; -. ; 1
Изоб,ретение относится к балансировочной технике и может быть использовано в приборостроении для автоматизации процесса уравновешивания балансов часов.
Известно устройство для уравновешивания вращающихся тел, содержащее привод вращения, датчик дисбаланса, установленный в механических опорах, сигнал с которого, пропорциональный величине и фазе дисбаланса, поступает через блок синхронизации на управляющий вход оптического квантового генератора для удаления материала с поверхности тела, блок регулирования скорости вращения, преобразователь напряжение - код и блок задержки D.
Однако это устройство имеет недостаточную точность уравновешивания, связанную с неоднократным воздействием на тело импульсом большой мощности.
; Наиболее близким по технической СУИ1НОСТИ и достигаемому результату к изобретению является устройство для уравновешивания вращающихся тел, содержащее триггер, блок регулирования скорости вращения, первый вход которого соединен с выходом триггера блок выбора канала, первый вход которого соединен с первым выходом f
IQ блока регулирования, оптический квантовый генератор для удаления материала с поверхности тела, вход которого соединен с выходом блока выбора канала, привод вращения, соедиеннный
15 с вторым выходом блока регулирования датчик скорости вращения, выход которого соединен с вторым входом блока регулирования, преобразователь напряжение-код, блок задержки и датчик дисбаланса, соединенный выходом с входом блока задержки и с первым входом преобразователя, второй вход которого соединен с третьим выходом блока регулирования, блок формирования импульсов заполнения, блок смещения и запоминания фазы дисбаланса, выход которого связан с ОКГ, первый вход - с датчиком дисбаланса а второй вход - с датчиком скорости вращения, блок контроля программы, при этом второй вход блока регулирования соединен с третьим входом блока смещения и запоминания фазы дисбаланса, через блок формирования им пульсов с четвертым аходой.блока смемещения и запоминания фазы дисбаланса, пятый вход которого соединен с выходом блока задержки, шестой - с первым выходом блока регулирования и с первым входом блока контроля программы, седьмой - с третьим входом блока регулирования, с первым выходом блока контроля программы и .с вторым входом блока контроля программы, . третий вход которого соединен с выходом преобразователя,вто|рой выход его соединен с входом триг гера, выход блока формирования импульсов связан с восьмым входом блок смещения и запоминания фазы дисбалан са, вход которого связан сдатчиком; скорости вращения t21. Однако известное.устройство также имеет недостаточную точность, связанную с тем, что запомненнре в мо- мент достижения резонансной скорости преобразователем напряжение-код чиспо, пропорциональное величине неуравновешенности тела, сравнивается в блоке контроля программы с числом воздействий лазерного луча ОКГ н вращающееся тело тяжелой точки. Точного соответствия числа воздействий и величины неуравновешенности определить заранее не Представ ляется возможным, так как это связан с нестабильностью мощности излучения и с качеством поверхности тела в зоне воздействия. Возникающая опасность перебалансировки заставляет держать коэффициент соответствия числа воздействий и величины неуравновешенности заниженным, что 8 конечном счете также снижает точность уравновешивания. Цель изобретения - повышение точности уравновешивания. Поставленная цель достигается тем что устройство, содержащее привод вращения тела, датчик дисбаланса датчик скорости вращения, оптический квантовый генератор (ОКГ), блок смещения и запоминания фазы дисбаланса.
выход которого связан с ОКГ, первый вход - с датчиком дисбаланса, а второй вход - с датчиком скорости враще ния, и блок формирования импульсов
заполнения, вход которого соединен с датчиком скорости вращения, а выход - с третьим входом блока смещения и запоминания фазы дисбаланса, снабжено аналоговым блоком запоминания
