Фигл
Изобретение относится к системам автоматического управления штабелерами, расположенными на одном рельсовом пути и перемещающимися навстречу друг другу.
Известна система совместного управ- ления штабелерами, содержащая программный блок, соединенный с входами блока определения вектора скорости, другие входы которого связаны с датчиками положения штабелера, а выходы - с блоком управления приводом, и блок согласования, состоящий из сумматоров, подключенных к их выходам одними входами узлов сравнения, другие входы которых через шифратор подключены к датчикам положения, и под- ключенного к выходам узлов сравнения одними входами узла формирования сигналов управления штабелерами, другие входы которого соединены к программным блокам, а третьи - к блокам определения скорости, при этом каждое из устройств управления перемещением штабелера снабжено шифратором, через который датчики положения штабелера связаны с другими входами блоков определения вектора скорости, третьи входы которого подключены к другим выходам Влоков управления приводом, третьим входы которых соединены с входами сброса программного блока.
Недостатком этой системы является большое число датчиков положения штабелера, получающих информацию от адресных элементов в двоичном коде, вследствие чего блок датчиков горизонтального перемещения, насчитывающий до семи кодовых датчиков, плюч два датчика точной остановки и плюс синхронизирующий датчик, очень громоздкий, особенно для небольших шта- белеров. Система обработки информации с датчиков, включающая блок согласования, шифраторы, узлы формирования сигналов управлений, слишком усложнена из-за системы съема информации о поЙШкёими штабелера, что снижает надежность сиЈте мы.
Поскольку съем информации о положе- ним происходит пЬС-Рбянно, Тб а др ёсные элементы (шунты) установлены непрерывно по всему пути и на каждый датчик, а это значит, что идет большой расход металлической полосы. Кроме того, определение теку- щего положения штабелеров задается максимальной величиной числа ячеек, равной двум тбрмозным путям, допустимому расстоянию между штабалерами, При этом не учитывается загруженность и величина пробега штабелеров, от которых зависит тормозной путь, что не позволяет максимально сблизить штабелеры при их сближении во избежании их столкновения, поэтому допустимое расстояние сближения штабе
леров довольно велико (не учитывается момент инерции).
Цель изобретения - обеспечение выбора штабелерами оптимального начала торможения по их динамическим характеристикам , упрощение системы управления и повышение надежности ее работы .
Указанная цель достигается тем , что в системе совместного управления штабелерами , перемещающимися по одному пути , содержащей для каждого штабелера блок задания адреса и отработки программы , узел сравнения и общее для обоих штабелеров устройство управления , блок задания и отработки программы подключен к блоку формирования счетного импульса и точного останова , соединенного с импульсными датчиками , к блоку счета и записи адреса , узлу сравнения , причем блок формирования счетного импульса и точного останова соединен с блоком счета и записи адреса обратной связью с узлом сравнения , с которым блок счета и записи адреса соединен прямой и обратной связью ,
Устройство управления содержит четыре сумматора, два компаратора и один селектор, причем два сумматора подключены к блоку задания адреса и отработки программы первого штабелера, один из них через третий сумматор управляет от блока счета и записи адреса, четвертый сумматор подключен к блоку задания адреса и отработки программы второго штабелера и к блоку счета и записи адреса.
Первые два сумматора подключены к компараторам, соединенным с селектором, причем первый компаратор имеет связь с блоком задания адреса и отработки программы второго штабалера.
Селектор шестью выходами подключен к аппаратам управления приводами перемещения и захватов обоих штабелеров, в блоках задания адреса и отработки программы штабелеров, а входами подключен к компаратору канала адреса, компаратору канала положения, блокам формирования счетного импульса и точного останова обоих штабелеров, узлам сравнения, блокам задания адреса и отработки программы обоих штабелеров.
Устройство блока формирования счетного импульса и точного останова в принципе отличается от известного блока за счет использования новой формы представления информации счета пройденных ячеек Кроме того, он совмещает функцию точного останова и операцию формирования счетного импульса для счета пройденных ячеек что очень удобно И уменьшает число соединений между блоками, отличается также установкой датчиков на разных уровнях.
В прототипе счет осуществляется кодовыми датчиками и снимается непосредственно с их выходов, а в предлагаемом устройстве информация формируется в блоке счета и аписи адреса, после чего выдается в схему управления информации, а следовательно, уменьшается возможность возникновения ошибки,
Отличие числа выходов компараторов в предлагаемой системе по сравнению с известной объясняется различием метода анализа состояния штабелеров и контроля за их движением. Так, с выходов компаратора 12 снимаются три сигнала, определяющие соответственно беспрепятственное перемещение штабелеров при наличии сигнала А, включение системы синхронизации движения (при сигнале А) обоих штабелеров в одном направлении, пока не остановится ведущий штабелер, т.е. по сигналу А, и, наконец, возможность автоматического включения системы анализа направления движения штабелеров или их готовности к передвижению при наличии сигнала А.
Таким образом, состояние штабалеров находится под постоянным контролем за счет наличия третьего дополнительного сигнала. Поэтому, если хотя бы один сигнал отсутствует, это сигнализирует об аварийном состоянии и вызывает аварийную остановку, что немаловажно для создания надежности системы управления для исключения аварийного столкновения штабелеров.
Такие электронные устройства, как сумматор, компаратор применяются всюду е устройствах автоматики и давно известны, но в данной заявке они представляют совершенно иную совокупность формирования команд управления совместной работой штабалеров, при которой сближение штабелеров допускается не только по условному числу ячеек, но и динамическими данным каждого штабелера, зависящими от веса перевозимого груза и пути пробега с данным грузом.
Новизна селектора заключается в том, что он является полностью законченным устройством, производящим селекционный анализ состояния обоих штабелеров на основе поступающих информационных сигналов и вырабатывающим на соновании этих данных сигналов управления механизмами обоих штабелеров, в то время как узел 12 в прототипе только формирует сигналы управления.
