рическую поверхность на малом ее участке. В отраженном цилиндрической поверхностью пучке формируют ее изображение и определяют его продольную ширину. Из ширины изображения определяют расположение цилиндрической поверхности и ее диаметр.
Однако этому способу присущи следующие недостатки. Точность измерения диаметра не высока из-за зависимости продольной ширины формируемого изображения от качества обработки поверхности, а также из-за критичности способа к непараллельности осей фокусирующего элемента и продольной оси отверстия. Для измерений в широком диапазоне диаметров способ требует изменений геометрических характеристик фокусирующего элемента, что сопряжено со значительными технологическими трудностями.
Цель изобретения - повышение точности определения геометрических параметров и обеспечение возможности контроля отверстий с низким качеством обработки поверхности за счет устранения влияния указанного параметра на точность измерения, а также за счет устранения зависимости точности от неперпендикулярно,сти сечения, в котором производится измерение, оси отверстия, что дает возможность определения геометрических параметров отверстия в любом произвольно заданном сечении отверстия.
Поставленная цель достигается тем, что согласно способу, обеспечивающему бесконтактное определение геометрических параметров отверстий осуществляют формирование светового пучка, направляют его на внутреннюю поверхность контролируемого отверстия, сканируют им в заданном измерительном сечении из точки на нем, после регистрации отраженного излучения определяют модуль Vm линейной скорости перемещения облучающего светового пятна на поверхности отверстия по контуру сечения в пяти несовпадающих точках этого контура, а геометрические параметры отверстия в заданном сечении определяют из уравнения
//X, Y; Xi X2...X5; Yi, Y2...Y5// О, где Хт и Ym. m 1 ...5, - рассчитанные декартовы координаты точек, в которых определяется модуль Vm линейной скорости.
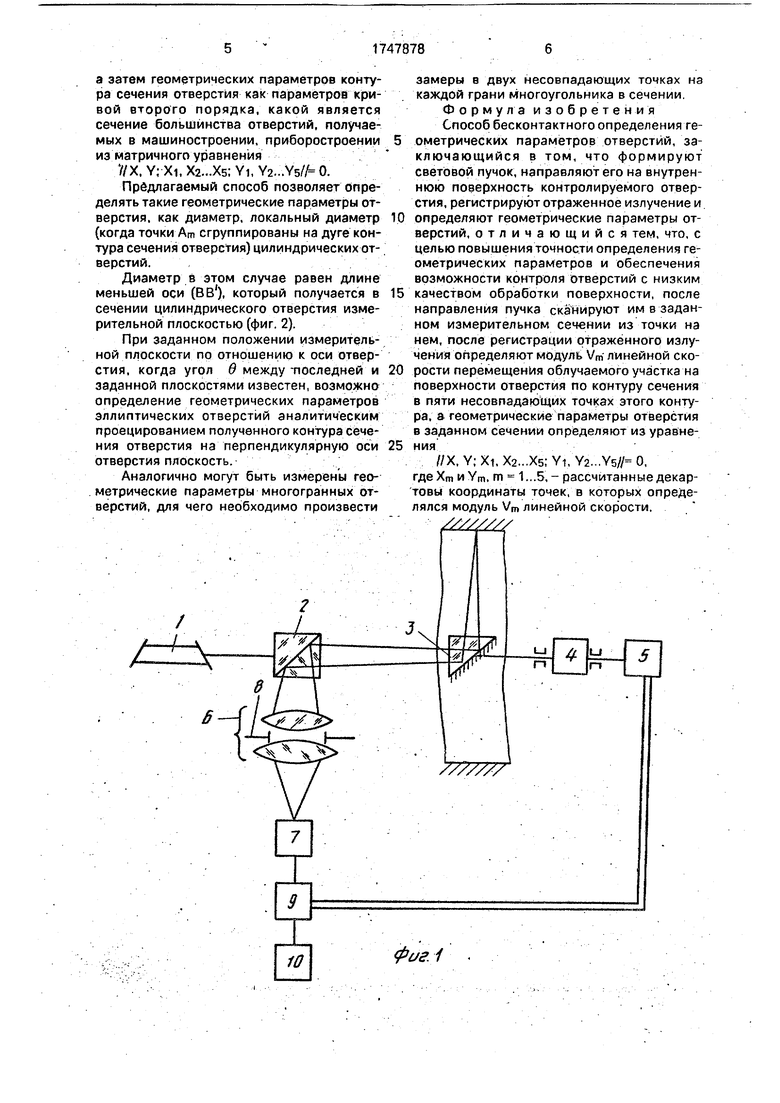
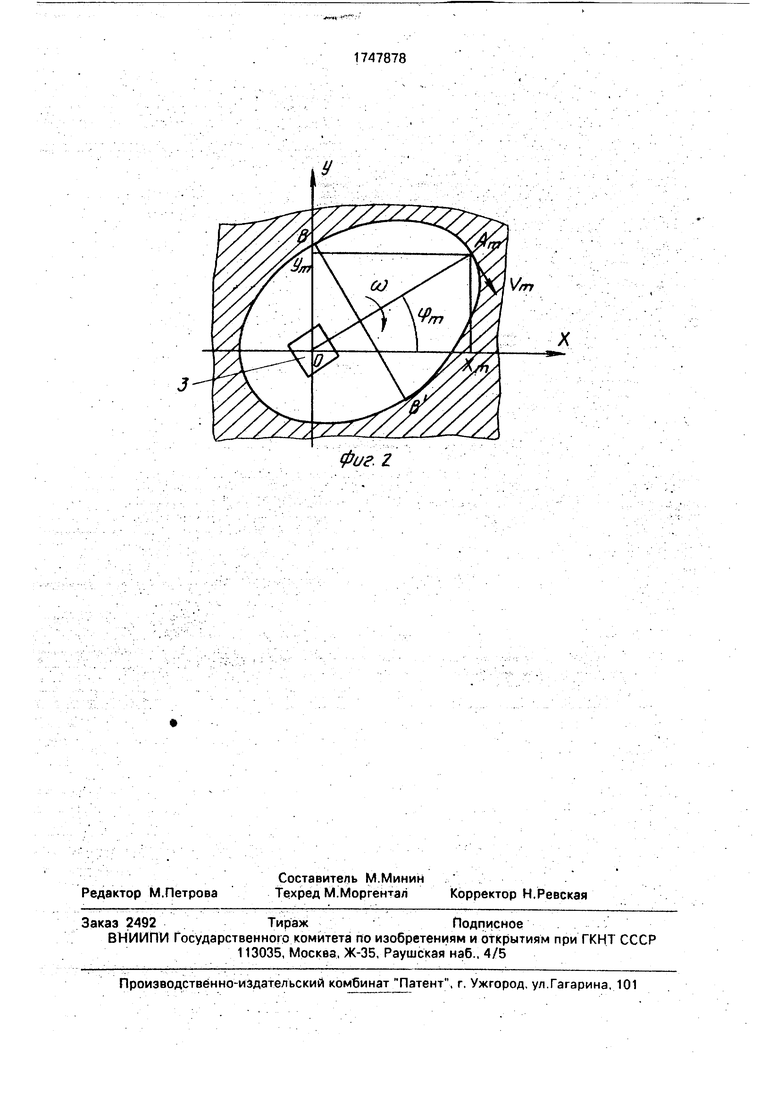
На фиг. 1 приведена оптическая схема устройства, реализующего предлагаемый способ; на фиг. 2 - схема, поясняющая определение положения пяти измерительных точек на контуре сечения отверстия.