амплитуды дисбаланса, первый вход . которого связан с датчиком дисбаланса, блоком выработки управляющих команд, первый вход которого связан с датчиком скорости вращения, первый
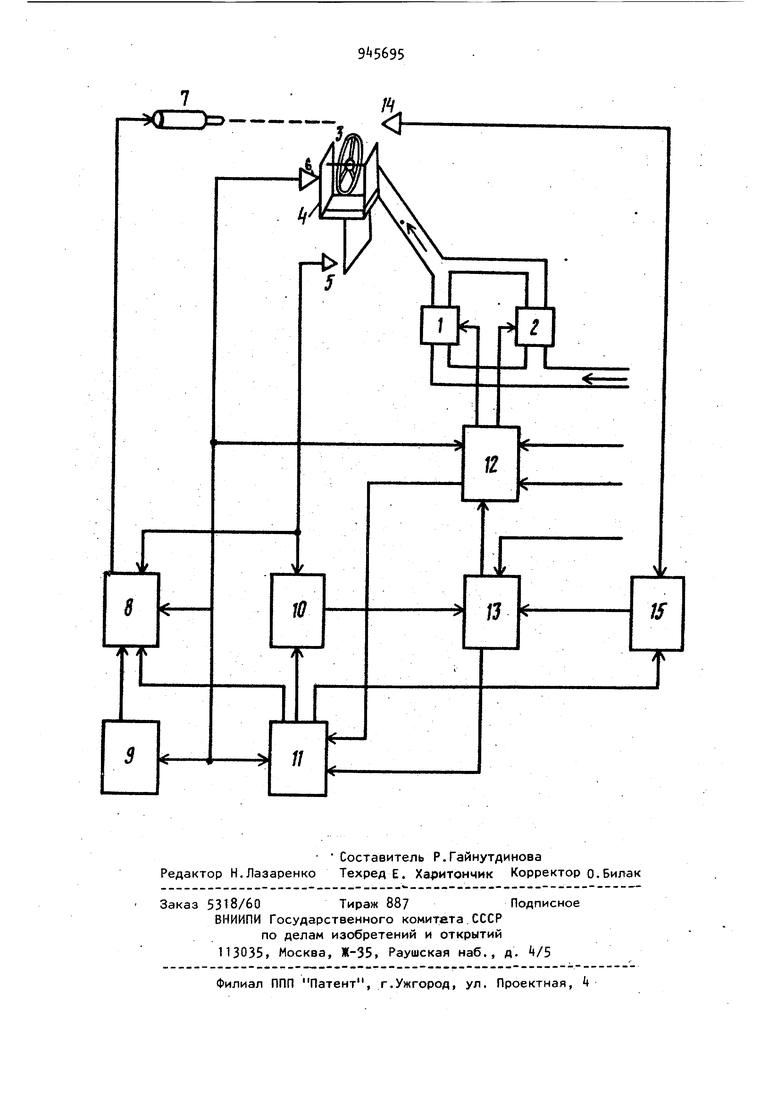
выход - с вторым входом аналогового блока запоминания амплитуды дисбалан- . са, а второй выход -с четвертым входом блока смещения и запоминания фазы дисбаланса, блоком автоматического поддержания резонансной скорости вращения, первый вход которого соединен с датчиком скорости вращения, первый выход с вторым входом блока выработки управляющих команд, а второй и третий выходы С приводом вращения тела, блоком сравнения, первый выход которого связан с вторым входом блока автоматического поддержания резонансной скорости вращения, второй выход - с третьим входом блока выработки управляющих команд, датчиком количества корректирующей массы и интегратором, первый вход которого связан с датчиком количества корректирующей массы, второй вход - с третьим выходом блока выработки управляющих команд, а выход - с первым входом блока сравнения, второй вход которого связан с выходом аналогового блока запоминания амплитуды дисбаланса. На чертеже изображено устройство для уравновешивания вращающихся тел. Устройство содержит привод 1 и 2 вращения тела 3, установленного в опоре t, датчик 5 дисбаланса, датчик 6 скорости вращения, ОКГ 7, блок 8 смещения и запоминания фазы дисбаланса, выход которого связан с ОКГ 7, первый вход - с датчиком 5 дисбаланса, а второй вход с датчиком 6 скорости вращения, блок 9 формирования импульсов заполнения, вход которого соединен; с датчиком 6 скорости вращения, а выход - с третьим входом блока 8 смещения и запоминания фазы дисбаланса, аналоговый блок 10 запоминания амплитуды дисбаланса, первый вход которого связан с датчиком 5 дисбаланса, блоком 11 выработки управляющих команд, первый вход которого связан с датчиком 6 скорост вращения, первый выход - с вторым входом аналогового блока Ю запоминания амплитуды дисбаланса, а второй выход - с четвертым входом блока 8 смещения и запоминания фазы дисбалан са, блоком 12 автоматического поддер жания резонансной скорости вращения, первый вход которого соединен с датчиком 6 скорости вращения, первый выход - с вторым уходом блока 11 выработки управляющих команд, а второй и третий выходы - с приводом вращени тела 1, блоком 13 сравнения, первый выход которого связан с вторым входом блока 12 автоматического поддержания резонансной скорости вращения, второй выход - с третьим входом блока 11 выработки управляющих команд, датчиком И количества корректирующе массы и интегратором 15, первый вход которого связан с датчиком f количества корректирующей массы, второй вход - с третьим выходом блока 11 вы работки управляющих команд, а выходс первым входом блока 13 сравнения, второй вход которого связан с выходом анало гового блока 10 запоминания амплитуды дисбаланса. Устройство работает следующим образом. Сигнал Пуск, поступающий в блок 12 автоматического поддержания резонансной скорости вращения, вызывает открытие клапана не показан) начального разгона привода 1 вращения тела 3, и тело 3 начинает раскручиваться. Скорос-ть раскручиваемого тела контролируется блоком 12 и, как только она достигнет величины резонансной скорости, клапан начального разгона привода закрывается, блок 12 переходит в режим автоматического поддержания скорости вращения тела 3 около резонансной. Сигнал из блока 12 поступает в блок 11, и последний вырабатывает команду Измерение амплитуды, по которой в аналоговом блоке 10 запоминания амплитуды фиксируется амплитуда дисбаланса, снимается с датчика 5. По первому же импульсу с датчика 6 скорости вращения блок 11 вырабатывает команду Исполнение, которая поступает в блок 8, и этот блок начинает вырабатывать импульсы исполнения в блок оптического квантового генератора Фаза импульсов исполнения относительно начала оборота тела 3, с учетом статических и динамической поправок, соответствует моменту прохождения тяжелой точки тела 3 в месте действия лазерного луча. Датчик И регистрирует результат воздействия лазерного луча на материал вращающегося тела 3. По команде Исполнение интегратор 15 наминает накапливать импульсы с датчика И, и, как только напряжение на выходе интегрсчтора 15 достигнет величины напряжения на выходе блока 10 запоминания амплитуды дисбаланса, т.