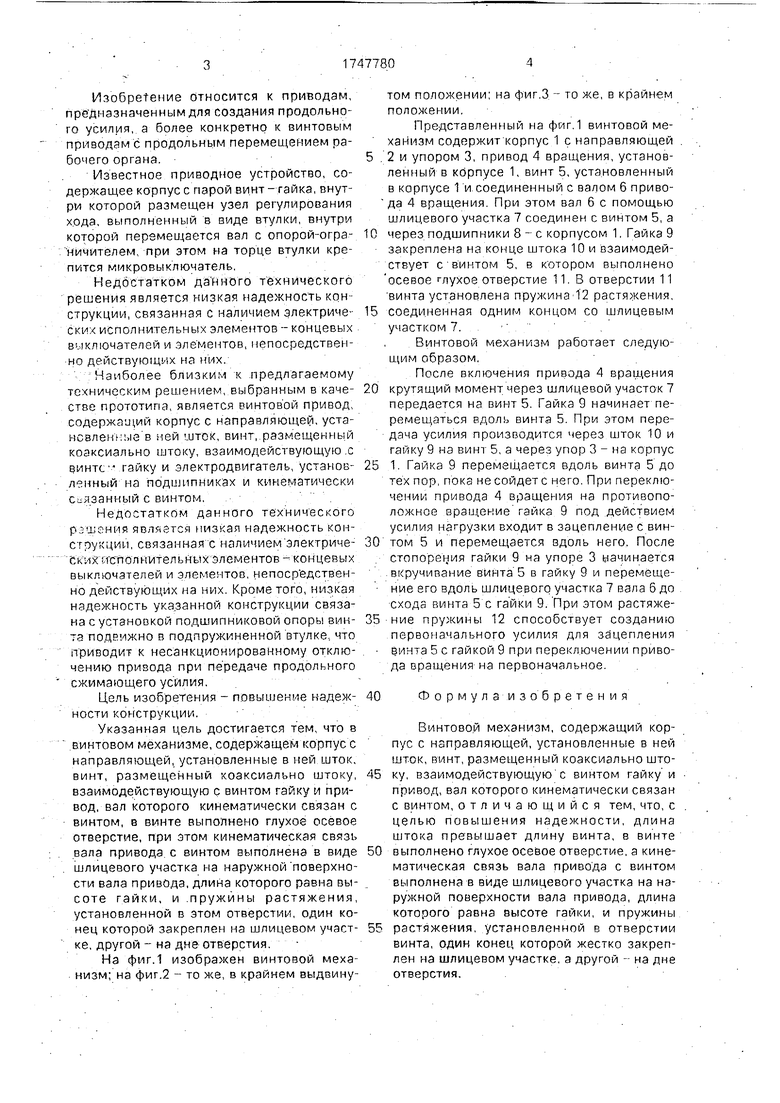
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перекрытия трубопровода | 1977 |
|
SU750212A1 |
| ЗАПОРНОЕ УСТРОЙСТВО ДЛЯ ПЕРЕКРЫТИЯ КАНАЛА ГОРЯЧЕЙ КАМЕРЫ | 2005 |
|
RU2288395C1 |
| Транспортное средство | 1989 |
|
SU1784018A3 |
| Стояночный тормоз заднего колеса с механизмом перемещения колодок и суппортом заднего тормоза | 2023 |
|
RU2830014C1 |
| ПЕРЕНОСНАЯ СВЕРЛИЛЬНАЯ ГОЛОВКА | 1990 |
|
SU1792014A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
| АВТОМАТИЧЕСКИЙ РЕГУЛИРОВОЧНЫЙ РЫЧАГ | 2004 |
|
RU2282072C2 |
| Устройство для фрезерования внутренней резьбы | 1988 |
|
SU1558586A1 |
| Сверлильная машина | 1981 |
|
SU975237A1 |
| Устройство для закладки самосмазывающегося материала в подшипник качения | 1987 |
|
SU1448161A1 |
Изобретение относится к машиностроению и может быть использовано для преобразования движения как винтовой механизм Цель изобретения - повышение надежности Это достигается за счет выполнения кинематической связи вала привода с винтом в виде шлицевого участка 7 на внешней цилиндрической поверхности вала и пружины 12, установленной в отверстии винта и закрепленной своими концами соответственно на валу и дне отверстия. Крутящий момент через шлицы 7 передается на винт 5, при этом гайка 9 начинает перемещаться вдоль винта 5, а передача усилия производится через шток 10 и гайку 9 на винт, а через упор - на корпус 1. 3 ил. 11 (Л XI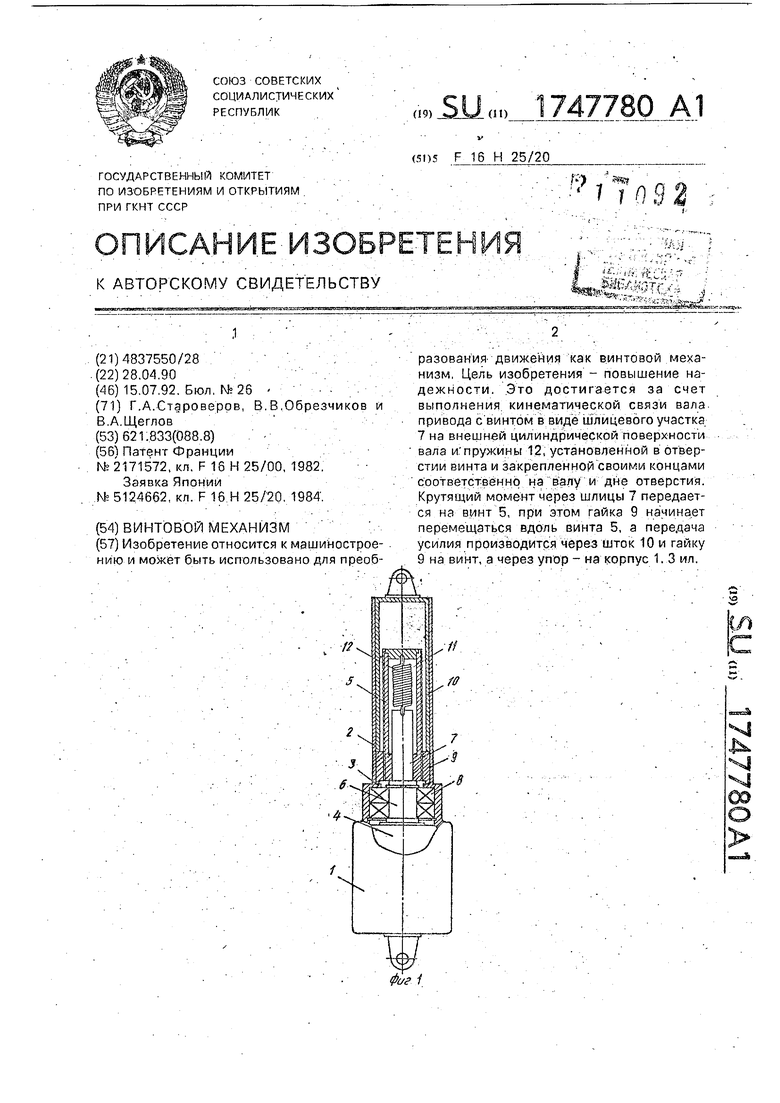
| СПОСОБ ВЫРАЩИВАНИЯ МОЛОДИ РЫБ В ПРУДАХ | 1999 |
|
RU2171572C2 |
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
