Изобретение относится к автоматизации в машиностроении и может быть использовано для управления промышленными роботами и манипуляторами при передаче тяжелых предметов.
Известен промышленный робот, который позволяет производить настройку оси сведения схавата с осью предмета, смещенного вправо или влево, с помощью датчика, представляющего собой комбинацию излучателей и приемников световых пучков, пересекающихся под определенными углами. При смещении оси сведения схвата вправо или влево относительно оси предмета происходит перекрытие различных световых пучков, что позволяет определить направле- ние коррекции положения схвата.
Недостатком устройства является использование настройки оси сведения схвата только по одной координате, а также возможность использования его для горячих заготовок, особенно находящихся в печах.
Известно устройство, реализующее способ настройки правильной машины с зажимными головками перед измерением показателей искривленности и скрученности.
Однако устройство, отрабатывающее перемещения по двум координатам (изгиб и кручение заготовки), попеременно позволяет исключить деформирование заготовки при ее зажиме только по одной из координат перед измерением заданного показате- ля (искривленности или скрученности).
Известно устройство для управления манипулятором (промышленным роботом), содержащее привод схвата, приводы продольного и поперечного перемещения с датчиками скорости.
Недостатком известного устройства является возможность смещения цилиндрической заготовки при зажиме ее схватом вследствие несовпадения оси произвольно расположенной заготовки с осью сведения схвата.
VJ
СП Јь
4 Ы
Цель изобретения - повышение надежности устройства за счет исключения смещения заготовки охватом при ее зажиме.
Указанная цель достигается тем, что устройство для управления манипулятором, содержащее привод схвата и по координатам продольного и поперечного перемещения приводы, кинематически связанные с датчиками скорости, дополнительно содержит первый задатчик сигнала, последова- тельно соединенные второй задатчик сигнала, первый переключатель и первый блок управления, а также по координатам продольного и поперечного перемещения первый и второй пороговые элементы, пер- вый ключ, последовательно соединенные задатчик ограниченного момента и второй переключатель и последовательно соединенные логический блок, второй ключ и второй блокуправления, второйитретийвходы которого соединены соответственно с первым и вторым выходами второго переключателя, четвертый вход - с выходом первого ключа, а выход - с входом привода, выход каждого датчика скорости через первый и второй пороговый элемент подключен к первому и второму входу cooTseTCTBYioiMero логического блока, соединенного вторым выходом с первым входом первого ключа, второй выход первого переключателя под- ключей к третьему входу каждого логического блока и второму входу первого блока управления, выходы которого соединены с соответствующими входами привода схвата, а первый и второй выходы первого задат- чика сигнала подключены к второму входу каждого первого и второго ключа соответственно.
Кроме того, логический блок содержит первый элемент И, последовательно соеди- ненные первый формирователь импульса и первый элемент ИЛИ, последовательно подключенные второй элемент И, элемент НЕ, третий элемент И и второй элемент ИЛИ, а также последовательно соединен- ные элемент задержки и второй формиро- ватель импульса, выход которого подключен к второму входу третьего элемента И, первый выход логического блока соединен с выходом первого элемента ИЛИ, второй выход - с выходом второго элемента ИЛИ, первый вход - с первым входом второго элемента И, второй вход - с первым входом первого элемента И, и третий вход - с входом первого формиро- вателя импульса и элемента задержки и вторым входом первого и второго элемента И, выход каждого из которых подключен к второму входу соответственно второго и первого элемента ИЛИ.
Применение описанного устройства позволит повысить надежность управления за счет исключения смещения заготовки схва- том коррекцией положения приводов продольного и поперечного перемещения относительно оси цилиндрической заготовки до полного ее зажима для удержания при транспортировании.
На фиг. 1 представлена схема манипулятора; на фиг. 2 - схема устройства управления манипулятором; на фиг. 3 - схема логического блока; на фиг. 4 - возможные схемы исходного положения схвата и заготовки и направления коррекции положения приводов продольного и поперечного перемещения.
