Изобретение относится к области сельскохозяйственного машиностроения, в частностикконструкцииподъемно-погрузочных устройств стогово- зов, и может быть использовано как в мобильных машинах, так и в стационарном прифермерском оборудовании.
Известна пальцевая решетка стоговоза содержащая привод, поперечный (несущий) брус с закрепленными на нем внедряющимися в стог пальцами, внутри которых расположены штоки с наконечниками, соединенные с шатунами коленчатого вала (механизма передачи привода) для создания возвратно-поступательного движения наконечников с целью эффективного внедрения в стог или тюк сена, соломы, причем
пальцы и механизм передачи установлены на поверхности поперечного бруса.
Недостатком указанной конструкции является высокая материалоемкость в связи с наличием большого числа пальцев, недостаточная надежность удержания тюков при захвате и перемещении, возможность образования зазоров при укладке тюков в штабель, а также возможность повреждения тюков при захвате и снятии их с проникающих элементов в связи с вибрацией.
Кроме того, низкая надежность работы механизма передачи обусловлена возможностью засорения его сено-соломистым материалом.
Известен стоговоз, содержащий агрега- тированный с подъемно-транспортным средством несущий брус, на котором устаV|
СЯ О
4 00
о
новлены проникающие элементы в виде пальцев грабельной решетки с приводом, причем концы пальцев выполнены вращающимися.
Недостатками такого стоговоза являются невозможность укладки формованных материалов в штабели, т.к. он предназначен только для перемещения стогов с одного места в другое, низкая надежность удержания захваченных масс сена, соломы, т.к. при погрузке стогов на стоговоз или разгрузке захваченные массы будут сползать с проникающих элементов, а также высокая материалоемкость в связи с большим количеством пальцев грабельной решетки.
Целью изобретения является повышение надежности захвата, обеспечение плотности укладки формованных волокнистых материалов (тюков) в штабель без зазора, а также снижение материалоемкости,
Указанная цель достигается тем, что в известной конструкции захвата, содержащей агрегатированный с подъемно-транспортным средством несущий (поперечный) брус, на котором установлены подвижные проникающие элементы с приводом, проникающие элементы выполнены в виде вин- товых стержней, расположенных в вершинах вписанного в плоскость бруса треугольника, внутри которого размещен реверсивный механизм передачи вращения проникающих элементов, при этом энергетическая цепь оснащена автоматическим выключателем, выполненным в виде рычаж- но-поворотного механизма и установленным на брусе со стороны проникающих элементов, а энергетическая цепь и привод могут быть выполнены электрическими или гидравлическими. Кроме того, подъемное транспортное средство реализовано в виде кран-балки с возможностью пространственного (трехстепенного) перемещения.
Автоматический выключатель необходим для предотвращения разрушения тюка винтовыми стержнями, т.к. после сближения (до упора) с брусом винтовые стержни будут извлекать (выдергивать) материал из тюка, что, в свою очередь, приведет к сходу тюка со стержней-захватов.
Сопоставительный анализ с прототипом позволяет сделать вывод, что заявленное устройство для захвата, перемещения и укладки волокнистых материалов отличается количеством пальцев и выполнением их в виде винтбвых, проникающих в тюк стержней, расположением соединений стержней с валами механизма передачи в плоскости несущего бруса в вершинах треугольника, наличием автоматического выключателя, выполненного в виде
рычажно-поворотного механизма в электрической или гидравлической цепи подвода энергии, расположением механизма передачи внутри несущего бруса, а также выполнением подъемно-транспортного средства в виде кран-балки.
Таким образом, заявленное устройство соответствует критерию изобретения новизна.
0 Сравнение заявленного решения не только с прототипом, но и с другими техни- ческими решениями (аналогами) и с техническими решениями в смежных областях (подъемные механизмы) не выявило в них
5 признаков, отличающих заявленное решение от прототипа, что позволяет сделать вывод о соответствии критерию изобретения существенные отличия.
