фиг.2
Изобретение относится к тракторному и сельскохозяйственному машиностроению,
Известен способ стабилизации направления движения МТА, при котором создают касательные силы тяги на движителях бортов путем равного распределения крутящего момента между ними. Вследствие того, что (сцепные качества t почвы являются случайной функцией ее физико-механических Свойств, касательные силы тяги движителей разных бортов при таком способе стабилизации направления движения определяются не только крутящими моментами, но и условиями сцепления с почвой, причем реализуемый в тягу крутящий момент будет определяться движителем, находящимся в худших по сцеплению условиях. Это приводит к повышенному буксованию и, как следствие, уменьшению скорости поступательного движения, а также повышает склонность к боковому уводу при переезде колесными движителями различных по высоте препятствий...-.. ,,v.,,: Уменьшение поступательной скорости движения приводит к снижению производительности, увеличению погектарного расхода топлива и нарушению агротребований по максимальному буксованию.
Известен способ стабилизации направления движения МТА, при котором создают касательные силы тяги на движителях бортов путем равномерного распределения мощности между ними. Такой способ характеризуется тем, что сила тяги МТА будет определяться суммой касательных сил тяги движителей. Но так как касательная силы тяги каждого движителя будет определяться условиями его сцепления с почвой, то касательные силы тяги по бортом будут неодинаковы, что приведет к появлению поворачивающего момента. Указанный момент вызывает неуправляемый поворот агрегата в сторону движителей, имеющих худшее сцепление с почвой, что приводит к ухудшению качества выполняемой технологической операции, повышению расхода топлива, увеличению напряженности труда водителя, уменьшению производительности.
В качество базового способа стабилизации направления движения МТА принят способ, при котором создают касательные силы тяги при условии минимального отклонения органов управления направлением движения от положения соответствующего прямолинейному движению.
Применение такого способа на полях с длинными гонами и выравненной однородной поверхностью почвы позволяет повысить качество выполняемых технологических операций, уменьшить напряжённость труда водителя. Однако при сложной конфигурации полей этот способ неприменим, так
как рассогласование угловых скоростей движителей разных бортов приводит к появлению неуправляемых отклонений от заданного направления, а следовательно, ухудшается качество работы, повышается
0 расход топлива.
Известен способ стабилизации направления движения МТА, при котором касательные силы тяги выравнивают по движителям бортов путем обеспечения равенства их ча5 стот вращения независимо от направления движения. Такой способ применяют на полях различной конфигурации.
Недостатками прототипа являются ухудшение управляемости энергосредства
0 из-за увеличения момента сопротивления повороту; забрасывание ведущего моста относительно ведомого при переезде первым препятствий, высота которых неодинакова по движителям разных бортов. Кроме того,
5 в нем не учитывается разность касательных сил тяги движителей разных бортов из-за различных почвенных условий, что приводит к неуправляемому повороту агрегата. Цель изобретения - повышение курсо0 вой устойчивости агрегата.
Предлагаемый способ содержит перечень операций, последовательность выполнения которых позволяет в момент появления рассогласования по частоте вра5 щения потерю энергии бортовых движителей при переезде ими препятствий компенсировать увеличением момента на отстающем движителе путем подъема оси плечевого колеса относительно оси запазт
0 дывающего движителя на величину высоты преодолеваемого препятствия для чего складывает его с крутящим моментом, распределенном в равном отношении между колесными движителями правого и левого
5 бортов.
Новыми существенными признаками предлагаемого способа являются: увеличение крутящего момента на оси запаздывающего колесного движителя численное
0 значение которого определяют потенциальной энергией затраченной на преодоление этим колесным движителем препятствия; угловое вращение оси запаздывающего колесного движителя плечевым колесом при
5 появлении взаимновертикального перемещения колесного движителя и оси плечевого колеса: согласование момента вращения на запаздывающем колесном движителе с моментом вращения опережающего колесного движителя.
Введение новых существенных признаке в позволяет при преодолении колесными движителями препятствий разной высоты д))я левого и правого бортов повысить кур- сёвую устойчивость МТА..