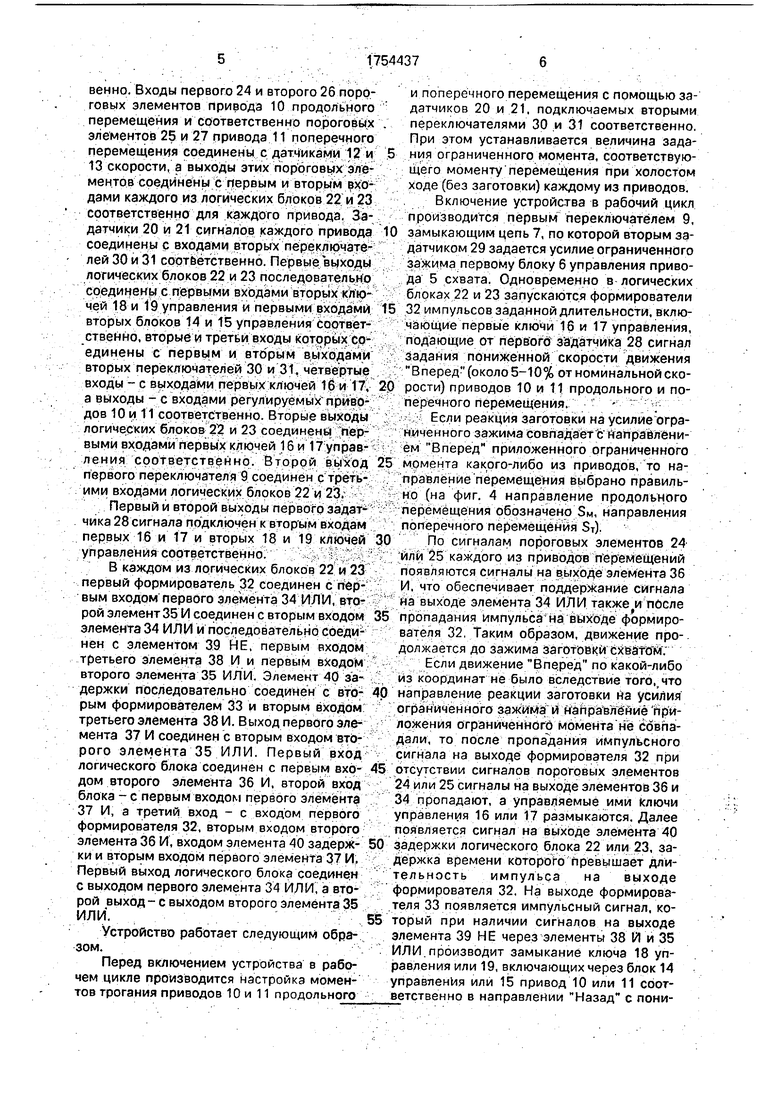
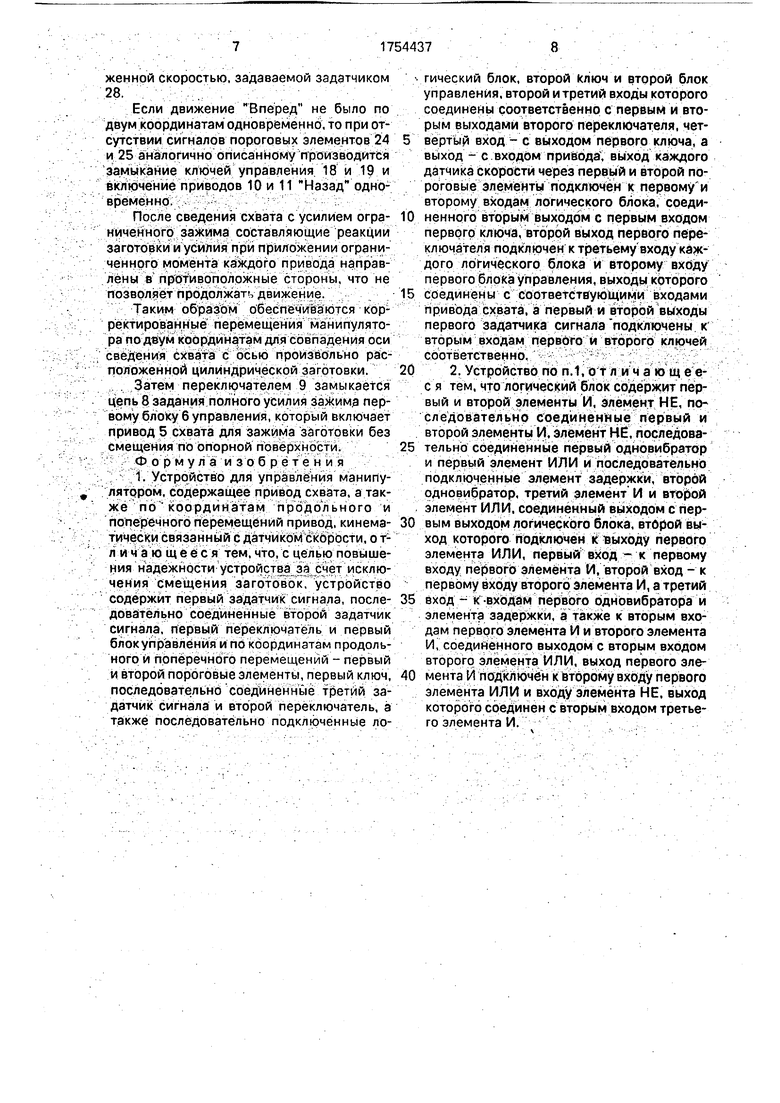
Для зажима заготовки 1 служит схват 2 манипулятора, который имеет механизмы 3 и 4 продольного и поперечного перемещения соответственно, а также привод 5 схвата. Для управления последним служит первый блок б управления с двумя входами, соединенными с цепью 7 задания ограниченного усилия зажима и цепью 8 задания полного усилия зажима заготовки, коммутируемыми первым переключателем 9. Привод 10 продольного перемещения и привод 11 поперечного перемещения кинематически связаны с датчиками 12 и 13 скорости соответственно.
Вторые блоки 14 и 15 управления приводов продольного и поперечного перемещения имеют первые ключи 16 и 17 управления, вторые ключи 18 и 19 управления, а