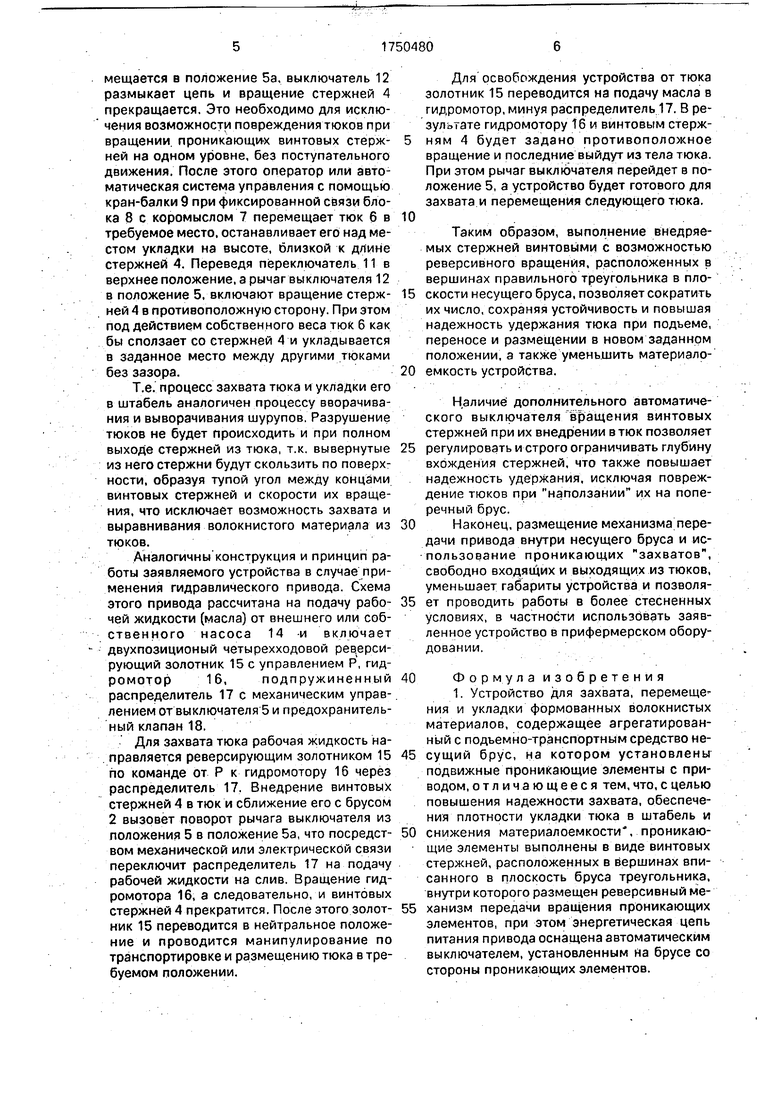
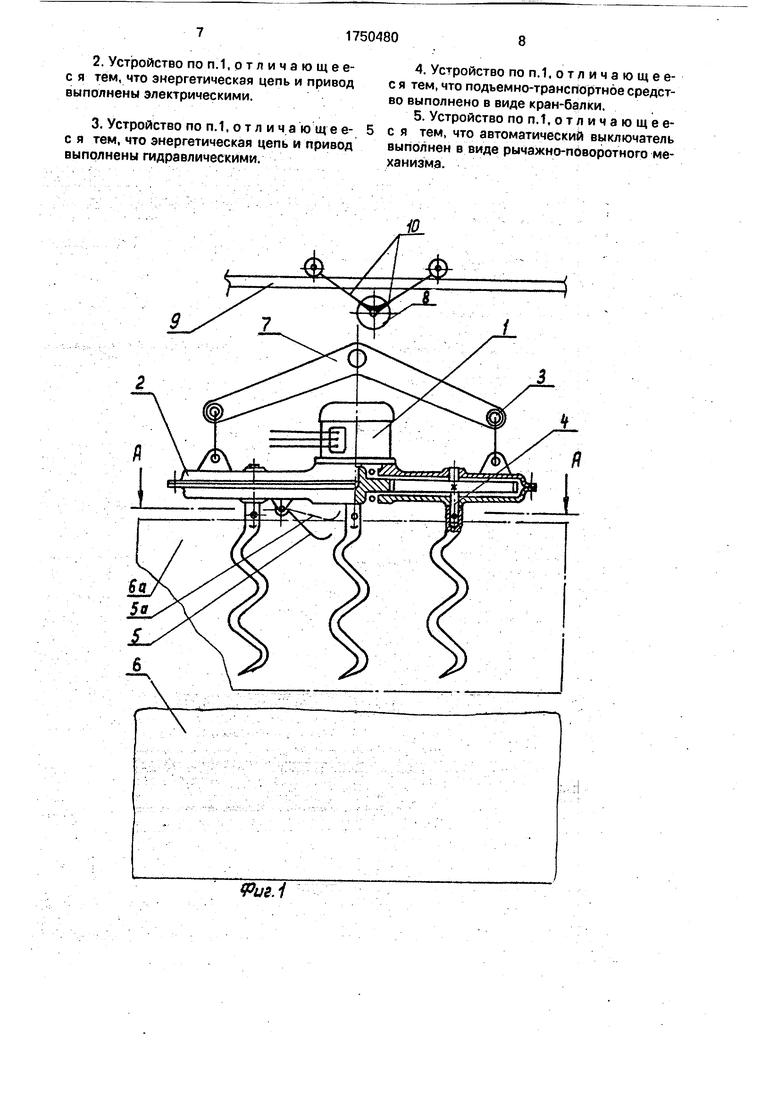
На фиг.1 представлено устройство для
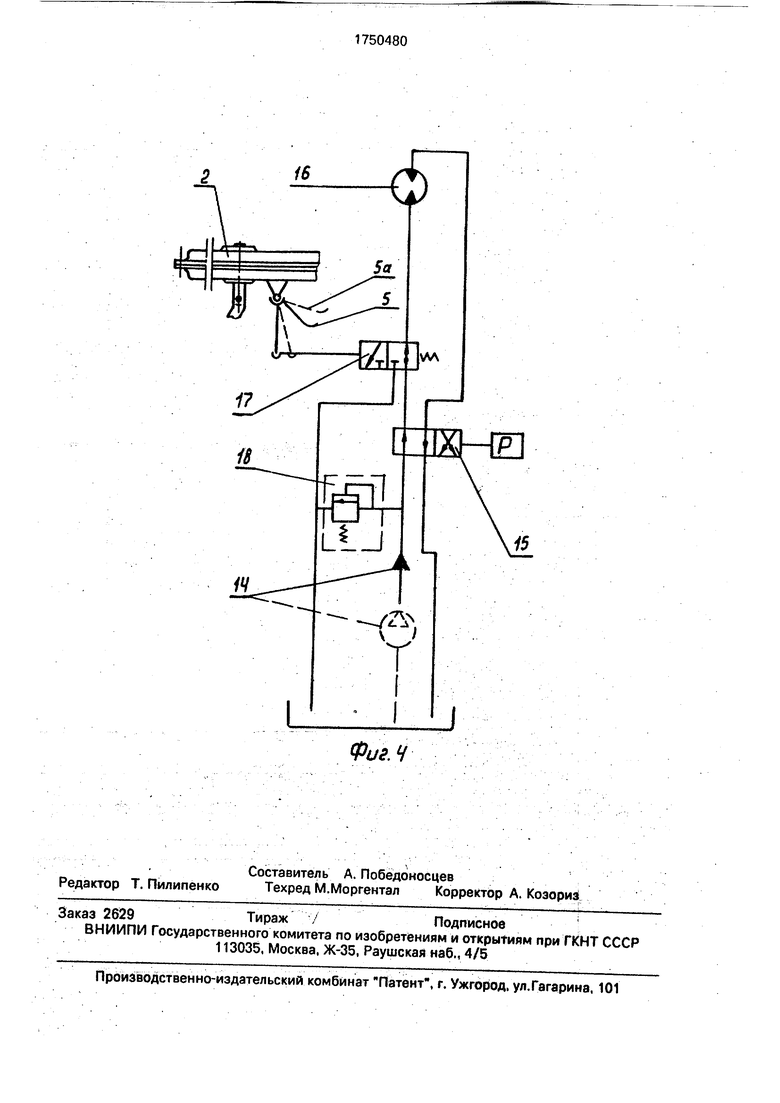
0 подъема и перемещения формованных сено-соломистых материалов, вид сбоку; на фиг.2 - разрез А-А на фиг.1; на фиг.З и 4 - соответственно электрическая и гидравлическая схемы управления приводом с авто5 матическим выключателем.
