Изобретение относится к области измерительной техники и может быть использовано в атомной промышленности при производстве дистанционирующих решеток тепловыделяющих сборок.
Дистанционирующая решетка (ДР) представляет собой совокупность тонкостенных ячеек, обрамленных снаружи ободом (Ф.Г.Решетников, Ю.К.Бибилашвили, И.С.Головнин и др. Разработка, производство и эксплуатация тепловыделяющих элементов энергетических реакторов. Кн. 1. М.: Энергоатомиздат, 1995). При изготовлении тепловыделяющих сборок в ячейки вставляются тепловыделяющие элементы (ТВЭЛ). Ряд ДР, расположенных по высоте тепловыделяющих сборок, обеспечивает ее жесткость и необходимое расстояние между тепловыделяющими элементами. При изготовлении ДР подвергают контролю следующие параметры: диаметр вписанной в ячейку окружности; диаметр окружности, вписанной в отверстие под канал; позиционные отклонения центров вписанных окружностей в ячейку и в отверстие под канал; размер «под ключ»; принадлежность координат наружной поверхности обода ДР полю допуска; наличие/отсутствие ячейки в месте расположения отверстия под канал (нормальная конструкция - отсутствие ячейки).
Известно устройство для контроля отверстий деталей (см. патент RU №2245516 С2, кл. G01В 11/30), содержащее последовательно расположенные на одной оптической оси источник света, коллиматор, формирователь кольцевой оптической метки в виде дифракционной пластины, проектор кольцевой метки в виде конического зеркала и матричный фотоприемник, соединенный с блоком обработки сигнала, а также узел перемещения детали вдоль оси.
Данное устройство может использоваться для контроля ДР, однако в его состав необходимо ввести дополнительно двухкоординатный стол для перемещения ДР по двум координатам в плоскости, перпендикулярной оптической оси, при этом устройство имеет два существенных недостатка.
Во-первых, низкое быстродействие из-за механического перемещения ДР вдоль оптической оси, необходимого при контроле ее параметров по высоте (по нескольким сечениям).
Во-вторых, низкая точность контроля, обусловленная дополнительной погрешностью позиционирования ДР при контроле ее параметров в разных сечениях по высоте.
Наиболее близким по технической сути к заявляемому устройству (прототипом) является устройство для бесконтактного контроля геометрических параметров ДР ядерных реакторов (см. О.И.Битюцкий, В.В.Вертопрахов, А.А.Гущина и др. Трехмерный бесконтактный контроль геометрических параметров дистанционирующих решеток ядерных реакторов // Автометрия, 2003, том 39, №5), содержащее последовательно расположенные на оптической оси источник когерентного излучения, формирователь структурного освещения, устройство позиционирования ДР и фотоприемный модуль, соединенный с блоком управления и обработки информации. Указанные выше признаки прототипа совпадают с существенными признаками заявляемого изобретения.
Формирователь структурного освещения прототипа состоит из узла решеток Дамманна, расщепляющего лазерный луч на матрицу 12×13 дифракционных порядков, и призмы, разделяющей дифрагированные лучи по трем направлениям (под 120° друг к другу). Сформированные три матрицы световых пучков освещают под углом 30° поверхности трех пуклевок внутри ячейки ДР. Смена ячеек ДР на контрольной позиции производится с помощью устройства прецизионного позиционирования (перемещения) ДР по координатам XY, а при контроле отверстий под канал и размера "под ключ" (обода решетки) устройство позиционирования осуществляет поворот ДР. Фотоприемный модуль представляет собой три идентичных объектива и три ПЗС камеры, которые обеспечивают регистрацию светового распределения на поверхностях элементов ДР. Информация с ПЗС камер обрабатывается в блоке управления и обработки информации, который также управляет устройством позиционирования ДР.