также задатчики 20 и 21 сигналов приводов продольного и поперечного перемещения соответственно. Указанные приводы имеют логические блоки 22 и 23, первые пороговые элементы 24 и 25 и вторые пороговые элементы 26 и 27 соответст- венно. Приводы манипулятора имеют первый задатчик 28 и второй задатчик 29 сигналов управления, а также вторые переключатели 30 и 31 каждого из приводов продольного и поперечного перемещения
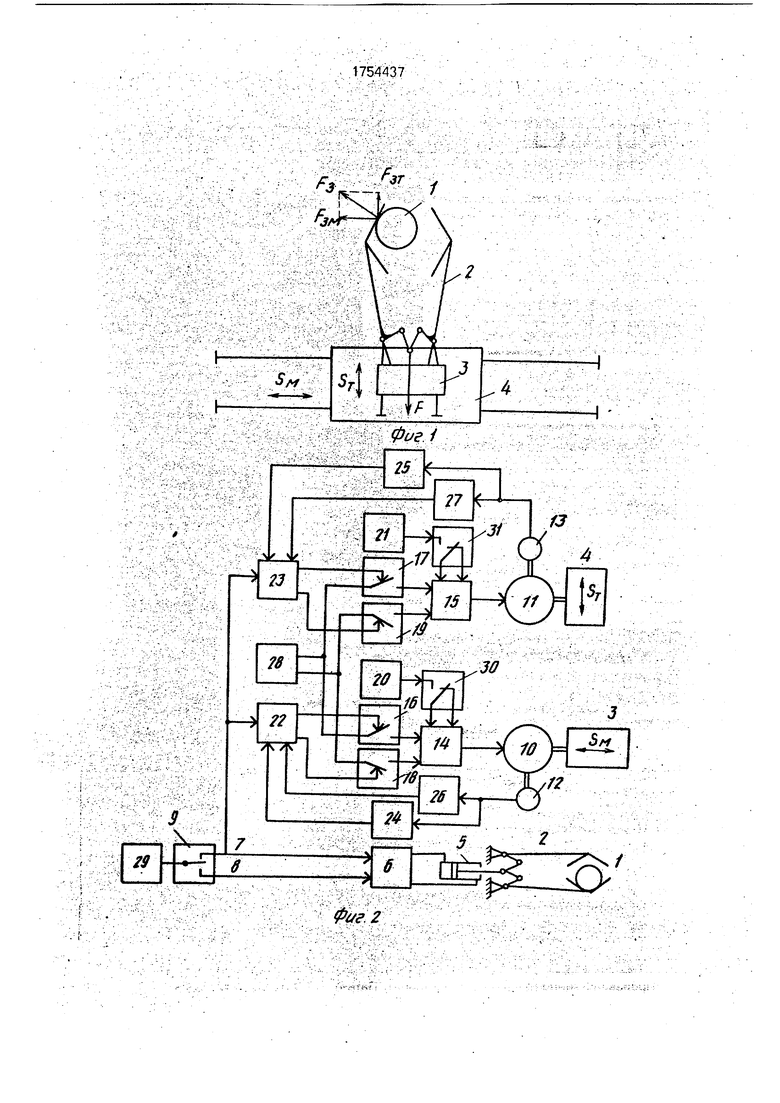
Каждый из логических блоков 22 и 23 имеет три входа и два выхода и состоит из первого и второго формирователей 32 и 33 импульсов, первого и второго логических элементов 34 и 35 ИЛИ. второго,первого и третьего элементов 36, 37 и 38 И соответственно, элемента 39 НЕ и элемента 40 задержки.
