со
С
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для уравновешивания вращающихся тел | 1980 |
|
SU945695A1 |
| Устройство для уравновешивания вращающихся тел | 1981 |
|
SU1017938A1 |
| Устройство для уравновешивания вращающегося тела | 1976 |
|
SU657293A1 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ | 1971 |
|
SU424371A3 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА | 2008 |
|
RU2426976C2 |
| Устройство для динамической балансировки роторов | 1985 |
|
SU1293508A1 |
| Автоматический балансировочный станок | 1985 |
|
SU1226089A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2694108C1 |
| Способ балансировки роторов и устройство для его осуществления | 1980 |
|
SU943546A1 |
| Измерительное устройство к баланси-РОВОчНОМу СТАНКу | 1979 |
|
SU853446A1 |
Изобретение относится к балансировочной технике. Цель изобретения - повышение производительности за счет сокращения времени цикла балансировки. Объект балансировки помещают в узел 2 фиксации и по сигналу с блока 8 управления и вычисления приводят во вращение, скорость которого определяется датчиком 9, блоком 11 определения скорости. При разгоне определяется скорость вращения на каждом периоде и при соответствии норме поддерживается постоянной с помощью привода 3 разгона. В блоке 7 определения фазы и блоке б измерения амплитуды определяются параметры дисбаланса и по ним с помощью блока 8 управления и вычисления вырабатывается корректирующий сигнал на оптический квантовый генератор 4. 7 ил
Изобретение относится к балансировочной технике и может быть использовано в приборостроении для автоматизации процесса уравновешивания балансов часов.
Известно устройство для уравновешивания вращающихся тел, содержащее привод вращения, датчик дисбаланса, датчик скорости вращения, оптический квантовый генератор (ОКГ), блок смещения и запоминания фазы баланса, привод вращения, блок формирования импульсов заполнения, аналоговый блок запоминания амплитуды дисбаланса, блок автоматического поддержания резонансной скорости вращения, блок сравнения, датчик количества и интегратор.
Наиболее близким по технической сущности и достигаемому результату является устройство для уравновешивания вращающихся тел, содержащее последоватеЖно
соединенные датчик дисбаланса, блок запо- минани я амплитуды, аналоговую схему сравнения, блок автоматического поддержания резонансной скорости вращения и приводы вращения тела, последовательно соединенные датчик скорости вращения, блок формирования импульсов заполнения, блок смещения и запоминания тяжелой точки и оптический квантовый генератор (ОКГ), а также блок выработки управляющих команд, первый вход которого связан с датчиком скорости в ращения, первый выход - со вторым входом блока запоминания амплитуды дисбаланса, а второй вход - со вторым выходом блока автоматического поддержания резонансной скорости вращения, второй вход которого связан с датчиком скорости вращения, соединенным со вторым входом блока смещения и запоминания фазы тяжелыи точки, третий вход которого
VI Jb. VJ
О
-ч
N3
соединен с датчиком дисбаланса, а четвертый вход - со вторым выходом блока выработки управляющих команд, второй выход блока смещения и запоминания фазы тяжелой точки соединен с третьим входом блока выработки управляющих команд, а второй выход блока запоминания амплитуды дисбаланса связан с пятым входом блока смещения и запоминания фазы тяжелой точки.
Общим недостатком этих устройств является низкая производительность уравновешивания из-за невозможности раннего определения брака баланса по силе трения в цапфе (технологические отклонения), что приводит к уравновешиванию заведомо бракованных балансов; из-за отсутствия минимизации времени выхода на режим измерения дисбаланса, так как момент отклю- чения привода разгона происходит непосредственно по измерению скорости вращения баланса, что приводит к перерегулированию и неоправданно длительному времени успокоения; из-за вынужденного ожидания самоостанова баланса.
Целью изобретения является повышение производительности путем сокращения времени балансировки.
Использование изобретения позволяет уравновешивать заведомо годные балансы, исключить перерегулирование, приводящее к увеличению времени успокоения и сократить время останова.
Указанная цель достигается тем, что устройство для уравновешивания вращающихся тел, содержащее оптический квантовый генератор, последовательно соединенные датчик дисбаланса, блок измерения амплитуды, блок определения фазы, блок управления и вычисления, второй вход которого соединен со вторым выходом блока измерения амплитуды, датчик скорости, выход которого соединен со вторым входом блока определения фазы и третьим входом блока управления и вычисления, и соединенный с первым выходом привода разгона, снабжено Приводом торможения, вход которого соединен со вторым выходом блока управления и вычисления, и последовательно соединенными блоком определения скорости, вход которого соединен с выходом датчика скорости, блоком определения времени разгона и блоком индикации, второй вход которого соединен с третьим выходом блока управления и вычисления, четвертый выход которого соединен с оптическим квантовым генератором четвертый вход - с выходом блока определения времени разгона, а пятый вход - с выходом блока определения скорости и третьим входом блока определения фазы.
