Изобретение относится к робототехнике и может быть использовано при создании универсальных манипуляторов, предназначенных для механизации и автоматизации производст венных процессов, а также проведения исследовательских- работ в опасных для человека зонах, требую щих ограничения развиваемых в схва те исполнительного органа усилий. Целью изобретения является расширение функциональных возможносте устройства за счет обеспечения заданного усилия зажима объекта. На чертеже представлена функциональная схема устройства. Устройство содержит источник 1 п 1тания, реверсивный пускатель 2, задатчик 3 сигналов, элемент ИЛИ 4 первый злемент 5 памяти, злемент Н 6, триггер 7, датчик 8тока, ограничитель 9, первый, второй и трети коммутаторы 10-12 соответственно, двигатель 13, необратимый редуктор 14, механизм 15 схвата, второй элемент 16 памяти, пороговый элемент 17, блок 18 уставок, вьшрямитель 19. Устройство работает следующим образом. Нейтральное положение задатчика 3 сигналов в исходном состоянии соответствует нулевому сигналу на выходе элемента ИЛИ 4 и триггера 7 так как на вход последнего поступает сигнал логической единицы с выхода элемента НЕ 6. Выход ограничителя 9 приэтом через коммутаторы 10-12 соединен с двигателем Появление на одном из выходов задатчика 3, управляемого оператором j сигнала Зажим вызывает сра батывание реверсивного пускателя 2 и изменение сигнала на выходе элемента ИЛИ 4, что приводит к срабатыванию первого элемента 5 памяти (реле времени) и снятию сигнала логической единицы с входа триггера 7. Сигнал с выхода первог элемента 5 осуществляет пер1еключение первого коммутатора 10 так, что напряжение с источника 1 питания через реверсивный пускатель 2 минуя датчик 8 тока и ограничитель 9, поступает через коммутаторы ,10-12 на двигатель 13, производя пуск последнего. По истечении времени, необходимого для трогания 35 и разгона двигателя 13, происходит отключение первого элемента 5 и возвращение первого коммутатора 10 в исходное положение, при котором питающее напряжение с выхода реверсивного пускателя 2 начинает поступать на двигатель 13 через датчик 8 тока и ограничитель 9. Последний уменьшает