Второй задатчик 29 сигнала последовательно соединен с первым переключателем 9, второй и первый выходы которого соединены соответственно с цепями 7 и 8 задания ограниченного и полного усилий зажима, подключенными к второму и первому входам первого блока управления соответственно. Входы первого 24 и второго 26 пороговых элементов привода 10 продольного перемещения и соответственно пороговых элементов 25 и 27 привода 11 поперечного перемещения соединены с датчиками 12 и 13 скорости, а выходы этих пороговых элементов соединены с первым и вторым входами каждого из логических блоков 22 и 23 соответственно для каждого привода. За- датчики 20 и 21 сигналов каждого привода соединены с входами вторых переключателей 30 и 31 соответственно. Первые выходы логических блоков 22 и 23 последовательно соединены с первыми входами вторых ключей 18 и 19 управления и первыми входами вторых блоков 14 и 15 управления соответственно, вторые и третьи входы которых соединены с первым и вторым выходами вторых переключателей 30 и 31. четвертые входы - с выходами первых ключей 16 и 17, а выходы - с входами регулируемых приводов 10 и 11 соответственно. Вторые выходы логических блоков 22 и 23 соединены первыми входами первых ключей 16 и управления соответственно. Второй выход первого переключателя 9 соединен с третьими входами логических блоков 22 и 23.
Первый и второй выходы первого задат чика 28 сигнала подключен к вторым входам первых 16 и 17 и вторых 18 и 19 ключей управления соответственно.
В каждом из логических блоков 22 и 23 первый формирователь 32 соединен с первым входом первого элемента 34 ИЛИ, второй элемент 35 И соединен с вторым входом элемента 34 ИЛИ и последовательно соединен с элементом 39 НЕ, первым входом третьего элемента 38 И и первым входом второго элемента 35 ИЛИ. Элемент 40 задержки последовательно соединен с вторым формирователем 33 и вторым входом третьего элемента 38 И. Выход первого элемента 37 И соединен с вторым входом второго элемента 35 ИЛИ. Первый вход логического блока соединен с первым входом второго элемента 36 И, второй вход блока - с первым входом первого элемента 37 И, а третий вход - с входом первого формирователя 32, вторым входом второго элемента 36 И, входом элемента 40 задержки и вторым входом первого элемента 37 И. Первый выход логического блока соединен с выходом первого элемента 34 ИЛИ, а второй выход- с выходом второго элемента 35 ИЛИ.
Устройство работает следующим образом.
Перед включением устройства в рабочем цикле производится настройка моментов трогания приводов 10 и 11 продольного
и поперечного перемещения с помощью за- датчиков 20 и 21, подключаемых вторыми переключателями 30 и 31 соответственно. При этом устанавливается величина зада- 5 ния ограниченного момента, соответствующего моменту перемещения при холостом ходе (без заготовки) каждому из приводов. Включение устройства в рабочий цикл производится первым переключателем 9, 10 замыкающим цепь 7, по которой вторым за- датчиком 29 задается усилие ограниченного зажима первому блоку б управления привода 5 схвата. Одновременно в логических блоках 22 и 23 запускаются формирователи 15 32 импульсов заданной длительности, включающие первые ключи 16 и 17 управления, подающие от первого зэдатчика 28 сигнал задания пониженной скорости движения Вперед (около 5-10% от номинальной ско- 20 рости) приводов 10 и 11 продольного и поперечного перемещения.