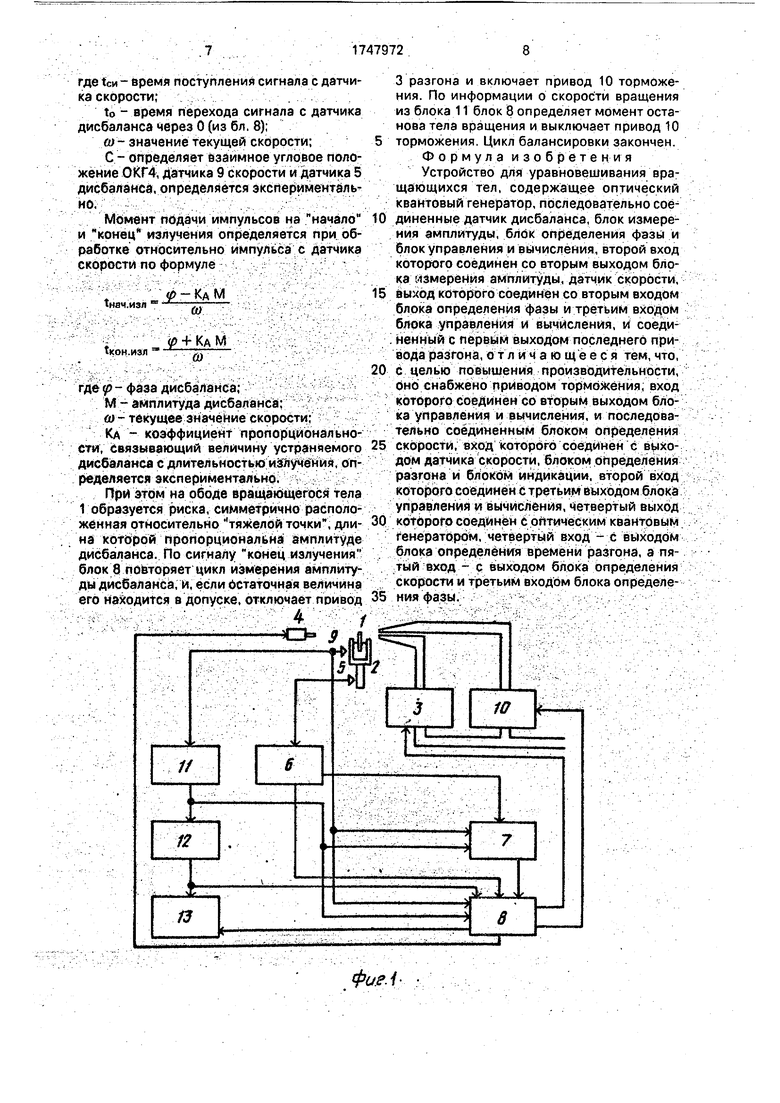
На фиг.1 представлена структурная схема устройства; на фиг 2-6 - схемы отдельных блоков; на фиг.7 - характеристика разгона.
Устройство для уравновешивания вращающихся тел содержит узел 2 фиксации вращающегося тела 1, привод 3 разгона. оптический квантовый генератор(ОКГ}4, последовательно соединенные датчик дисба0 ланса 5, блок измерения амплитуды 6, блок
7определения фазы и блок 8 управления и вычисления, второй вход которого соединен со вторым выходом блока 6 измерения амплитуды, датчик 9 скорости, выход которого
5 соединен со вторым входом блока 7 определения фазы и третьим входом блока 8 управления и вычисления, соединенный с первым выходом привода 3 разгона, а также привод 10 торможения, вход которого соединен со
0 вторым выходом блока 8 управления и вычисления, и последовательно соединенные блок 11 определения скорости вращения, вход которого соединен с выходом датчика 9 скорости, блок 12 определения времени
5 разгона и блок 13 индикации, второй вход которого соединен с третьим выходом блока
8управления и вычисления, четвертый выход которого соединен с оптическим квантовым генератором (ОКГ) 4, четвертый вход 0 с выходом блока 12 определения времени разгона, а пятый вход - с выходом блока 11 определения скорости вращения и третьим входом блока 7 определения фазы.
Узел фиксации 2 представляет собой
5 опорную вилку на платформе, установленной на упругих опорах.