Известное устройство позволяет производить контроль следующих параметров ДР:
- диаметры вписанных окружностей ячеек;
- диаметры вписанных окружностей отверстий под каналы;
- расстояния между соседними ячейками (расстояния между центрами вписанных окружностей);
- сдвиги центров вписанных окружностей для ячеек относительно параметров чертежа ДР;
- размеры «под ключ», характеризующие габаритные размеры ДР.
Основными недостатками известного устройства являются, во-первых, его сложная конструкция, обусловленная наличием трех каналов регистрации изображений и устройства позиционирования с механизмом вращения ДР на измерительной позиции.
Во-вторых, данное устройство предназначено только для контроля ряда ДР, имеющих шестигранную форму и ячейки с тремя выступами (пуклевками), и не может быть использовано для контроля ДР другой формы, например квадратной.
В-третьих, устройство имеет низкую производительность из-за затрат времени, необходимого для обеспечения поворота ДР на измерительной позиции при контроле отверстий под канал и обода ДР.
Целью настоящего изобретения является устранение указанных недостатков и достижение следующего технического результата: упрощение конструкции устройства при одновременном расширении функциональных возможностей и повышение его быстродействия.
Указанный технический результат при осуществлении изобретения достигается тем, что заявляемое устройство содержит расположенные последовательно на оптической оси источник когерентного излучения, формирователь структурного освещения (ФСО), устройство позиционирования ДР и фотоприемный модуль. ФСО выполнен в виде дифракционного оптического элемента (ДОЭ) на основе фазовой или/и амплитудной микроструктуры на прозрачной подложке. ДОЭ содержит непрозрачную область, расположенную в центре элемента, рабочее поле, формирующее систему световых полос на поверхности контролируемого фрагмента ДР, и юстировочное поле, формирующее два световых кольца того же диаметра, что и рабочее поле, для юстировки фотоприемного модуля. Фотоприемный модуль включает объектив и камеру с матричным фотоприемником. Кроме того, заявляемое устройство содержит блок управления и обработки информации, вход которого соединен с фотоприемной камерой, а выход - с устройством позиционирования.
Отличительными от прототипа признаками являются выполнение ФСО в виде ДОЭ на основе фазовой или/и амплитудной микроструктуры на прозрачной подложке, содержащего непрозрачную область, расположенную в центре ДОЭ, рабочее поле, формирующее систему световых полос на поверхности контролируемого фрагмента ДР, и юстировочное поле, формирующее два световых кольца того же диаметра, что и рабочее поле, для юстировки фотоприемного модуля.
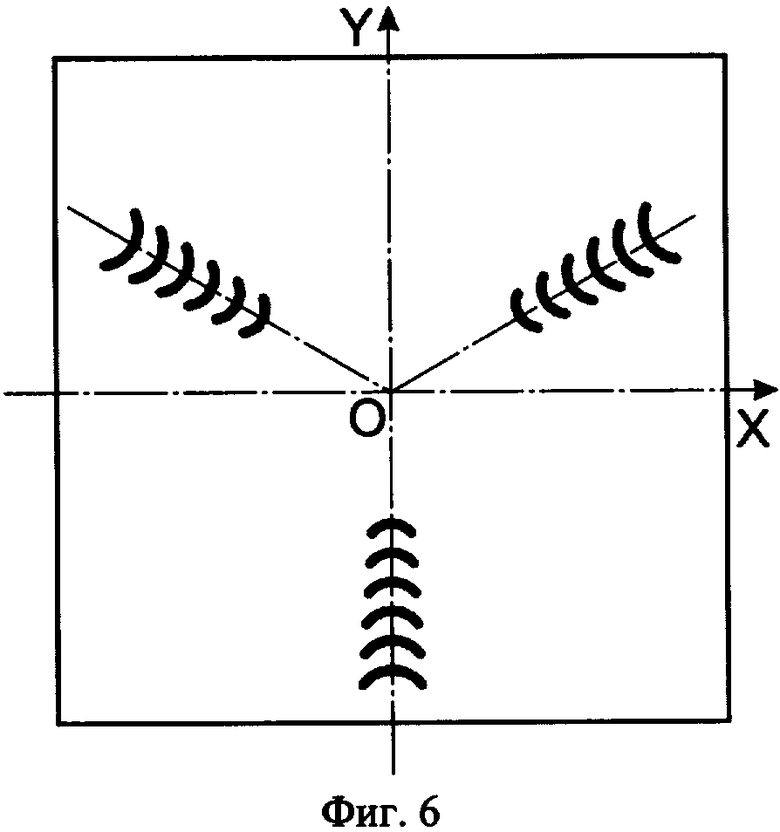
Сущность изобретения поясняется фиг.1-6, где на фиг.1 представлена структурная схема заявляемого устройства; на фиг.2 - конструкция ДР; на фиг.3 - устройство формирователя структурного освещения; на фиг.4 приведена схема формирования изображения юстировочных колец; фиг.5 поясняет принцип обработки изображения с фотоприемной камеры; на фиг.6 приведен вид изображения с фотоприемной камеры, полученного от ячейки ДР.