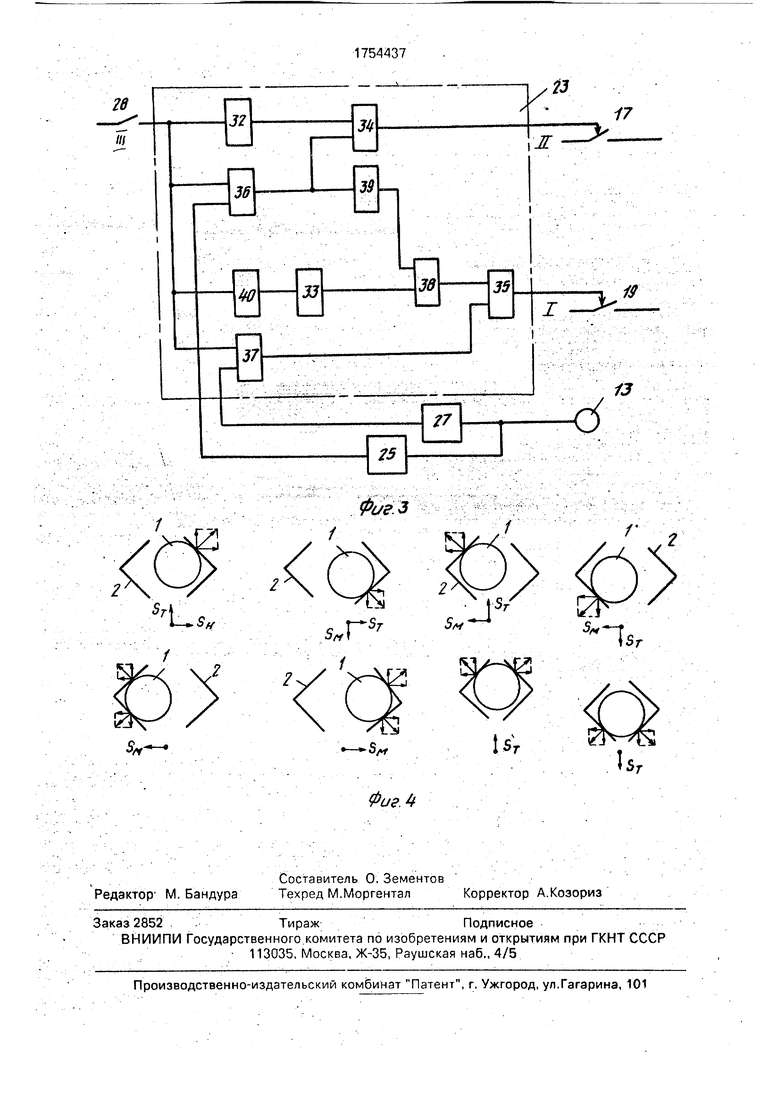
Если реакция заготовки на усилие ограниченного зажима совпадает с направлением Вперед приложенного ограниченного 5 момента какого-либо из приводов, то направление перемещения выбрано правильно (на фиг. 4 направление продольного перемещения обозначено 5м, направления поперечного перемещения ST). 0 По сигналам пороговых элементов 24 или 25 каждого из приводов перемещений появляются сигналы на выходе элемента 36 И, что обеспечивает поддержание сигнала на выходе элемента 34 ИЛИ также и после 5 пропадания импульса на выходе формирователя 32, Таким образом, движение продолжается до зажима заготовки схвато м.
Если движение Вперед по какой-либо из координат не было вследствие 0 направление реакции заготовки на усилия ограниченного зажима и направление приложения ограниченного момента не совпадали, то после пропадания импульсного сигнала на выходе формирователя 32 при 5 отсутствии сигналов пороговых элементов 24 или 25 сигналы на выходе элементов 36 и 34 пропадают, а управляемые ими ключи управления 16 или 17 размыкаются. Далее появляется сигнал на выходе элемента 40 0 задержки логического блока 22 или 23, задержка времени которого превышает длительность импульса на выходе формирователя 32, На выходе формирователя 33 появляется импульсный сигнал, ко- 5 торый при наличии сигналов на выходе элемента 39 НЕ через элементы 38 И и 35 ИЛИ производит замыкание ключа 18 управления или 19, включающих через блок 14 управления или 15 привод 10 или 11 соответственно в направлении Назад с пониженной скоростью, задаваемой задатчиком 28.
Если движение Вперед не было по двум координатам одновременно, то при отсутствии сигналов пороговых элементов 24 и 25 аналогично описанному производится замыкание ключей управления 18 и 19 и включение приводов 10 и 11 Назад одновременно.