Приводы 3, 10 соответственно разгона и торможения - пневматические, состоят из сопла, подающего воздух на узел баланса,
0 пневмопереключателя и ключа управления. Оптический квантовый генератор (ОКГ) 4, являющийся исполнительным механизмом для удаления материала с поверхности тела вращения, управляется сигналами с
5 блока 8 управления и вычисления.
При вращении баланса, имеющего неуравновешенность, возникающие колебания преобразуются датчиком 5 дисбаланса в электрический сигнал.
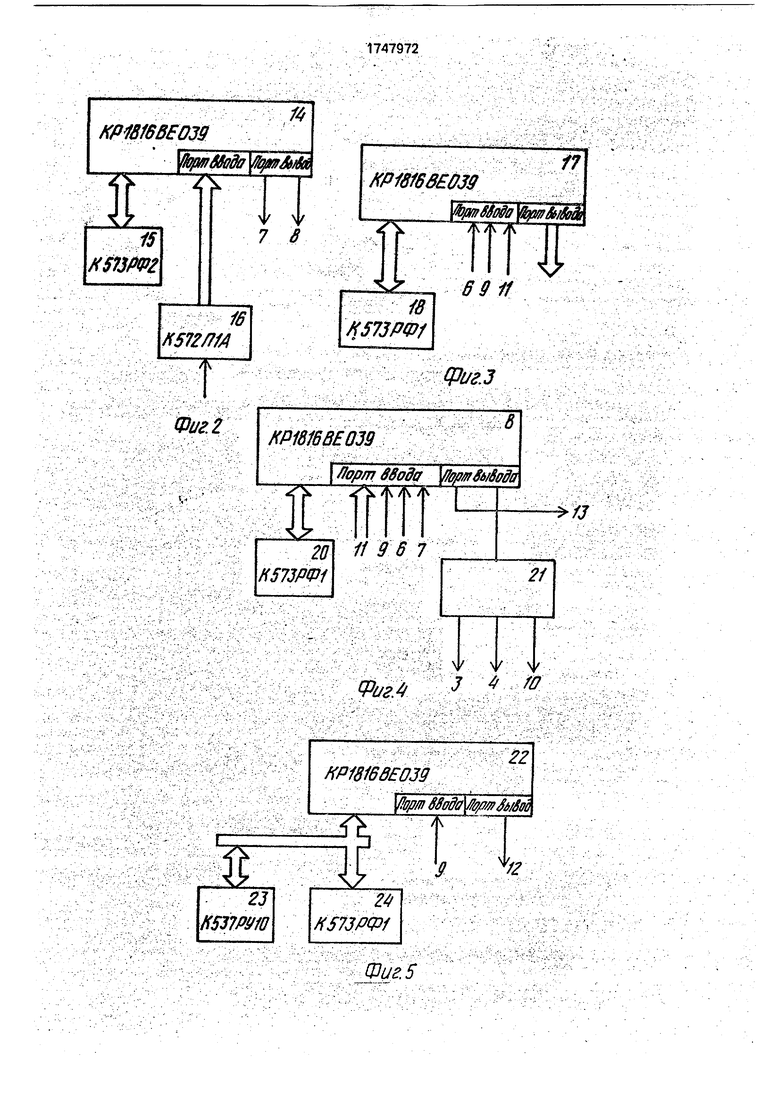
0 Блок 6 измерения амплитуды дисбаланса (фиг,2) обеспечивает преобразование сигнала дисбаланса в цифровую форму, а также формирование сигнала в блок 8 управления и вычисления при прохождении
5 сигнала с датчика 5 дисбаланса через О. В состав блока входят микро-ЭВМ 14 (КР1816ВЕ039), предназначенная для общего управления блоком обработки информации с АЦП, ее хранения и передачи в другие блоки; ПЗУ 15 предназначено для хранения
программы и констант для обработки информации; АЦП 16 (К572ПВ1А) предназначен для преобразования аналогового сигнала с датчика Дисбаланса в цифровую форму.
Блок 7 определения фазы (фиг.З) на основании информации с датчика 9 скорости вращения, блока 11 определения скорости и блока 6 измерения амплитуды определяет фазу дисбаланса, запоминает ее и при обра- ботке формирует начало и конец излучения в блок 8 управления и вычисления. В состав блока входят: микроЭВМ 17 (КР1816ВЕ039), ПЗУ 18 (К573РФ1).
Блок 8 управления и вычисления (фиг.4) обеспечивает работу всего устройства по заданной программе, состоит из микроЭВМ 19, выполненной на м/схеме КР1816ВЕ039; ПЗУ 20(К573РФ1) и блока силовых ключей 21.