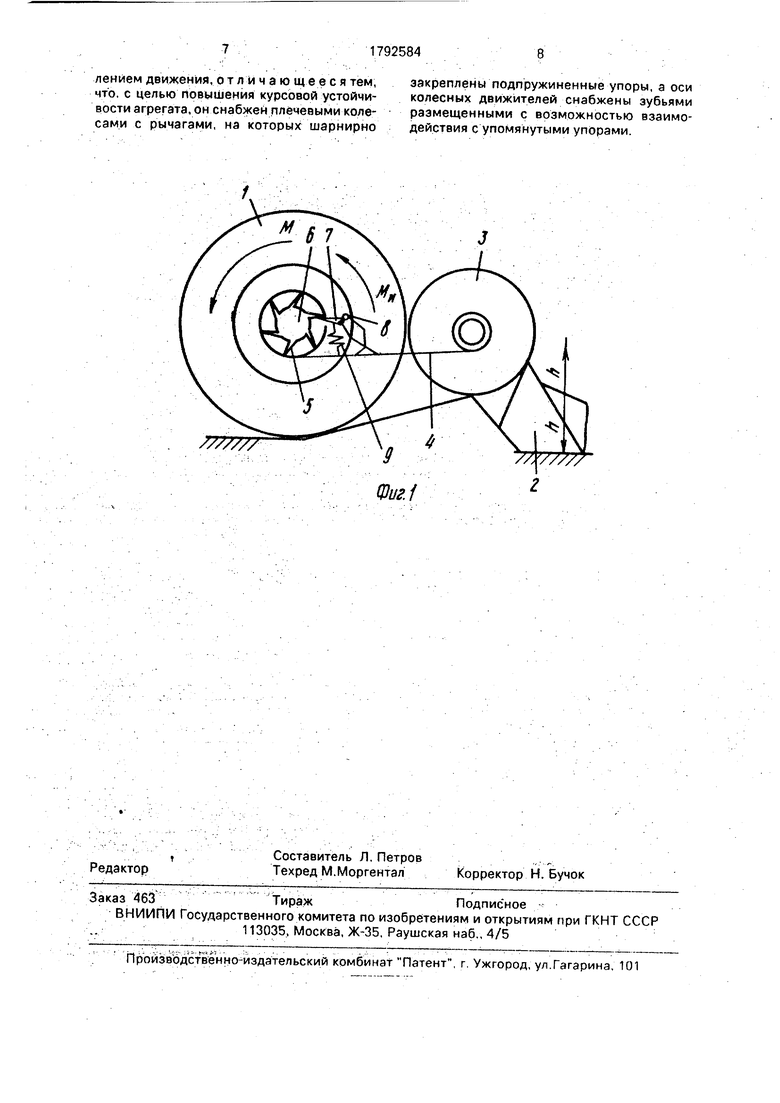
На фиг,1 представлен конкретный пример выполнения способа стабилизации направления движения МТА; на фиг.2 - устройство для реализации предложенного способа, установленное на колесные дви- жители.
Способ стабилизации направления движения МТА осуществляет следующим образе м. На колесные движители 1 подают крутящий момент Мп и осуществляют их пе- ре|мещение относительно естественных препятствий 2. Вследствие того, что величи- нг высоты h естественных препятствий яв- лгется функцией физико-механических свойств почвы и механических воздействий нг нее различных с-х орудий, сопротивление перекатыванию колесных движителей 1 будет различным для правого и левого бор- то в. Это приводит к перераспределению крутящего момента М между колесными движителями 1 в большую сторону на колес- нс(м движителе, для которого высота h имеет превалирующее значение, что приводит к за|беганию вперед колесного движителя с меньшей высотой h и забрасыванию задне- го: моста в целом. В момент преодоления вЦсоты h естественного препятствия 2 плечевым колесом 3 посредством рычага 4 воз- де йствуют на зубья 5, которые закрепляют на| оси б упором 7. При езде в условиях наличия естественных препятствий 2 зубья 5 поворачивают упор 7 в шарнире 8 который закрепляют на рычаге 4 кронштейном 10 и пбдпружинивают пружиной 9. В результате осуществления такого перечня операций колесному движителю 1 сообщают плечевой момент Мп, и складывают его с моментом М, что устраняет явление забрасывания заднего моста МТА при преодолении им естественных препятствий,
Устройство для реализации предложенного способа установлено на колесные движители 1 (фиг.2), Плечевое колесо 3 закреплено рычагом 4 относительно зубьев 5, закрепленных на оси 6. Упор 7 шарниром 8 и пружиной 9 кронштейном 10 закреплен на рычаге 4, на котором установлен фиксатор 11. К втулкам 12. 13 подсоединен рычаг 4, в средней части которого установлена регулировочная муфта 14. Плечевое колесо 3 закреплено на оси 15. Ведущие колеса 1 осью б закреплены на МТА 16.