Устройство для захвата, перемещения и укладки волокнистых материалов (например, тюков соломы или сена) содержит электродвигатель 1, установленный на несущем
0 бурсе 2, внутри которого размещен механизм передачи 3, выходные валы которого соединены с винтовыми стержнями (пальцами) 4. Рычаг автоматический выключателя привода 5 расположен на поверхности несу5 щего бруса (положение рычага 5а при достижении тюком положения 6а). К брусу 2 прикреплен узел агрегатирования, включающий коромысло 7 и блок 8 для подвески устройства к кран-балке 9 с помощью карет0 ки 10.
Электрическая схема содержит трехпо- зиционный переключатель 11 для подключения электродвигателя в сеть и реверсирования работы двигателя, автома5 тический выключатель 12 и систему проводов 13.
Устройство работает следующим образом: с помощью кран-балки 9 устройство подводится к тюку б и опускается с по0 мощью блочной системы 8, 9,10 до касания стержнями 4 поверхности тюка 6. Затем установкой переключателя 11 в нижнее положение (фиг.З), рычаг автоматического выключателя 12 при этом находится в поло5 жении 5, включается вращение стержней 4, которые под действием веса бруса 2 внедряются (вворачиваются) в тюк 6, при этом связь блока 8 с коромыслом 7 свободна. При достижении брусом 2 поверхности тюка 6 автоматического выключателя перемещается в положение 5а, выключатель 12 размыкает цепь и вращение стержней 4 прекращается. Это необходимо для исключения возможности повреждения тюков при вращении проникающих винтовых стержней на одном уровне, без поступательного движения. После этого оператор или автоматическая система управления с помощью кран-балки 9 при фиксированной связи блока 8 с коромыслом 7 перемещает тюк 6 в требуемое место, останавливает его над местом укладки на высоте, близкой к длине стержней 4. Переведя переключатель 11 в верхнее положение, а рычаг выключателя 12 в положение 5, включают вращение стержней 4 в противоположную сторону. При этом под действием собственного веса тюк 6 как бы сползает со стержней 4 и укладывается в заданное место между другими тюками без зазора.
Т.е. процесс захвата тюка и укладки его в штабель аналогичен процессу вворачивания и выворачивания шурупов. Разрушение тюков не будет происходить и при полном выходе стержней из тюка, т.к. вывернутые из него стержни будут скользить по поверхности, образуя тупой угол между концами винтовых стержней и скорости их вращения, что исключает возможность захвата и выравнивания волокнистого материала из тюков.
Аналогичны конструкция и принцип работы заявляемого устройства в случае применения гидравлического привода. Схема этого привода рассчитана на подачу рабочей жидкости (масла) от внешнего или соб- ственного насоса 14 и включает двухпозиционый четырехходовой реверсирующий золотник 15 с управлением Р, гидромотор 16, подпружиненный распределитель 17 с механическим управлением от выключателя 5 и предохранительный клапан 18.
Для захвата тюка рабочая жидкость направляется реверсирующим золотником 15 по команде от Р к гидромотору 16 через распределитель 17. Внедрение винтовых стержней 4 в тюк и сближение его с брусом 2 вызовет поворот рычага выключателя из положения 5 в положение 5а, что посредством механической или электрической связи переключит распределитель 17 на подачу рабочей жидкости на слив. Вращение гидромотора 16, а следовательно, и винтовых стержней 4 прекратится. После этого золотник 15 переводится в нейтральное положение и проводится манипулирование по транспортировке и размещению тюка в требуемом положении.
Для освобождения устройства от тюка золотник 15 переводится на подачу масла в гидромотор, минуя распределитель 17. В ре- зулатате гидромотору t6 и винтовым стерж5 ням 4 будет задано противоположное вращение и последние выйдут из тела тюка. При этом рычаг выключателя перейдет в положение 5, а устройство будет готового для захвата и перемещения следующего тюка.
0
Таким образом, выполнение внедряемых стержней винтовыми с возможностью реверсивного вращения, расположенных в вершинах правильного треугольника в пло5 скости несущего бруса, позволяет сократить их число, сохраняя устойчивость и повышая надежность удержания тюка при подъеме, переносе и размещении в новом заданном положении, а также уменьшить материало0 емкость устройства.