Заявляемое устройство (фиг.1) состоит из расположенных последовательно по оптической оси источника когерентного излучения 1, ФСО 2 в виде ДОЭ, фокусирующего излучение источника 1 в систему световых полос 3 на поверхности контролируемого фрагмента 4 ДР 5, устройства позиционирования 6 контролируемой ДР 5, фотоприемного модуля 7, состоящего из объектива 8 и фотоприемной камеры 9 с матричным фотоприемником 10. Выход фотоприемной камеры 9 соединен с видеовходом блока 11 управления и обработки информации, управляющий выход которого соединен с устройством позиционирования 6 контролируемой ДР 5.
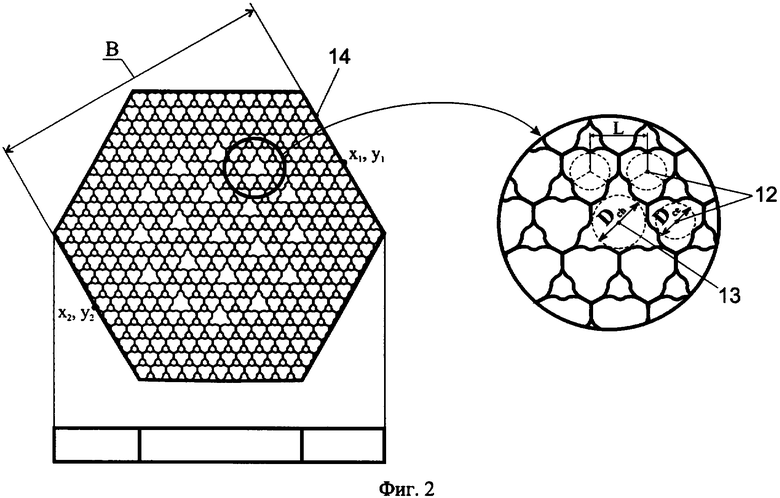
Конструкция ДР одного типа (шестигранного) приведена на фиг.2. Элементами контроля ДР являются ячейки 12 (размеры Dce, L), отверстия под канал 13 (размер Dch) и обод 14 (размер В).