Наличие равного числа выходов селектора с узлом 12 в прототипе объясняется
тем, что каждый штабелер имеет три управляемых реверсивных привода, поэтому для любой заявки число выходных сигналов будет шесть.
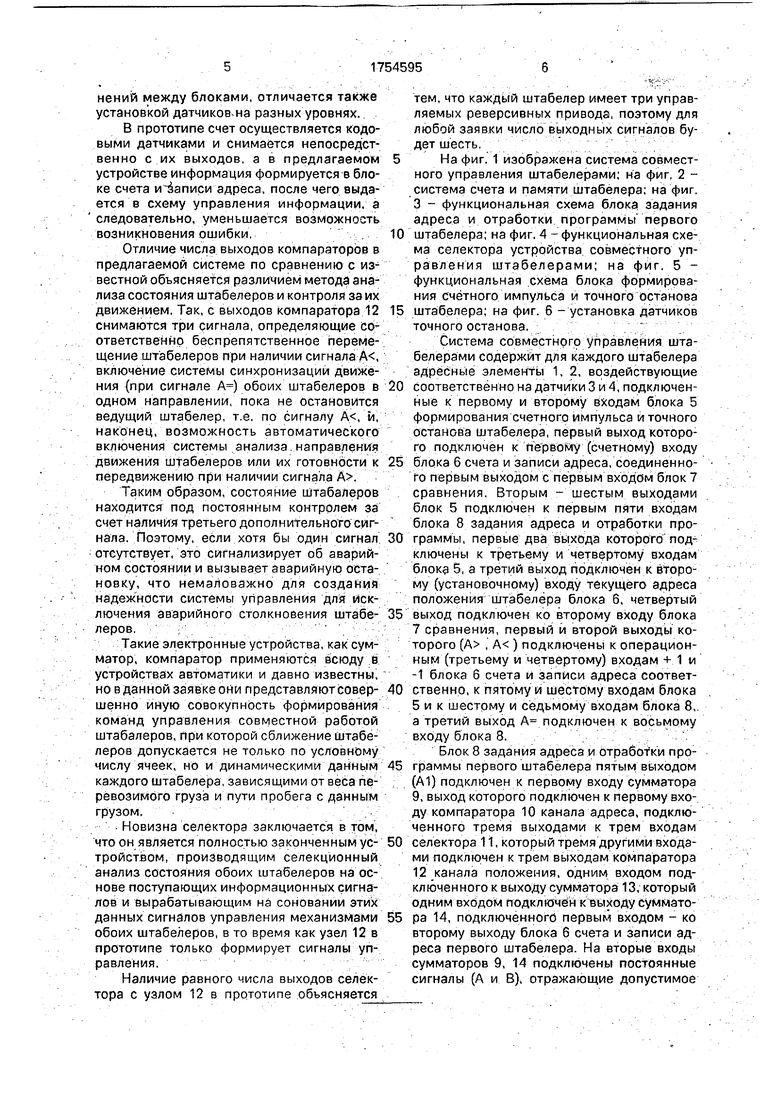
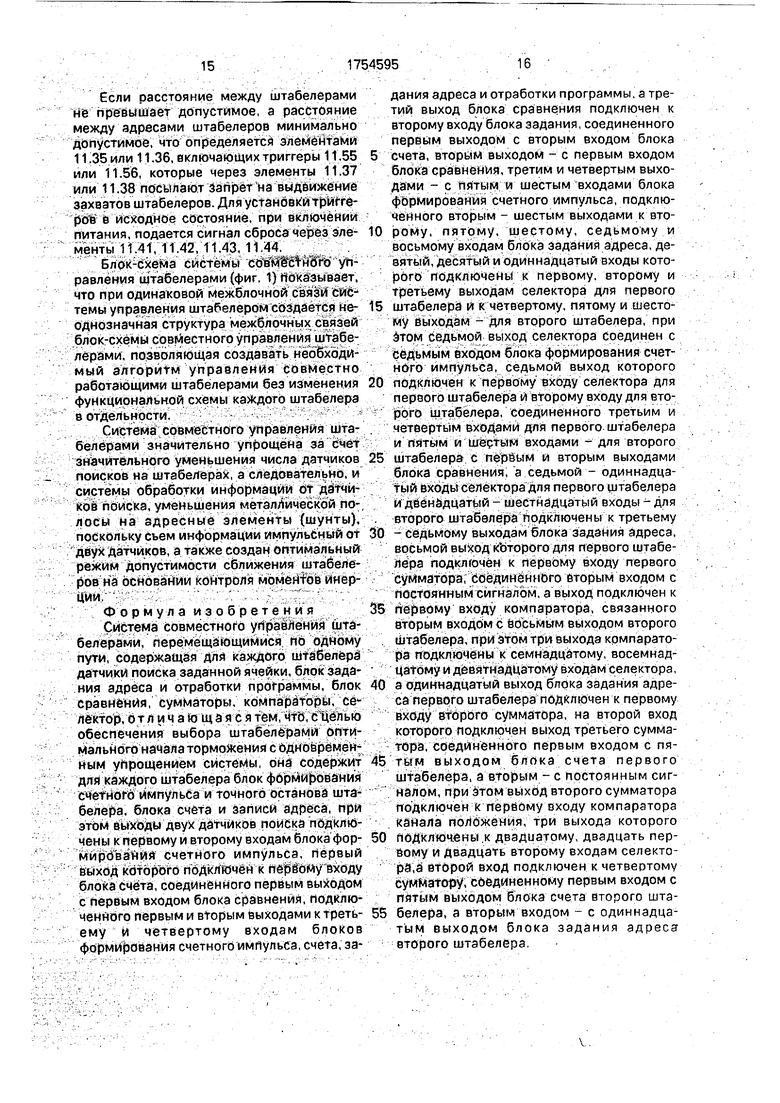
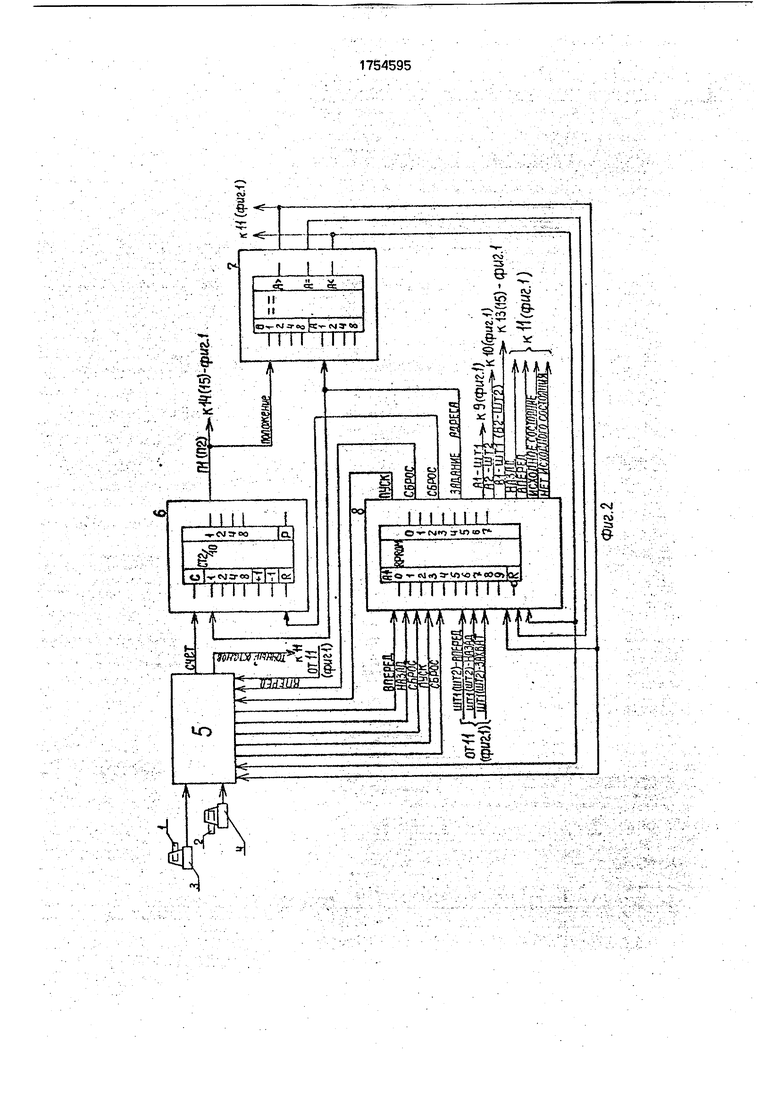
На фиг. 1 изображена система совместного управления штабелерами; на фиг. 2 - система счета и памяти штабелера; на фиг. 3 - функциональная схема блока задания адреса и отработки программы первого
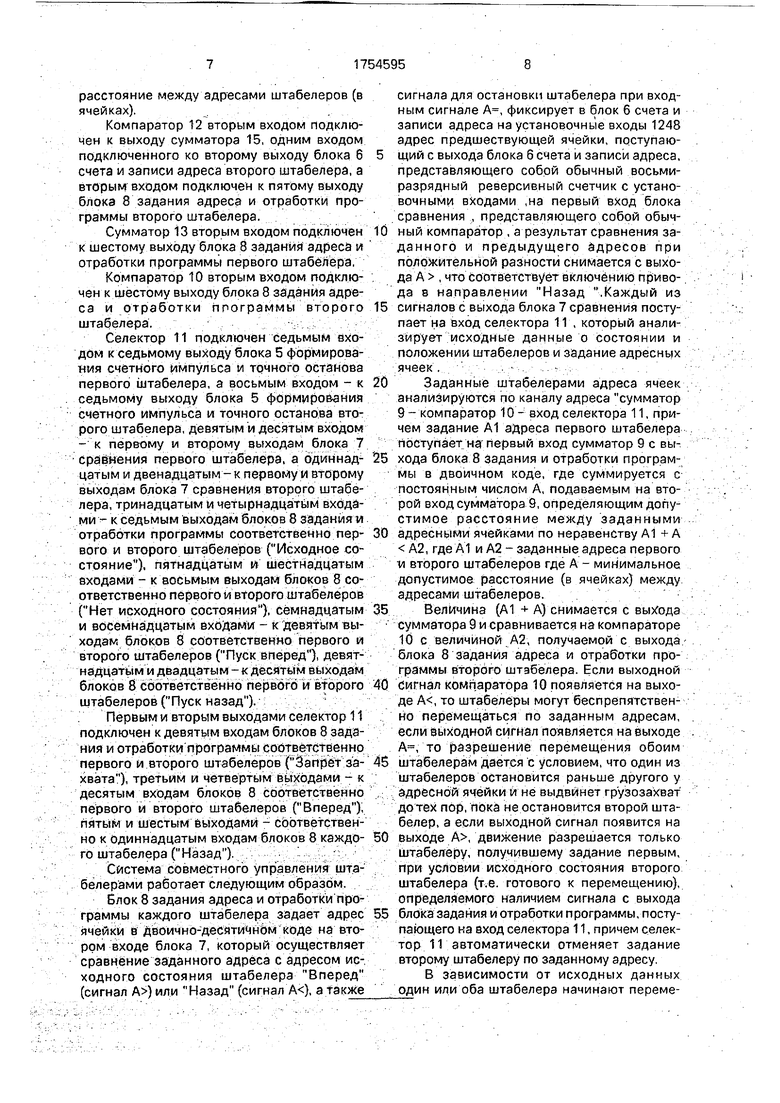
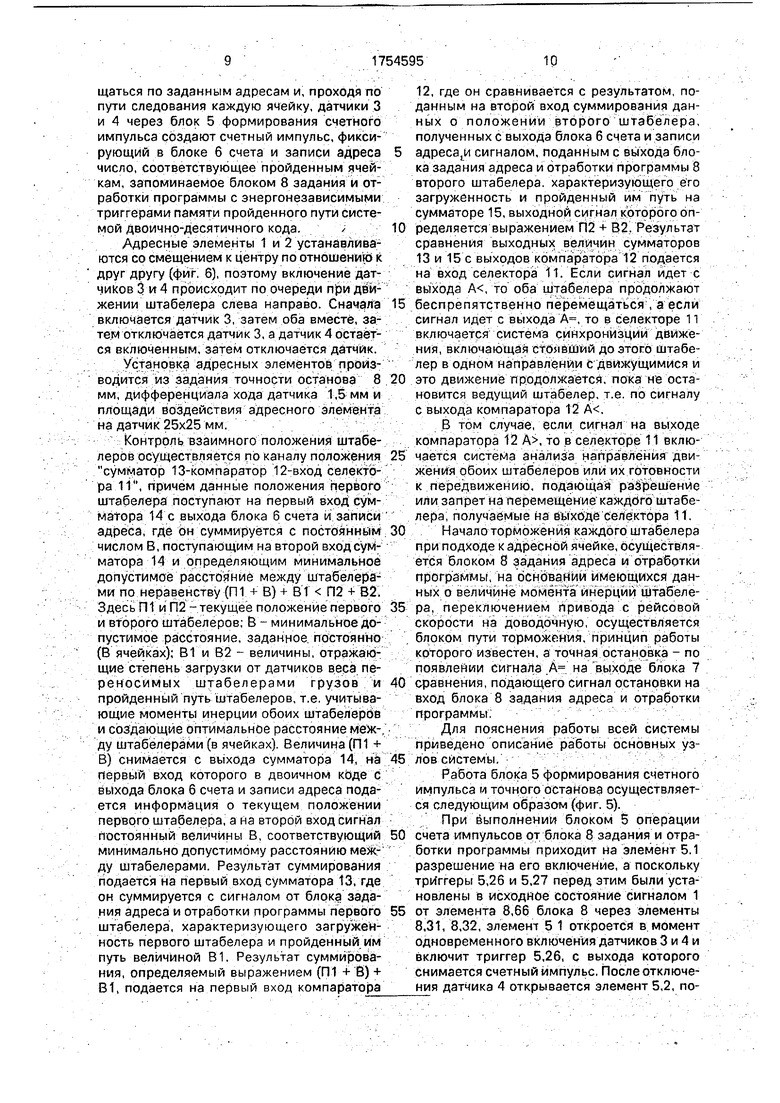
штабелера; на фиг. 4 - функциональная схема селектора устройства совместного управления штабелерами; на фиг. 5 - функциональная схема блока формирования счетного импульса и точного останова
штабелера; на фиг. 6 - установка датчиков точного останова.
Система совместного управления штабелерами содержит для каждого штабелера адресные элементы 1, 2, воздействующие