После сведения схвата с усилием ограниченного зажима составляющие реакции заготовки и усилия при приложении ограниченного момента каждого привода направлены в противоположные стороны, что не позволяет продолжать движение.
Таким образом обеспечиваются корректированные перемещения манипулятора по двум координатам для совпадения оси сведения схвата с осью произвольно расположенной цилиндрической заготовки.
Затем переключателем 9 замыкается цепь 8 задания полного усилия зажима первому блоку 6 управления, который включает привод 5 схвата для зажима заготовки без смещения по опорной поверхности.
Формула изобретения
1. Устройство для управления манипу- лятором, содержащее привод схвата, а также по координатам продольного и поперечного перемещений привод, кинематически связанный с датчиком скорости, о т- личающееся тем, что, с целью повышения надежности устройства за счет исключения смещения заготовок, устройство содержит первый задатчик сигнала, последовательно соединенные второй задатчик сигнала, первый переключатель и первый блок управления и по координатам продольного и поперечного перемещений - первый и второй пороговые элементы, первый ключ, последовательно соединенные третий задатчик сигнала и второй переключатель, а также последовательно подключенные ло гический блок, второй Ключ и второй блок управления, второй и третий входы которого соединены соответственно с первым и вторым выходами второго переключателя, четвертый вход - с выходом первого ключа, а выход - с входом привода, выход каждого датчика скорости через первый и второй пороговые элементы подключен к первому и второму входам логического блока, соединенного вторым выходом с первым входом первого ключа, второй выход первого переключателя подключен к третьему входу каждого логического блока и второму входу первого блока управления, выходы которого
соединены с соответствующими входами привода схвата, а первый и второй выходы первого задатчика сигнала подключены к вторым входам первого и второго ключей соответственно.
2. Устройство по п.1,о т л ичающее- с я тем, что логический блок содержит первый и второй элементы И, элемент НЕ, последовательно соединенные первый и второй элементы И, элемент НЕ, последовательно соединенные первый одновибратор и первый элемент ИЛИ и последовательно подключенные элемент задержки, второй одновибратор, третий элемент И и второй элемент ИЛИ. соединенный выходом с первым выходом логического блока, второй выход которого подключен к выходу первого элемента ИЛИ, первый вход - к первому входу первого элемента И, второй вход - к первому входу второго элемента И, а третий
вход - к -входам первого одновибратора и элемента задержки, а также к вторым входам первого элемента И и второго элемента И, соединенного выходом с вторым входом второго элемента ИЛИ, выход первого элемента И подключен к второму входу первого элемента ИЛИ и входу элемента НЕ, выход которого соединен с вторым входом третьего элемента И.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления схватом манипулятора | 1985 |
|
SU1337250A1 |
| Устройство для визуализации рабочей зоны робота | 1979 |
|
SU855608A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПЕРЕДВИЖЕНИЯ ЩИТА И ВОЗВЕДЕНИЯ КРЕПИ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА | 2001 |
|
RU2206751C1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2015 |
|
RU2604555C1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 2015 |
|
RU2615940C1 |
| Устройство для управления манипулятором | 1985 |
|
SU1262450A1 |
| Устройство для управления ковочным комплексом | 1989 |
|
SU1685751A1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ И ЛИНЕЙНО ПЕРЕМЕЩАЕМЫМ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ОСНОВАНИЕМ | 2022 |
|
RU2794082C1 |
| Устройство для управления многозвенным манипулятором | 1985 |
|
SU1257613A1 |
| Устройство для управления схватом манипулятора | 1984 |
|
SU1193635A1 |
Использование: в, робототехнике. Сущность изобретения: устройство содержит первый задатчик сигнала, второй задатчик сигнала, переШ8ч аҐеЖ; блок управления, привод схвата, а также по коордиигатам про- долъного и поперечного перемещения - логический блок, задатчик сигнала, блок управления, два пороговы.х элемента, пере- ключатель, два ключа, датчик скорости и привод. 1 з.п. ф-лы. 4 ил.
Фиг 2
28
-
///
32
п
/
/
23
17
Ж
35
I
13
27
13
Фие.З
ЭАГ
tsV
| Белянин П.Н | |||
| Промышленные роботы, М.: Машиностроение | |||
| Сплав для отливки колец для сальниковых набивок | 1922 |
|
SU1975A1 |
| Аппарат для радиометрической съемки | 1922 |
|
SU124A1 |