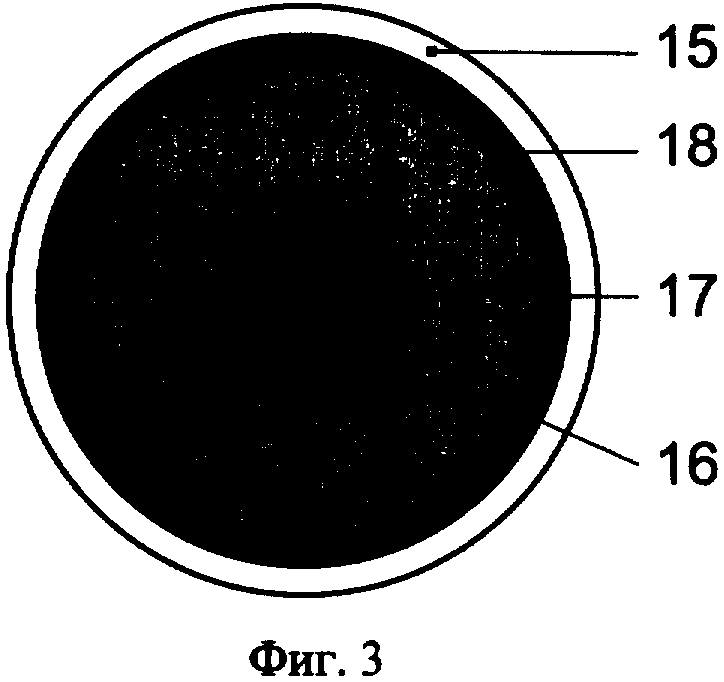
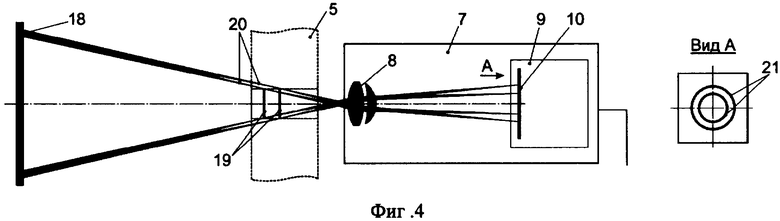
Формирователь структурного освещения 2 - ДОЭ - выполнен в виде фазовой и/или амплитудной микроструктуры на прозрачной подложке. Устройство ДОЭ приведено на фиг.3. На подложке 15 расположены непрозрачная область 16, рабочее поле 17 и юстировочное поле 18. Непрозрачная область 16 в центре ДОЭ не пропускает прямое излучение от источника когерентного излучения 1 в объектив 8 и уменьшает угловую апертуру рабочего поля 17, вследствие чего освещение поверхности контролируемого элемента 4 производится излучением, в котором отсутствуют скользящие лучи. Рабочее поле 17 создает волновой фронт, который на заданном расстоянии трансформируется в набор световых полос 3. Юстировочное поле 18 формирует два световых кольца 19 (фиг.4) того же диаметра, что формирует рабочее поле 17, но в данном случае лучи 20 не пересекают оптическую ось. При наличии в зоне контроля элементов ДР эти лучи не попадают в апертуру проекционного объектива 8, и юстировочные кольца отсутствуют в изображении с камеры 9. Когда ДР отсутствует, в апертуру объектива 8 попадают только лучи от юстировочного поля 18. По изображению с фотоприемной камеры 9 световых колец 19 юстируется фотоприемный модуль 7 по отношению к остальной части оптической системы. При правильной юстировке изображение будет иметь вид двух концентрических окружностей 21.
Заявляемое устройство (фиг.1) работает следующим образом. Параллельный пучок света от источника когерентного излучения 1 освещает формирователь структурного освещения - ДОЭ 2, который формирует на контролируемой ячейке 4 (или другом элементе ДР) набор световых колец (полос) 3. Освещенная поверхность контролируемого фрагмента ДР проецируется объективом 8 на матричный фотоприемник 10 камеры 9. Зарегистрированное изображение передается в блок управления и обработки информации 11, где в зависимости от установленного на измерительную позицию элемента (ячейка, отверстие под канал или обод ДР) выполняется обработка изображения соответствующего элемента ДР 5 и вычисляются его геометрические параметры. Далее блок 11 управления и обработки информации формирует сигналы управления перемещением контролируемой ДР 5 на двухкоординатное устройство позиционирования 6 для позиционирования на измерительную позицию следующего элемента ДР 5. Таким образом, последовательно обмеряется вся ДР.