соответственно на датчики 3 и 4, подключенные к первому и второму входам блока 5 формирования счетного импульса и точного останова штабелера, первый выход которого подключен к первому (счетному) входу
блока 6 счета и записи адреса, соединенного первым выходом с первым входом блок 7 сравнения. Вторым - шестым выходами блок 5 подключен к первым пяти входам блока 8 задания адреса и отработки программы, первые два выхода которого подключены к третьему и четвертому входам блока 5, а третий выход подключен к второму (установочному) входу текущего адреса положения штабелера блока б, четвертый
выход подключен ко второму входу блока 7 сравнения, первый и второй выходы которого (А , А ) подключены к операционным (третьему и четвертому) входам + 1 и -1 блока 6 счета и записи адреса соответственно, к пятому и шестому входам блока 5 и к шестому и седьмому входам блока 8, а третий выход А подключен к восьмому входу блока 8.
Блок 8 задания адреса и отработки программы первого штабелера пятым выходом (А1) подключен к первому входу сумматора 9, выход которого подключен к первому входу компаратора 10 канала адреса, подключенного тремя выходами к трем входам
селектора 11, который тремя другими входами подключен к трем выходам компаратора 12 канала положения, одним входом подключенного к выходу сумматора 13, который одним входом подключен къыходу сумматора 14, подключенного первым входом - ко второму выходу блока 6 счета и записи адреса первого штабелера. На вторые входы сумматоров 9, 14 подключены постоянные сигналы (А и В), отражающие допустимое
расстояние между адресами штабелеров (в ячейках).
Компаратор 12 вторым входом подключен к выходу сумматора 15, одним входом подключенного ко второму выходу блока б счета и записи адреса второго штабелера, а вторым входом подключен к пятому выходу блока 8 задания адреса и отработки программы второго штабелера.
Сумматор 13 вторым входом подключен к шестому выходу блока 8 задания адреса и отработки программы первого штабелера,
Компаратор 10 вторым входом подключен к шестому выходу блока 8 задания адреса и отработки программы второго штабелера.