Блок 11 определения скорости (фиг.5) определяет текущее значение скорости вращения тела, на основании сигналов, снимаемых с датчика 9 скорости, состоит из микроЭВМ 22 (КР1816ВЕ039); ОЗУ 23 (К573РУ10); ПЗУ24(К573РФ1).
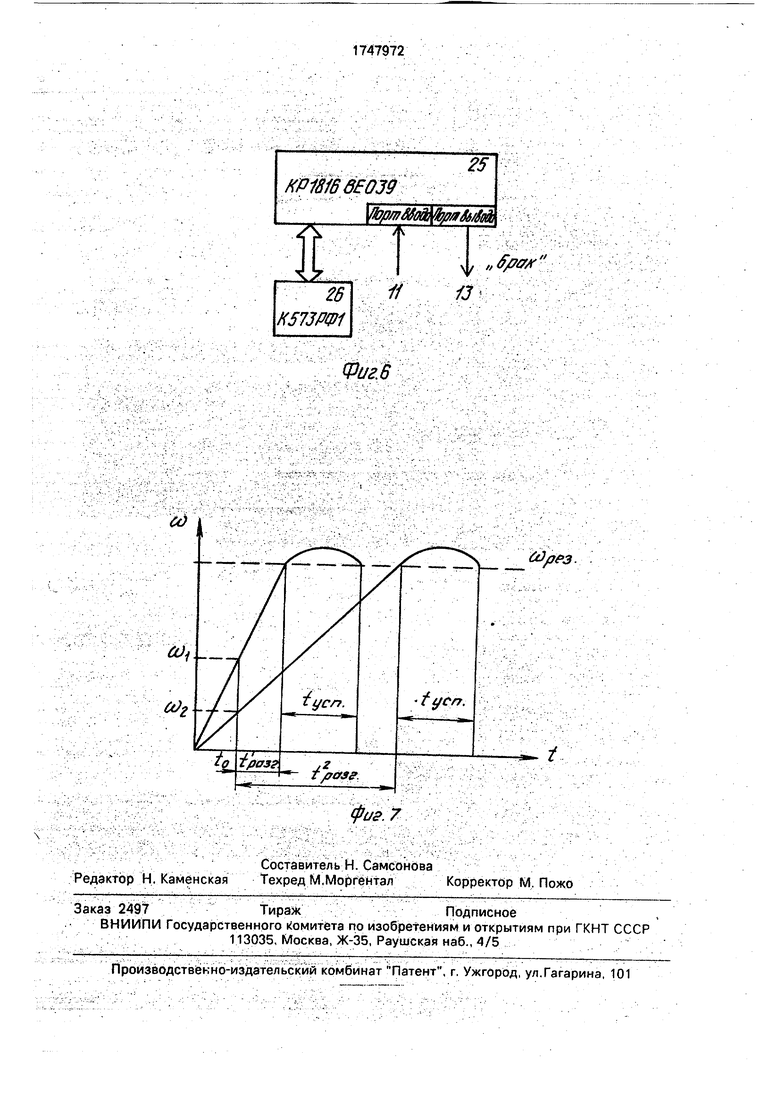
Блок 12 определения времени разгона (фиг.6) предназначен для обеспечения минимума времени измерения неуравновешенности баланса и содержит микроЭВМ 25(КР1816ВЕ039); ПЗУ 26 (К573РФ1).
Устройство работает следующим образом.
Оператор устанавливает тело вращения 1 в узел фиксации 2. По сигналу Пуск мик- роЭВМ 19 блока 8 управления и вычисления выдает команду на силовые ключи 21 для включения клапана привода 3 разгона, и тело 1 начинает раскручиваться. Скорость вращения определяется датчиком 9 и бло- ком 11. При разгоне баланса блок 11 измеряет каждый период вращения, вычисляет скорость, запоминает и передает в ОЗУ 20. Затем производит кусочно-линейную аппроксимацию u f{t) и запоминает получен- ные коэффициенты. Текущее значение скорости определяется как
од ед-1+ Ki (ti-tn).
где й)| - значение текущей скорости вращения;
0)1-1 -значениескорости, измеренной за предыдущий оборот:
ti - момент времени определения текущей скорости;
ti-i - момент времени определения ско- рости, измеренной за предыдущий оборот;
KI - коэффициент связи, хранящийся в ПЗУ24,
и выдается в блок 12 определения времени разгона, в котором время измерения неуравновешенности вычисляется по формуле
1изм. to Краз. + tycn ,
где to - фиксированный интервал времени, необходимый для приведения тела во вращение и получения информации и датчика скорости;
tpaa - время, в течение которого на тело воздействует привод вращения и которое рассчитывается в зависимости от величины скорости вращения, набранной к моменту to;
tycn. - время, необходимое для успокоения баланса.