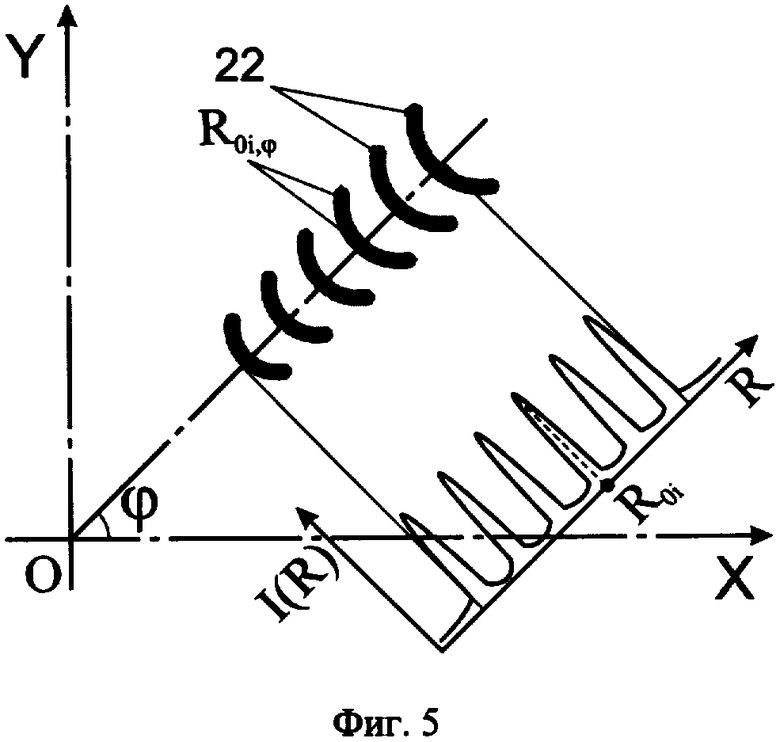
Принцип обработки изображений различных элементов ДР поясняется фиг.5. При контроле отверстий под канал 13 и обода решетки 14 световые полосы 3 на поверхности элемента ДР в изображении с фотоприемной камеры 9 выглядят в виде набора дуг 22, отличающихся длиной и кривизной в зависимости от вида контролируемого фрагмента ДР. При контроле ячеек 12 ДР на изображении будет наблюдаться несколько (по числу пуклевок, фиксирующих ТВЭЛ) наборов дуг (фиг.6), расположенных симметрично относительно центра изображения под определенными углами относительно друг друга.
Анализ изображений производится в полярной системе координат с центром О (фиг.6), соответствующим положению оптической оси, которое определяется в процессе юстировки системы с использованием излучения от юстировочного поля 18 ДОЭ. Изображения дуг радиально сканируются из центра О с некоторым шагом по углу Δϕ. В радиальном направлении распределение интенсивности I(R) представляет собой последовательность пиков. Первый пик интенсивности соответствует ближнему к ДОЭ световому кольцу структурного освещения. Далее для каждого пика интенсивности находится R0i - радиус i-ой дуги на данном направлении сканирования по углу ϕ. После сканирования всего изображения каждая дуга будет описываться массивом значений R0i,ϕ. Затем с помощью аппроксимации этих массивов определяется минимальный радиус дуги R0i min, величина которого пропорциональна расстоянию от оптической оси до контролируемой поверхности. Далее по величине R0i min определяется расстояние ri от контролируемой поверхности до оптической оси в сечении i-го светового кольца. Зависимость ri от R0i min определяется расчетным путем или в процессе калибровки измерительной системы. Таким образом, в результате описанной процедуры обработки изображения будет вычислен массив расстояний r0, r1,...,rn от контролируемой поверхности до оптической оси для каждого светового кольца (n - число световых колец), по которым затем вычисляются геометрические параметры элемента ДР.
В случае контроля габаритного размера ДР (размера под ключ В) измерения производятся в двух положениях ДР. При каждом измерении из массива чисел r0, r1,...,rn выбирается минимальное значение, которое затем переводится в декартову систему координат XY ДР 5 с учетом положения подвижной части двухкоординатного устройства позиционирования 6. При первом измерении вычисляются координаты x1, y1, а при втором - x2, у2, расстояние между этими точками равно размеру В.