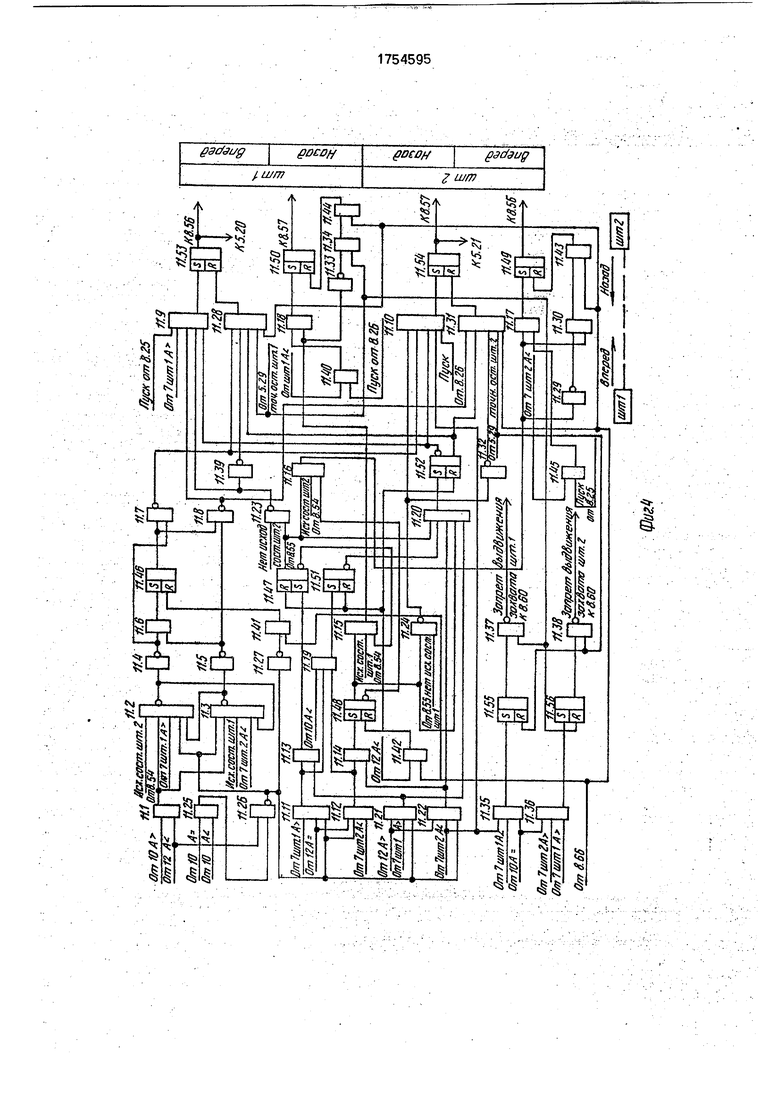
Селектор 11 подключен седьмым входом к седьмому выходу блока 5 формирования счетного импульса и точного останова первого штабелера, а восьмым входом - к седьмому выходу блока 5 формирования счетного импульса и точного останова второго штабелера, девятым и десятым входом - к первому и второму выходам блока 7 сравнения первого штабелера, а одиннадцатым и двенадцатым - к первому и второму выходам блока 7 сравнения второго штабелера, тринадцатым и четырнадцатым входами - к седьмым выходам блоков 8 заданиям отработки программы соответственно первого и второго штабелеров (Исходное состояние), пятнадцатым w шестнадцатым входами - к восьмым выходам блоков 8 соответственно первого и второго штабелеров (Нет исходного состояния), семнадцатым и восемнадцатым входами - к девятым выходам блоков 8 соответственно первого и второго штабелеров (Пуск вперед), девятнадцатым и двадцатым - к десятым выходам блоков 8 соответственно первого и второго штабелеров (Пуск назад).
Первым и вторым выходами селектор 11 подключен к девятым входам блоков 8 задания и отработки программы соответственно первого и второго штабелеров (Запрет захвата), третьим и четвертым выходами - к десятым входам блоков 8 соответственно первого и второго штабелеров (Вперед), пятым и шестым выходами - соответственно к одиннадцатым входам блоков 8 каждого штабелера (Назад).
Система совместного управления шта- белерами работает следующим образом.
Блок 8 задания адреса и отработки программы каждого штабелера задает адрес ячейки в двоично-десятичном коде на втором входе блока 7, который осуществляет сравнение заданного адреса с адресом исходного состояния штабелера Вперед (сигнал А) или Назад (сигнал А), а также
сигнала для остановки штабелера при входным сигнале А, фиксирует в блок 6 счета и записи адреса на установочные входы 1248 адрес предшествующей ячейки, поступающий с выхода блока б счета и записи адреса, представляющего собой обычный восьмиразрядный реверсивный счетчик с установочными входами ,на первый вход блока сравнения , представляющего собой обыч0 ный компаратор , а результат сравнения за- данного и предыдущего адресов при положительной разности снимается с выхода А , что соответствует включению привода в направлении Назад .Каждый из
5 сигналов с выхода блока 7 сравнения поступает на вход селектора 11 , который анализирует исходные данные о состоянии и положении штабелеров и задание адресных ячеек .
0 Заданные штабелерами адреса ячеек анализируются по каналу адреса сумматор
9- компаратор 10 - вход селектора 11, причем задание А1 адреса первого штабелера поступает на первый вход сумматор 9 с вы5 хода блока 8 задания и отработки программы в двоичном коде, где суммируется с постоянным числом А, подаваемым на второй вход сумматора 9, определяющим допустимое расстояние между заданными
0 адресными ячейками по неравенству А1 + А А2, где А1 и А2 - заданные адреса первого VI второго штабелеров где А - минимальное допустимое расстояние (в ячейках) между адресами штабелеров.