Устройство работает следующим образом. Преодоление естественного препятствия 2 (фиг.1) колесным движителем 1 (фиг.2) плечевое колесо 3 перекатывается, копируя выступ естественного препятствия. При завершении преодоления естественного препятствия колёсными движителями 1 ось 6 стремится занять нижнее положение по отношению к оси 15 плечевого колеса 3 при отсчете положения осей относительно поверхности почвы по вертикале. Вследствие такого взаимного перераспределения положения осей 6 и 15 рычагом 4 и упором 7 воздействуют на зубья 5 и б, прикладывают плечевой момент, что способствует доворо- ту отстающего колесного движителя 1 на угол рассогласования по частоте вращения с опережающим колесным движителем.
При отсутствии естественных препятствий, отличающихся по высоте, под колесными движителями 1 правого и левого бортов осью 6 зубья 5 воздействуют на упор 7, растягивают пружину 9. Такой перечень операций способствует свободному вращению осей 6 и 15 друг относительно друга.
При движении задним ходом МТА 1 выводят из зацепления с зубьями 5 упор 7.
Очевидно, что изобретение не ограничивается вышеописанным примером его осуществления. Исходя из него могут быть предусмотрены и другие варианты, не выходящие за рамки изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ стабилизации направления движения машинно-тракторного агрегата и устройство для стабилизации направления движения машинно-тракторного агрегата | 1990 |
|
SU1750450A1 |
| "Способ стабилизации направления движения машинно-тракторного агрегата по методу "Инерционный парус" | 1988 |
|
SU1645180A1 |
| НАВЕСНОЕ УСТРОЙСТВО ТРАКТОРА | 2015 |
|
RU2611837C1 |
| СПОСОБ ВОЖДЕНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА | 2007 |
|
RU2340502C1 |
| СПОСОБ УЛУЧШЕНИЯ ТЯГОВО-СЦЕПНЫХ ПОКАЗАТЕЛЕЙ МАШИННО-ТРАКТОРНОГО АГРЕГАТА С НАВЕСНЫМ ПОЧВООБРАБАТЫВАЮЩИМ ОРУДИЕМ | 2011 |
|
RU2485743C1 |
| Буксирно-сцепное устройство с вертикальным регулированием | 2022 |
|
RU2780711C1 |
| Сельскохозяйственный агрегат | 1988 |
|
SU1595362A2 |
| ПОЧВООБРАБАТЫВАЮЩИЙ ПОСЕВНОЙ АГРЕГАТ | 2009 |
|
RU2414112C1 |
| СПОСОБ ОЦЕНКИ ПАРАМЕТРОВ СЕЛЬХОЗМАШИНЫ | 1989 |
|
RU2023359C1 |
| Способ управления мобильным агрегатом и устройство для его осуществления | 1988 |
|
SU1808233A1 |
Использование: в тракторном и сельскохозяйственном машиностроении, а именно, для стабилизации направления движения машинно-тракторных агрегатов (МТА). Сущность изобретения: МТА снабжен плечевыми колесами 3, на которых шарнирно закреплены упоры 7, взаимодействующие с зубьями 5 колесных движителей 1. 2 с.п. ф-лы, 2ил.
Формула изобретения 1. Способ стабилизации направления движения машинно-тракторного агрегата, включающий выравнивание скоростей бортовых движителей трактора, отличающийся тем. что, с целью повышения курсовой устойчивости агрегата при встрече с препятствиями, компенсируют потерю скорости на отстающем колесном движителе увеличением на нем движущего момента пропорционально величине высоты преодолеваемого препятствия.
закреплены подпружиненные упоры, а оси колесных движителей снабжены зубьями размещенными с возможностью взаимодействия с упомянутыми упорами.