При контроле отверстия 13 под канал измерения производятся в нескольких положениях ДР (по числу пуклевок). При каждом таком измерении вычисленные координаты r0, r1,...,rn переводятся с учетом углового положения пуклевки в систему координат, связанную центром отверстия под канал по чертежу. Затем вычисляются положения центров xch i, ych i и диаметры Dch i вписанных окружностей для каждого сечения.
При контроле ячейки 12 ДР 5 измерение производится в одном положении ДР. При этом на изображении будут находиться несколько (по числу пуклевок) наборов дуг (фиг.6). По определенным для каждого набора дуг координатам r0, r1,...,rn с учетом углового положения пуклевок определяются положения центров Xce i, Yce i и диаметры Dce i вписанных окружностей для каждого сечения ячейки.
В качестве источника когерентного излучения 1 может использоваться полупроводниковый лазер с расширителем пучка в виде коллиматора.
В качестве формирователя структурного освещения 2 может быть использован амплитудный дифракционный элемент (Л.В.Финогенов. Контроль геометрических параметров отверстий с использованием дифракционного кольцевого фокусатора. Автометрия, том 41, №6, 2005, стр.23), созданный с помощью лазерного фотопостроителя CLWS 300 ((Gurenko, V.M., Kastorsky, L.В., Kiryanov, V.P., Kiryanov, A.V., Kokarev, S.A., Vedernikov, V.M., Verkhoglyad, A.G.: Laser writing system CLWS-300/C-M for microstructure synthesis an the axisymmetric 3-D surfaces. Proc. SPIE 4900 (2002) pp.320-325).
В качестве двухкоординатного устройства позиционирования 6 ДР в плоскости, перпендикулярной оптической оси, может быть использован двухкоординатный моторизованный стол SCAN 300×300 фирмы Marzhauser (http://www.marzhauser.com/Pdf/scan300×300eng.pdf).
Объектив 8 по характеристикам подобен объективам, используемым в интроскопах.
В качестве фотоприемной камеры 9 может быть использована промышленная цифровая камера PL-A781 фирмы PixeLINK (http://www.pixelink.com). Данная камера построена на базе фотодиодной матрицы 2208×3000 элементов. Размер одного пикселя 3.5×3.5 мкм.
В качестве блока 11 управления и обработки информации может быть использован компьютер на базе процессора AMD Athlon 3200+ и объемом оперативной памяти 512 Мб. На компьютере должны быть установлены контроллеры FireWire (для связи с камерой) и USB (для связи с моторизованным столом).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство контроля качества дифракционных и голографических оптических элементов | 2024 |
|
RU2828648C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО ИЗМЕРЕНИЯ ВИБРАЦИОННЫХ ПАРАМЕТРОВ ОБЪЕКТА | 2010 |
|
RU2447410C2 |
| Устройство для контроля отверстий деталей | 2019 |
|
RU2721716C1 |
| Установка для контроля размеров элементов фотошаблонов | 1981 |
|
SU968605A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПОВЕРХНОСТНЫХ ДЕФЕКТОВ ЦИЛИНДРИЧЕСКИХ ОБЪЕКТОВ | 2015 |
|
RU2604109C2 |
| ДИСТАНЦИОНИРУЮЩАЯ РЕШЕТКА ТЕПЛОВЫДЕЛЯЮЩЕЙ СБОРКИ ЯДЕРНОГО РЕАКТОРА (ВАРИАНТЫ) | 2012 |
|
RU2518058C1 |