5 Величина (А1 + А) снимается с выхода сумматора 9 и сравнивается на компараторе
10с величиной А2, получаемой с выхода блока 8 задания адреса и отработки программы второго штзбелера. Если выходной
0 Сигнал компаратора 10 появляется на выходе А, то штабелеры могут беспрепятственно перемещаться по заданным адресам, если выходной сигнал появляется на выходе А, то разрешение перемещения обоим
5 штабелерам дается с условием, что один из штабелеров остановится раньше другого у адресной ячейки и не выдвинет грузозахват до тех пор, пока не остановится второй шта- белер, а если выходной сигнал появится на
0 выходе А, движение разрешается только штабелеру, получившему задание первым, при условии исходного состояния второго штабелера (т.е. готового к перемещению), определяемого наличием сигнала с выхода
5 блока задания и отработки программы, поступающего на вход селектора 11, причем селектор 11 автоматически отменяет задание второму штабелеру по заданному адресу
В зависимости от исходных данных один или оба штабелера начинают перемещаться по заданным адресам и, проходя по пути следования каждую ячейку, датчики 3 и 4 через блок 5 формирования счетного импульса создают счетный импульс, фиксирующий в блоке б счета и записи адреса число, соответствующее пройденным ячейкам, запоминаемое блоком 8 задания и отработки программы с энергонезависимыми триггерами памяти пройденного пути системой двоично-десятичного кода./
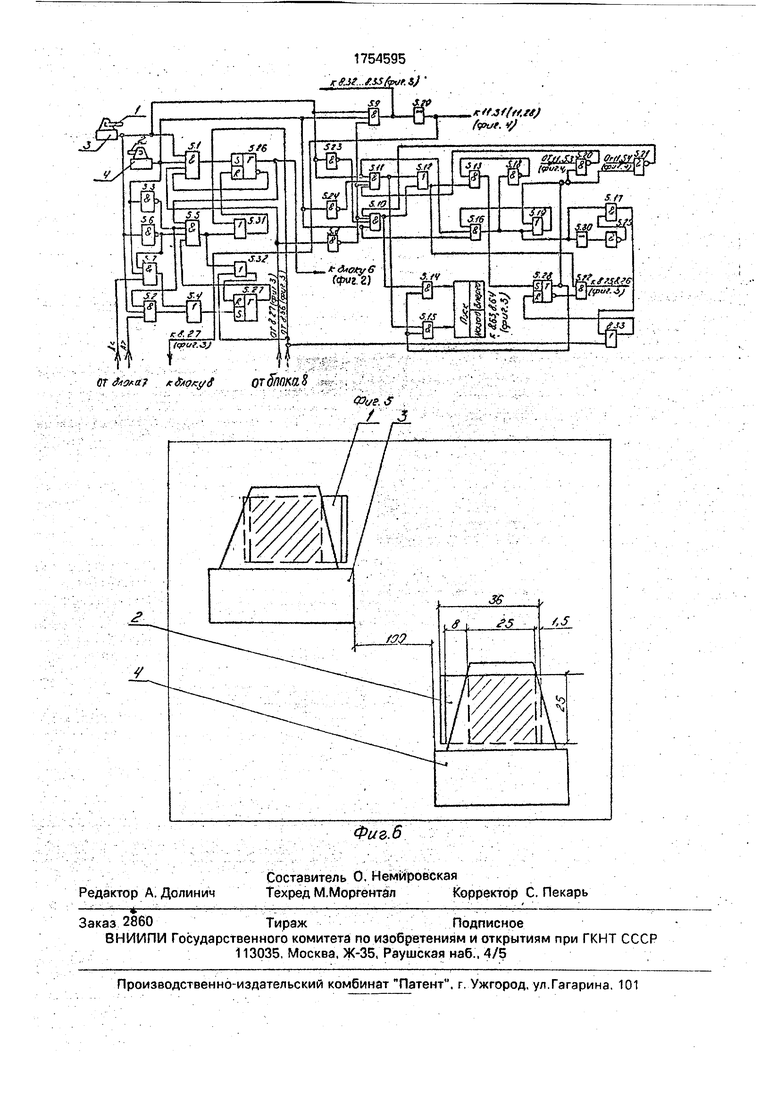
Адресные элементы 1 и 2 устанавливаются со смещением к центру по отношению к друг другу (фиг. 6), поэтому включение датчиков 3 и 4 происходит по очереди при движении штабелера слева направо. Сначала включается датчик 3, затем оба вместе, затем отключается датчик 3, а датчик 4 остается включенным, затем отключается датчик.
Установка адресных элементов производится из задания точности останова 8 мм, дифференциала хода датчика 1,5 мм и площади воздействия адресного элемента на датчик 25x25 мм.
Контроль взаимного положения штабе- леров осуществляется по каналу положения сумматор 13-компаратор 12-вход селектора 11, причем данные положения первого штабелера поступают на первый вход сумматора 14 с выхода блока б счета и записи адреса, где он суммируется с постоянным числом В, поступающим на второй вход сумматора 14 и определяющим минимальное допустимое расстояние между штабелера- ми по неравенству (П1 + В) + В1 П2 + В2. Здесь П1 и П2-текущее положение первого и второго штабелеров; В - минимальное допустимое расстояние, заданное постоянно (В ячейках); В1 и В2 - величины, отражающие степень загрузки от датчиков веса переносимых штабелерами грузов и пройденный путь штабелеров, т.е. учитывающие моменты инерции обоих штабелерое и создающие оптимальное расстояние между штабелерами (в ячейках) Величина (П1 + В) снимается с выхода сумматора 14, на первый вход которого в двоичном коде с выхода блока 6 счета и записи адреса подается информация о текущем положении первого штабелера, а на второй вход сигнал постоянный величины В, соответствующий минимально допустимому расстоянию между штабелерами. Результат суммирования подается на первый вход сумматора 13, где он суммируется с сигналом от блока задания адреса и отработки программы первого штабелера, характеризующего загруженность первого штабелера и пройденный им путь величиной В1. Результат суммирования, определяемый выражением (П1 + В) + В1, подается на первый вход компаратора
12, где он сравнивается с результатом, поданным на второй вход суммирования данных о положении второго штабелера, полученных с выхода блока 6 счета и записи адреса сигналом, поданным с выхода блока задания адреса и отработки программы 8 второго штабелера. характеризующего его загруженность и пройденный им путь на сумматоре 15, выходной сигнал которого определяется выражением П2 + В2. Результат сравнения выходных величин сумматоров 13 и 15 с выходов компаратора 12 подается на вход селектора 11. Если сигнал идет с выхода А, то оба штабелера продолжают беспрепятственно перемещаться , а если сигнал идет с выхода А, то в селекторе 11 включается система синхронизции движе- ния, включающая стоявший до этого штабе- лер в одном направлении с движущимися и это движение продолжается, пока не остановится ведущий штабелер, т.е по сигналу с выхода компаратора 12 А.