е. количество корректирующей массы сравняется с величиной первоначального дисбаланса, в блок 11 поступает сигнал Конец обработки. Блок 11 переходит в режим контроля амплитуды дисбаланса. Так как тело 3 вращается со скоростью, близкой к резонансной, в блоке 10 фиксируется величина остаточного дисбаланса,:которая сравнивается с допуском в блоке 13, и, если величина разбаланса оказывается в пределах допуска, процесс уравновешивания заканчивается. Схема возвращается в исходное состояние, клапаны приводов закрываются, уравновешенное тело 3 удаляется из опоры k, Предлагаемое устройство для уравновешивания вращающихся тел позволяет повысить точность уравновешивания за счет высокой точности обработки сигнала резонансной скорости вращения и сигнала датчика количества корректирующей массы. Формула изобретения Устройство для уравновешивания вращающихся тел, содержащее привод вращения тела, датчик дисбаланса, датчик скорости вращения, оптический квантовый генератор СОКГ), блок смещения и запоминания фазы дисбаланса, выход которого связан с ОКГ, первый вход -с датчиком дисбаланса, а второй вход с датчиком скорости вращения, и блок формирования импульсов заполнения,вход которого соединен с датчиком скорости вращения, а выход - с третьим входом блока смещения и запоминания фазы дисаланса, отличающееся тем. что, с целью повышения точности урав новешивания, оно снабжено аналоговы блок6.м запоминания амплитуды дисбаланса,- первый вход которого связан с датчиком дисбаланса, блоком выра ботки управляющих команд, первый вход которого связан с датчиком скорости вращения, первый выход - с вторым входом аналогового блока запоминания амплитуды дисбаланса, а второй выход .с четвертым входом блока смещениям поминания фазы дисбаланса, блоком автоматического поддержания резонанс ной скорости вращения,первый вход ко Тррого соединен с датчиком скорости вращения, первый выход - с вторым входом блока выработки управлямяцй команд,а второй и третий выходы-с пр водом вращения тела,блоком сравнения первый выход которого связан с вторым входом блока автоматического поддержания резонансной скорости врашения, второй выход - с третьим входом блока выработки управляющих команд, датчиком количества корректирущей массы и интегратором,первый вход которого связан с датчиком количества корректирующей массы, второй вход - с третьим выходом блока выработки управляющих команд, а выход - с первым входом блока сравнения, второй вход которого связан с выходом анало ового блока запоминания амплитуды дисбаланса . Источники информации, принятые во внимание при экспертизе Т. Авторское свидетельство СССР № 512669, кл. G 01 М 1/24, 1976. 2. Авторское свидетельство СССР . If 567293, кл. G 01 М 1/24, 1976 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для уравновешивания вращающихся тел | 1981 |
|
SU1017938A1 |
| Устройство для уравновешивания вращающихся тел | 1990 |
|
SU1747972A1 |
| Устройство для уравновешивания вращающегося тела | 1976 |
|
SU657293A1 |
| Устройство для динамической балансировки роторов | 1985 |
|
SU1293508A1 |
| Устройство для автоматической балансировки роторов гироскопов | 1985 |
|
SU1226090A1 |
| Измерительное устройство к баланси-РОВОчНОМу СТАНКу | 1979 |
|
SU853446A1 |
| Способ двухцикловой балансировки роторов и устройство для его осуществления | 1987 |
|
SU1446506A1 |
| Устройство для управления пуском скоростного лифта | 1984 |
|
SU1414745A1 |
| Устройство контроля скорости | 1983 |
|
SU1111190A1 |
| Измерительное устройство к балансировочному станку | 1985 |
|
SU1226086A1 |