| Устройство для обнаружения поверхностных дефектов цилиндрических объектов | 2018 |
|
RU2677054C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ И ФОРМЫ МЕТАЛЛУРГИЧЕСКИХ ИЗДЕЛИЙ | 1995 |
|
RU2098755C1 |
| СПОСОБ РЕГИСТРАЦИИ ОПТИЧЕСКОГО ВОЛНОВОГО ФРОНТА И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2425337C2 |
| СПОСОБ КОНТРОЛЯ ФОРМЫ ВНУТРЕННИХ ДЕТАЛЕЙ | 2016 |
|
RU2627974C1 |
Устройство для контроля дистанционирующих решеток содержит последовательно расположенные на оптической оси источник когерентного излучения, формирователь структурного освещения, устройство позиционирования дистанционирующей решетки и фотоприемный модуль, включающий объектив и фотоприемную камеру с матричным фотоприемником, соединенную с блоком управления и обработки информации, управляющий выход которого подключен к устройству позиционирования. Формирователь структурного освещения выполнен в виде дифракционного оптического элемента на основе фазовой или/и амплитудной микроструктуры на прозрачной подложке, содержащего непрозрачную область, расположенную в центре дифракционного оптического элемента, рабочее поле, формирующее систему световых полос на поверхности контролируемого фрагмента дистанционирующей решетки, и юстировочное поле, формирующее два световых кольца того же диаметра, что и рабочее поле, для юстировки фотоприемного модуля. Технический результат - упрощение конструкции устройства при одновременном расширении функциональных возможностей и повышение его быстродействия. 6 ил.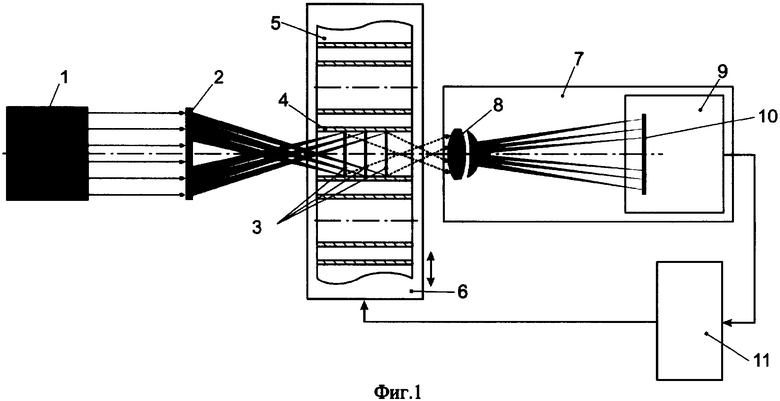
Устройство для контроля дистанционирующих решеток, содержащее последовательно расположенные на оптической оси источник когерентного излучения, формирователь структурного освещения, устройство позиционирования дистанционирующей решетки и фотоприемный модуль, включающий объектив и фотоприемную камеру с матричным фотоприемником, соединенную с блоком управления и обработки информации, управляющий выход которого подключен к устройству позиционирования, отличающееся тем, что формирователь структурного освещения выполнен в виде дифракционного оптического элемента на основе фазовой или/и амплитудной микроструктуры на прозрачной подложке, содержащего непрозрачную область, расположенную в центре дифракционного оптического элемента, рабочее поле, формирующее систему световых полос на поверхности контролируемого фрагмента дистанционирующей решетки, и юстировочное поле, формирующее два световых кольца того же диаметра, что и рабочее поле, для юстировки фотоприемного модуля.
| БИТЮЦКИЙ О.И., ВЕРТОПРАХОВ В.В., ГУЩИНА А.А | |||
| и др | |||
| Трехмерный бесконтактный контроль геометрических параметров дистанционирующих решеток ядерных реакторов | |||
| - Автометрия, 2003, т | |||
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ОТВЕРСТИЙ ДЕТАЛЕЙ | 2003 |
|
RU2245516C2 |
| Финогенов Л.В | |||
| Контроль геометрических параметров отверстий с использованием дифракционного кольцевого фокусатора | |||
| - Автометрия, т | |||
| Механический грохот | 1922 |
|
SU41A1 |