В том случае, если сигнал на выходе компаратора 12 А, то в селекторе 11 включается система анализа направления движения обоих штабелеров или их готовности к передвижению, подающая разрешение или запрет на перемещение каждого штабелера, получаемые на выходе селектора 11.
Начало торможения каждого штабелера при подходе к адресной ячейке, осуществляется блоком 8 задания адреса и отработки программы, на основании имеющихся данных о величине момента инерции штабелера, переключением привода с рейсовой скорости на доводочную, осуществляется блоком пути торможения, принцип работы которого известен, а точная остановка - по появлении сигнала А на выходе блока 7 сравнения, подающего сигнал остановки на вход блока 8 задания адреса и отработки программы
Для пояснения работы всей системы приведено описание работы основных узлов системы.
Работа блока 5 формирования счетного импульса и точного останова осуществляется следующим образом (фиг. 5).
При выполнении блоком 5 операции счета импульсов от блока 8 задания и отработки программы приходит на элемент 5.1 разрешение на его включение, а поскольку триггеры 5,26 и 5,27 перед этим были установлены в исходное состояние сигналом 1 от элемента 8,66 блока 8 через элементы 8,31, 8,32, элемент 5 1 откроется в момент одновременного включения датчиков 3 и 4 и включит триггер 5,26, с выхода которого снимается счетный импульс. После отключения датчика 4 открывается элемент 5,2, поскольку штабелер двигается в направлении Вперед и на вход 5,2 поступает единичный сигнал А от блока 7 (фиг 1). От инвертора 5.3 и от датчика 3 также поступает 1 на вход 5.2, который через элемент 5.4 включит триггер 5.27, подающий на вхбд элемента 5.5 единицу и подготавливая его к включению. После отключения датчика 3 че рез инвертор 5.6 на вход 55 поступает 1, а в результате чего элемент 5.6 отключит триг- rep 5.26 и 5.27. Далее процесс повторяется.
Операция точного останова осуществляется подачей сигнала О на вхбд инвертора 5.8 и элеимента 5.1, в результате чего операция счета прекрлщается, а при точном останове на выходе обоих датчиков 3 и 4 появляются единичные сигналы, поступающие на вход элемента 5.9, который выходным сигналом включит элемейт выдержки времени 5.29, определяющий наличие точ- ного останова выходным сигналом в блок 8 (фиг. 1).,..
Если штабелер останавливается неточно, то на выходе одного из датчиков сигнал отсутствует, элемент 5.9 отключает 6.29 и включается один из элементов 5. tO или 5.11, который через элементы 5,12 и 5.13 включает триггер 5.28, запускающий через элементы 5.14 или 5.15, передвижение штабелера в направлении Вперед или Назад. При включении одновременно датчиков 4 и 3 через элемент 5.1 б включается элемент 5.30 выдержки времени, контролирующий наличие точного останова и отключающий через элементы 5 16 и 5.17 триггер 5,28.
Работа блока 8 задания адреса и отра- ботки программы осуществляется следующим образом.
Запись и считывание адресов из блока 8 осуществляется по следующему принци- пу. С пулТ&та управ/шнм, входящего fсостав блока 8, Задается в десятичном коде ёдр ес нужной ячейки, который преобразуется 6 двбичйо-десятичный код и запоминается си стемой отработки программы, следящей за перемещением штабелера на соответствующих его положению скоростях, точной остановке в адресной ячейке и одновременном с остановкой штабелера запоминанием адреса ячейки, у которой произведена оста- новка для того, чтобы при следующем наборе на пульте управления имелась возможность сравнения в блоке 7 вновь зада- ваем ого адреса и адреса отправления штабелера для определения направления перемещения Вперед или Иазад.Упро- щенная функциональная схема блока 8 задания и отработки программы приведена на фиг. 3 для пояснения работы
Здесь задание в десятичном коде поступает с кнопок 8.1-8 9 на элементы 8.10-8.13 через преобразователь 8.14, представляющий собой разветвление проводов от кнопок 8.1-8.9 к элементам 8.10-8.13, где преобразуется в двоично-десятичный код и через элементы 8.15-8.18 определяющие разряд единиц, фиксируется на элементах памяти 8 19-8.22.
Переключение на разряд десятков и сотен осуществляет переключатель 8.23, соот- ветствуюицие сигналы с которого фиксируются на соответствующих элементах памяти десятков и сотен, которые условно не показаны, так как аналогичны элементам памяти единиц.
После набора программы от кнопок 8 1- 8.9 по команде Пуск от кнопки 8.24 и при наличии выходного сигнала блока 7 сравнения, поступающего на вход элементов 8.61 или 8.62 блоков задания и отработки программы штабелера, включается триггер 8.25 или 8.26, и штабелер перемещается до адресной ячейки, где по сигналу на выходе А блока 7 сравнения, поступающего в блок 8 задания и отработки программы, включается триггер 8,27 (фиг, 3), в результате чего штабелер ориентируется на точный останов в ячейке и по сигналу датчиков точной остановки 3 и 4 (фиг. 1} через блок 5 формирования счетного импульса и точного останова от элемента 5.9 (фиг. 5) на элементах памяти 7.28-8.31, через элементы 8.32-8.35 (фиг. 3), определяющие вес разряда единиц, фиксируется адрес, который для следующего задания будет адресом сравнения для определения направления перемещения штабелера на втором входе блока 7 сравнения (фиг. 1), причем элементы 8.28-8.31 отключаются только в следующем цикле, после включения направления движения штабелера Вперед или Назад.