Величина to выбирается из условия to 0,5 1раз.мин, где 1раз.мин - величина времени разгона для балансов с минимальным трением, и выдается в блок 13 индикации и в блок 8 управления и вычисления. При времени разгона больше номинального (допустимого) пользователь делает вывод о технологическом браке, и процесс уравновешивания не производится. Если же время разгона соответствует норме, тб по достижении необходимого значения времени разгона блок 8 с помощью привода 3 разгона переходит в режим поддержания постоянной скорости вращения. Микро- ЭВМ 19 сравнивает значение текущей скорости со с поддерживаемой постоянной скоростью Mconst и в случае ад Wconst микроЭВМ 19, через силовые ключи 21 включает клапан привода 3 разгона, а в случае ft ftfconst выключает его. Если же время разгона соответствует норме, то блок 6 измерения амплитуды по сигналу с датчика 5 дисбаланса производит измерение амплитуды дисбаланса, обеспечивает преобразование сигнала дисбаланса в цифровую форму, а также формирует сигнал в блок 8 и блок 7 при прохождении его с датчика 5 дисбаланса через 0. Блок 7 производит расчет фазы тяжелой точки на основании временного поступления сигналов с блока б измерений амплитуды, определяет необходимую длительность импульса ОКГ4, которую устанавливает пропорционально величине неуравновешенности и вырабатывает сигналы управления ОКГ4 начало излучения, конец излучения, причем временное положение этих сигналов относительно импульса с датчика 9 скорости блок 8 определяет в зависимости от фазы. При измерении фазы определяется по формуле
(р (ten + to) (о + С , ,
где 1си - время поступления сигнала с датчика скорости;
to время перехода сигнала с датчика дисбаланса через 0 (из бл. 8);
(о- значение текущей скорости;
С - определяет взаимное угловое положение ОКГ4, датчика 9 скорости и датчика 5 дисбаланса, определяется экспериментально.
Момент подачи импульсов на начало и конец излучения определяется при обработке относительно импульса с датчика скорости по формуле
ff-КдМ (О
0+.КАМ Ш
где р - фаза дисбаланса;
М - амплитуда дисбаланса;
ы - текущее значение скорости;
Кд - коэффициент пропорциональности, связывающий величину устраняемого дисбаланса с длительностью излучения, определяется экспериментально.
При этом на ободе вращающегося тела 1 образуется риска, симметрично расположенная относительно тяжелой точки, длина которой пропорциональна амплитуде дисбаланса. По сигналу конец излучения блок 8 повторяет цикл измерения амплитуды дисбаланса, и, если остаточная величина его находится в допуске, отключает привод
-СЬ 9
:
3 разгона и включает привод 10 торможения. По информации о скорости вращения из блока 11 блок 8 определяет момент останова тела вращения и выключает привод 10
торможения. Цикл балансировки закончен. Формула изобретения Устройство для уравновешивания вращающихся тел, содержащее оптический квантовый генератор, последовательно соединенные датчик дисбаланса, блок измерения амплитуды, блок определения фазы и блок управления и вычисления, второй вход которого соединен со вторым выходом блока измерения амплитуды, датчик скорости,
выход которого соединен со вторым входом блока определения фазы и третьим входом блока управления и вычисления, и соединенный с первым выходом последнего привода разгона,отличающееся тем,что,
с целью повышения производительности, оно снабжено приводом торможения, вход которого соединен со вторым выходом блока управления и вычисления, и последовательно соединенным блоком определения
скорости, вход которого соединен с вцхо- дом датчика скорости, блоком определения разгона и блоком индикации, второй вход которого соединен с третьим выходом блока управления и вычисления, четвертый выход
которого соединен с оптическим квантовым генератором, четвертый вход - с выходом блока определения времени разгона, а пятый вход - с выходом блока определения скорости и третьим входом блока определения фазы.
фи.еЛ-
KPW6BE039
ft
15
7 8
16
К572Ш
r
Фиг. 2
КРШВЕ039
flopm йводсг
ILIf
20 К573РФ1
КР18ШЕ039
23 №37РУЮ
24 К573РФ1
KP18168EOW
ff
18
М573РФ1
6911
Фиг.З
в
f
11 9 6 7
21
v Ч
Ok. 3 Ю
22
/ь
ff2
Фиг. 5
КР1816 вЕ039
(Риг. 6
н
tffyff#
а
Я
Х &/7РЗ
| Устройство для уравновешивания вращающихся тел | 1980 |
|
SU945695A1 |
| Устройство для уравновешивания вращающихся тел | 1981 |
|
SU1017938A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