ток потребления двигателя 13 до величины, обеспечивающей движение механизма 15 схвата в направлении зажима с такой скоростью, при которой возможно эффективное торможение двигателя 13 до достижения на механизме схвата 15 максимально допустимого усилия. После касания губками схвата механизма 15 объекта манипулирования начинает расти момент на валу двигателя 13, что приводит к увеличению потребляемого тока и срабатьгоанию порогово го элемента 17. Сигнал логической единицы с выхода порогового элемента 17 поступает на вход триггера, вызывая его опрокидывание. Изменение сигнала на выходе триггера 7 вызывает срабатьтание второго злемента 16 памяти и одновременное переключение второго 11 и третьего. 12 коммутаторов. Последний подключает к входу двигателя 13 постоянное напряжение с выхода выпрямителя 19. Происходит динамическое торможение двигателя 13. По истечении времени торможения отключается элемент 16 и третий коммутатор 12 возвращается в исходное положение. При этом через второй коммутатор 11 на вход двигателя 13 подается питающее напряжение с выхода реверсивного пускателя 2 через блок 18 уставок. Происходит дожим с усилием, соответствующим величине токоограничения блока 18 уставок. Величину уставки, определяющую наибольшее усилие сжатия губок схвата механизма 15, устанавливает оператор на основании априорной информации о прочностных свойствах объекта манипулирования. При отключении оператором задатчика 3 исчезает сигнал Зажим на его выходе, двигатель 13 обесточивается, а изменение сигнала на выходе элемента ИЛИ 4 приводит к возвращению триггера 7 в нулевое р тояние. Заяа произведен. 3 Алгоритм работы устройства в режиме разжима аналогичен описанному с той разницей, что с выхода 1193635 задатчика 3 подается сигнал Разжим а вращение двигателя 13 происходит в противоположном направлении.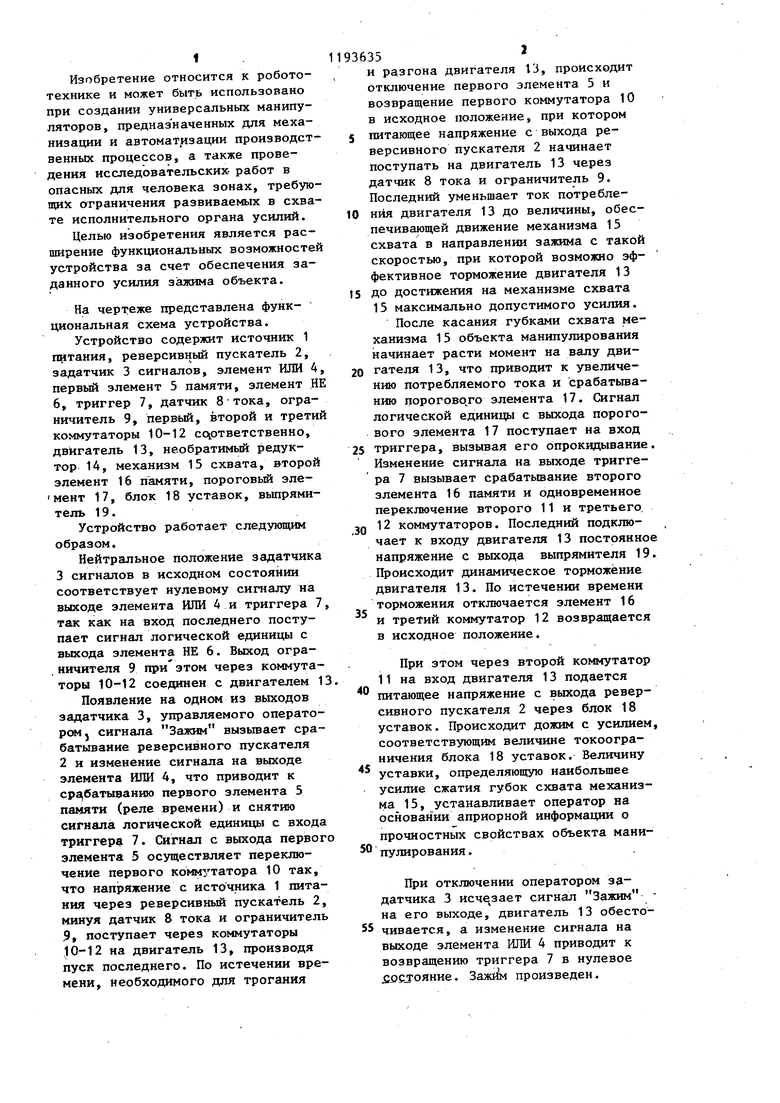
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления мощностью турбины | 1984 |
|
SU1227823A1 |
| Устройство для остановки поднимаемой бурильной колонны | 1986 |
|
SU1332003A1 |
| Устройство для измерения механических параметров коммутирующих элементов | 1984 |
|
SU1215094A1 |