Устройство (фиг. 1) содержит последовательно установленные источник 1 излуче ния (ИИ), формирующий узкий коллимиро- ванный пучок, светоделительный элемент (СДЭ) 2, сканирующий элемент (СЭ) 3, установленный с возможностью вращения посредством привода 4 вокруг оси, содержащей пучок На одной оси с приводом 4 установлен измеритель 5 угла поворота и скорости вращения (ИУПС) СЭ 3. Отражающая грань СЭ 3 расположена под
углом 45° к оси его вращения На оси, перпендикулярной направлению распространения пучка и проходящей через центр СДЭ 2, на некотором удалении от него установлены объектив (ОБ) б, создающий изображение облученного пучком участка поверхности контролируемого отверстия на чувствительном элементе блока 7 определения модуля скорости перемещения поверхности (БОМС), диафрагма 8, служащая для
обеспечения необходимой глубины резкости изображенного ОБ 6 пространства. Выходы БОМС 7 и ИУПС 5 подключены к входу ЭВМ 9, подключенной к индикатору 10. Способ осуществляют следующим образом,
Узкий коллимированный пучок излучения фиг. 2 поступает на СЭ 3, который вращается с угловой скоростью ( ш ± А (У ), где Auh- погрешность, вносимая приводом СЭ
3. Последний отклоняет пучок на 90°, приводя его к плоскости сканирования, и направляет на диффузно отражающую поверхность отверстия
Часть диффузно отраженного поверхностью излучения, вновь отразившись от СЭ, будучи затем отклоненной СДЭ 2 на 90°, фокусируется ОБ 6, содержащим диафрагму, на чувствительную площадку БОМС так, что на ней создается изображение облученного участка поверхности отверстия, которое перемещается по этой чувствительной площадке в процессе вращения СЭ.
В заданные пять несовпадающих моментов времени в течение одного оборота
СЭ производится замер модуля Vm линейной скорости перемещения облучающего светового потока по поверхности отверстия. В эти же моменты времени измеряется скорость вращения com СЭ и угол отклонения пучка относительно фиксированной оси, введенной в плоскости Сканирования декартовой системы координат. При этом т-1,2...5.
Параметры Vm. Шт и рт вводятся в
ЭВМ, где реализован алгоритм вычисления координат пяти точек Ат как
Vn
(От
COS (pm : Vm Sin pm ,
Шт
а затем геометрических параметров контура сечения отверстия как параметров кривой второго порядка, какой является сечение большинства отверстий, получаемых в машиностроении, приборостроении из матричного уравнения
y/X,Y;Xi,X2...X5;Yi,Y2....
Предлагаемый способ позволяет определять такие геометрические параметры отверстия, как диаметр, локальный диаметр (когда точки Ат сгруппированы на дуге контура сечения отверстия) цилиндрических отверстий.
Диаметр в этом случае равен длине меньшей оси (ВВ), который получается в сечении цилиндрического отверстия измерительной плоскостью (фиг. 2).
При заданном положении измерительной плоскости по отношению к оси отверстия, когда угол в между -последней и заданной плоскостями известен, возможно определение геометрических параметров эллиптических отверстий аналитическим проецированием полученного контура сечения отверстия на перпендикулярную оси отверстия плоскость.
Аналогично могут быть измерены геометрические параметры многогранных отверстий, для чего необходимо произвести
замеры в двух несовпадающих точках на каждой грани многоугольника в сечении Формула изобретения Способ бесконтактного определения ге- ометрических параметров отверстий, заключающийся в том, что формируют световой пучок, направляют его на внутреннюю поверхность контролируемого отверстия, регистрируют отраженное излучение и
0 определяют геометрические параметры отверстий, отличающийся тем, что, с целью повышения точности определения геометрических параметров и обеспечения возможности контроля отверстий с низким
5 качеством обработки поверхности, после направления пучка сканируют им в заданном измерительном сечении из точки на нем, после регистрации отраженного излучения определяют модуль Vm линейной ско0 рости перемещения облучаемого участка на поверхности отверстия по контуру сечения в пяти несовпадающих точках этого контура, э геометрические параметры отверстия в заданном сечении определяют из уравне5 ния
//X, Y; XL X2...X5; Yi, Y2. .Y5// 0, гдеХт и Ym, т 1...5, - рассчитанные декартовы координаты точек, в которых определялся модуль Vm линейной скорости.