Наличие дополнительного автоматического выключателя вращения винтовых стержней при их внедрении в тюк позволяет
5 регулировать и строго ограничивать глубину вхождения стержней, что также повышает надежность удержания, исключая повреждение тюков при наползании их на поперечный брус.
0 Наконец, размещение механизма передачи привода внутри несущего бруса и использование проникающих захватов, свободно входящих и выходящих из тюков, уменьшает габариты устройства и позволя5 ет проводить работы в более стесненных условиях, в частности использовать заявленное устройство в прифермерском оборудовании.
0 Формула изобретения
1. Устройство для захвата, перемещения и укладки формованных волокнистых материалов, содержащее агрегатирован- ный с подъемно-транспортным средство не5 сущий брус, на котором установлены подвижные проникающие элементы с приводом, отличающееся тем, что, с целью повышения надежности захвата, обеспечения плотности укладки тюка в штабель и
0 снижения материалоемкости, проникающие элементы выполнены в виде винтовых стержней, расположенных в вершинах вписанного в плоскость бруса треугольника, внутри которого размещен реверсивный ме5 ханизм передачи вращения проникающих элементов, при этом энергетическая цепь питания привода оснащена автоматическим выключателем, установленным на брусе со стороны проникающих элементов.
2.Устройство поп.1,отличающее- с я тем, что энергетическая цепь и привод выполнены электрическими.
3,Устройство по п.1. о т л и ч а ю щ е е- с я тем, что энергетическая цепь и привод выполнены гидравлическими.
4.Устройство по п.1, о т л и ч а ю щ е е- с я тем, что подъемно-TpaHCriopTHoe средство выполнено в виде кран-балки.
5.Устройство по п.1, отличающее- с я тем, что автоматический выключатель выполнен в виде рычажно-поворотного механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| Стоговоз | 1987 |
|
SU1528370A1 |
| ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2003 |
|
RU2259035C1 |
| Стоговоз | 1981 |
|
SU1029883A1 |
| ХРАНИЛИЩЕ СЕЛЬСКОХОЗЯЙСТВЕННОЙ ПРОДУКЦИИ (ВАРИАНТЫ) И СПОСОБ ЗАГРУЗКИ И ВЫГРУЗКИ ИЗ ХРАНИЛИЩА СЕЛЬСКОХОЗЯЙСТВЕННОЙ ПРОДУКЦИИ | 1997 |
|
RU2143798C1 |
| Тракторная тележка-стоговоз | 1955 |
|
SU102233A1 |
| Стоговоз | 1989 |
|
SU1704684A1 |
| АГРЕГАТ ДЛЯ УБОРКИ СТОГОВ | 1997 |
|
RU2121780C1 |
| Одноосный прицепной тракторный стоговоз | 1960 |
|
SU148988A1 |
| Стоговоз | 1988 |
|
SU1792585A1 |
| Стоговоз | 1978 |
|
SU1256723A1 |
Изобретение относится к области сельскохозяйственного машиностроения, в частностикконструкции подъемно-погрузочных механизмов. Цель изобретения - повышение надежности захвата, обеспечение плотности укладки тюков в штабель без зазора и снижение материалоемкости. Устройство содержит несущий брус 2, проникающие в тюк винтовые элементы и узел агрегатирования с мобильным средством. Привод выполнен с возможностью реверсивного вращения. Винтовые элементы расположены в вершинах равностороннего треугольника, а на брусе между ним и тюком установлен автоматический выключатель, выполненный в виде рычажно- поворотного механизма. При работе устройство устанавливается над тюком, включается привод и рама опускается вниз. Винтовые элементы внедряются в тюк, а выключатель срабатывает при приближении захватываемого тюка к поверхности бруса. Для выгрузки используется реверсивное вращение элементов, что приводит к их выходу из тюка. 4 з.п. ф-лы. 4 ил. w е
Фиг.1
ЯП (CAT fltv/г 1}
Фиг.З
1В
ш
гп
LlJ
/У
Ф/гУ
| Стоговоз | 1960 |
|
SU135305A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