| Электропривод | 1989 |
|
SU1697236A1 |
| Устройство для штабелирования и разборки штабеля листовых изделий | 1988 |
|
SU1708724A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Устройство для программного управления технологическим оборудованием | 1987 |
|
SU1423982A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ СУДОВОЙ ЛЕБЕДКИ | 1994 |
|
RU2074501C1 |
| Устройство для адресования транспортного средства | 1987 |
|
SU1618706A1 |
| Устройство для защиты электропривода глубинного штангового насоса от анормального режима | 1987 |
|
SU1457053A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СХВАТОМ МАНИПУЛЯТОРА, содержащее последовательно соединенные источник питания, реверсивный пускатель и датчик тока, а также двигатель, связанный через необратимый редуктор с механизмом схвата и задатчи сигналов, первый и второй выходы которого подключены к второму и третьему входам реверсивного пускателя соответственно, отлича щееся тем, что, с целью расши рения функциональных возможностей устройства за счет обеспечения зад ного усилия зажима объекта, устрой ство содержит пороговый элемент. блок уставок, выпрямитель, первый элемент памяти и последовательно соединенные ограничитель, первый, второй и третий коммутаторы, а также последовательно подключенные элемент ИЛИ, элемент НЕ, триггер и второй элемент памяти, выход которого соединен с вторым входом третьего коммутатора, лодключенного выходом к входу двигателя, а третьим входом через вьтрямитель - к выходу источника питания, выход реверсивного пускателя соединен непосредственно с вторым входом первого коммутатора и через блок уставок - с вторым входом второго коммутатора, третий вход которого подключен к выходу триггера, соединенного вторым входом через пороговый элемент с выходом датчика тока, выходы эадатчика сигналов подключены к входам элемента ИЛИ, выход которого через первый элемент памяти соединен с третьим входом первого коммутатора.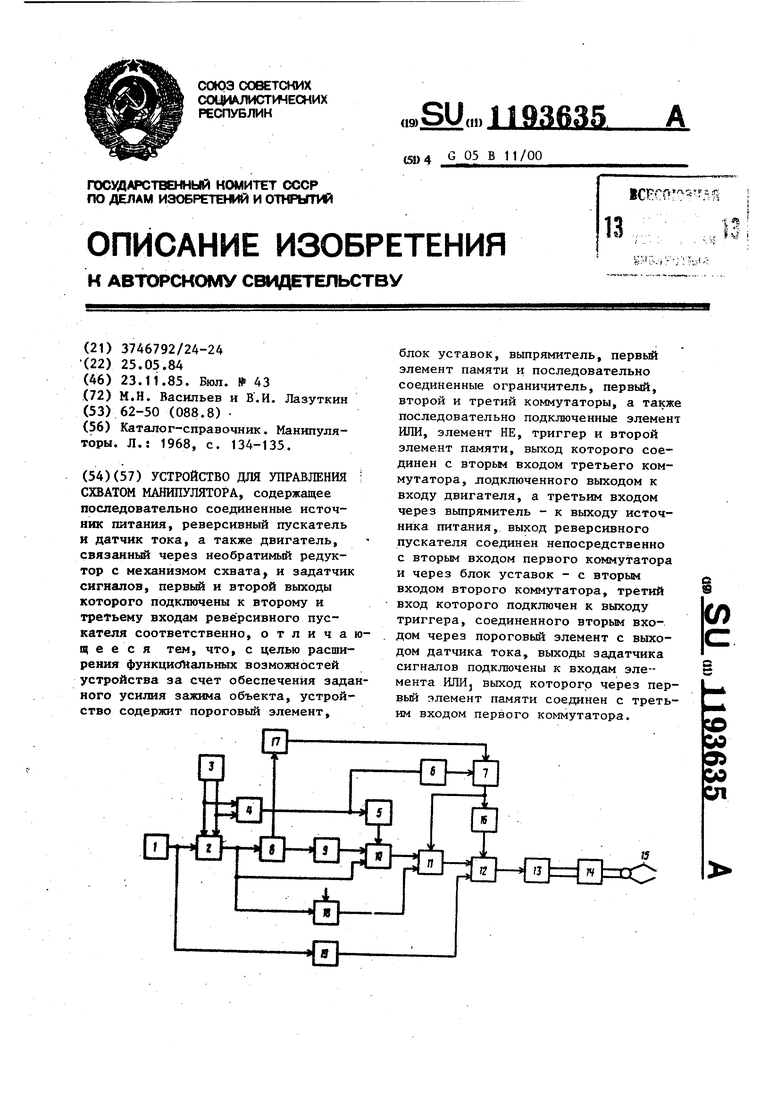
| Каталог-справочник | |||
| Манипуляторы | |||
| Л | |||
| Приспособление для контроля движения | 1921 |
|
SU1968A1 |
| Халат для профессиональных целей | 1918 |
|
SU134A1 |