;////////
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ бесконтактного измерения диаметра отверстий | 1989 |
|
SU1728649A1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТОПОГРАФИИ ПОВЕРХНОСТИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2208370C2 |
| УСТРОЙСТВО ЮСТИРОВКИ ДВУХЗЕРКАЛЬНОЙ ЦЕНТРИРОВАННОЙ ОПТИЧЕСКОЙ СИСТЕМЫ | 2011 |
|
RU2467286C1 |
| Способ определения диаметра цилиндрических отверстий | 1988 |
|
SU1597533A1 |
| Устройство для измерения пространственно-временных характеристик световых пучков | 1990 |
|
SU1791788A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА | 1990 |
|
SU1834492A1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИАМЕТРА ОБЪЕКТОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С НАПРАВЛЕННО ОТРАЖАЮЩЕЙ ПОВЕРХНОСТЬЮ | 2007 |
|
RU2379628C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДИСТАНЦИОНИРУЮЩИХ РЕШЕТОК | 2006 |
|
RU2334944C2 |
| БЛОК ДАТЧИКА ДЛЯ КОНТРОЛЯ ПОВЕРХНОСТИ ОБЪЕКТА И СПОСОБ ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО КОНТРОЛЯ | 1998 |
|
RU2186372C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВОЛНОВЫХ АБЕРРАЦИЙ ОПТИЧЕСКОЙ СИСТЕМЫ | 2018 |
|
RU2680657C1 |
Изобретение относится к контрольно- измерительной технике, в частности к оптическим методам определения геометрических параметров отверстий, полученных при металлообработке Цель изобретения - повышение точности определения геометрических параметров и обеспечение возможности контроля отверстий с низким качеством обработки поверхИзобретение относится к контрольно- измерительной технике в частности к оптическим методам определения геометрических параметров отверстий, полученных при металлообработке. Известен способ измерения диаметра отверстия путем облучения отверстия электромагнитной волной, измерения амплитуды интерференционного сигнала нечетных гармоник, получения комбинированной дифракционной и интерференционной картин. Для расширения диапазона измеряемых отверстий изменяют длину волны излучения и фиксируют длину волны, при которой ампности. Коллимированный пучок поступает на сканирующий элемент, который вращается с угловой скоростью ( м ± До), и отклоняется им на поверхность отверстия Часть отраженного излучения фокусируется объективом на чувствительную площадку блика определения модуля скорости В заданные пять несовпадающих моментов времени в течение одного оборота сканирующего элемента производится замер модуля /т линейной скорости перемещения светового пятна по поверхности отверстия. В эти же моменты времени измеряется скорость вращения сканирующего элемента и угол рт отклонения пучка относительно фиксированной оси декартовой системы координат При этом т 1,2 5 Параметры Vm,(От и (fin вводятся в ЭВМ, где реализован алгоритм вычисления координат Xm. Ym) точек Am, а затем геометрических параметров контура сечения отверстия из уравнения //X, Y, XL X2 Xs. Yi. Y2 . Y5//- 0. 2 ил. (Л С литуда интерференционного сигнала нечетных гармоник равна удвоенному значению амплитуды электромагнитной волны в свободном пространстве. Наиболее близким к предлагаемому является способ бесконтактного измерения параметров отверстий, заключающийся в том, что вокруг цилиндрической поверхности формируют световое кольцо, центр которого совмещен с продольной осью цилиндрической поверхности. Световое кольцо фокусируют на цилиндрическую поверхность. При этом по меньшей мере часть светового кольца фокусируется на цилиндvj N ч| 00 ч 00
/
фиг. 1
фиг. 2
| Способ измерения диаметра отверстия | 1978 |
|
SU773429A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Патент США № 4465374, кл G 01 В 11/12 | |||
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