Элементы памяти 8.19-8,22 отключаются в текущем цикле сигналом Конец цикла после полной отработки задания штабеле- ром.
Процесс формирования сигнала Конец цикла не имеет принципиального значения для системы совместного управления шта- белерами и в простейшем случае представляет выходной сигнал от элемента 5.29 (фиг 5), а полная схема строится на элементах 8.36-8.53.
Для формирования сигнала Конец цикла системе управления штабелером необходимо зафиксировать в памяти следующие операции.
Пуск первого передвижения штабелера. данная операция фиксируется на элементах 8.36-8.38
Первый останов штабелера Данная операция фиксируется на элементах 8.39- 8.41.
Пуск второго передвижения штабелера. Данная операция фиксируется на элементах 8.42-8.43.
Второй останов штабелера. Данная операция фиксируется на элементах 8.44- 8.47,
Пуск выдвижения захвата до крайнего положения. Данная операция фиксируется на элементах 8.48-8.50 и контролируется конечным выключателем 8.51.
Возвращение захвата в исходное состояние. Данная операция фиксируется на эле- ментах 8.52, 8.53 и контролируется конечным выключателем 8.54, выходной сигнал которого является командой Исходное состояние штабелера.
Выходной сигнал элемента 8.52 является сигналом Конец цикла.
Включение приводов перемещения штабелера и выдвижения захвата осуществляется включением реле 8.56-8.57, включение которых осуществляется через селектор 11 (фиг. 2), причем усилители сигналов от селектора и часть блокировки условно не показаны.
Для установки триггеров в исходное состояние при включении питающего напряжения замыкается блок-контакт 8.67 вводного выключателя (силовые контакты условно не показаны), подающего единичный сигнал на вход элемента 8.68, при этом если переключатель 8,23 поставлен в положение 0, единичный сигнал поступает на вход элемента 8.69, затем на вход элемента 8,68 и с его выхода на вход элемента 8.70, на второй вход которого поступает сигнал О с выхода элемента 8,71. Поэтому с выхода элемента 8.70 сигнал 1 поступает на входы R-триггеров устройства, устанавливая их в исходное состояние. При переводе переключателя 8,23 в положение Единицы, Десятки, Сотни на выходе элемента 8.71 формируется сигнал 1, поступающий на вход элемента 8.70, в результате чего на выходе элемента 8,70 появляется сигнал О, разрешающий включение триггеров устройства, Блок пути торможения 8.73 осуществляет переключение с рейсовой скорости на доводочную
Работа селектора 11 осуществляется следующим образом (фиг 4 ).
Отмена задания второму штабелеру при появлении сигнала А на выходе компаратора 10 осуществляется через элементы 11.1, 11.2, 11.3, контролирующие одновременно и минимально допустимое расстояние между штабелерами (сигнал А от 12) и наличие
пересекающих адресных ячеек (сигнал А от 10) на выходе элемента 11.1 Элементы 11.2 и 11,3 осуществляют контроль за исходным состоянием штабелеров (отсутствие выдви- нутого захвата определяет сигнал Исх. со- от. ШТ.,.), направлением перемещения штабелеров (сигнал От 7 ШТ...А (А), запретом включ ёййя Штабелера, получившего задание последним (сигнал обратной связи
0 с выхода 11.2 или 11.3).
Через инвенторы 11.4 или 11.5, элемент 11.6 включает триггер 11,46 контроля состояния запрета одному из штабелеров, который через элементы 11.7 или 11.8 дает
5 запрет элементам 11.9 или 11.10 включать триггеры пуска Штабелеров 11.47 или 11.48 соответственно ШТ1 Вперед или ШТ2 Назад.
Система синхронизации Движения
0 включается при наличии на выходе компаратора 12 сигнала А(фиг, 2), который поступает на вход элементов 11,11. или 11,12 (фиг. 4), которые при наличии сигналов с выходов блоков 7 сравнения штабелеров через эле5 менты 11.13 или 11,14 включают триггеры 11.47 или 11.48 соответственно. Если захват у стоящего штабелера находится в исходном состоянии, что контролируется подачей сигналов Исх, соот, ШТ... на элементы
0 11.15 или 11.16 от блока 8 задания и отработки программы последние включают стоящий до этого штабелер в одном направлении с движущимся через элемент 11.17 и триггер 11.49 или элемент 11.18 и
5 триггер 11.50. Если штэбелеры двигаются навстречу друг другу одновременно, но их адреса не пересекаются; те через элемент 11.19 включается триггер 11,51, накладывающий через элемент 11.20 запрет на отклю0 чение штабелеров от триггера 11.51, который производит отключение штабелеров в случае, если расс тбяййе Мё5кду штабелерами меньше допустимого (сигнал от 12 А на элементах 11.21, 11.22). Если захвату
5 штабелера не в исходном состоянии через элемент 11,23 или 11.24 происходит отключение двигающегося штабелера. Этими операциями осуществляется анализ направления движения штабелеров и опре0 деление их готовности к перемещению.
Если адреса не пересекаются и расстояние между штабелерами в пределах допустимого, что определяется элементами 11.25, 11.26, 11.27, входные цепи контроля
5 отключены и штэбелеры беспрепятственно перемещаются в заданных направлениях, при этом контроль включения и отключения штабелеров осуществляют элементы 11.9, 11.10, 11,17, 11,18, 11.28, 11,29, 11.30, 11.31, 11.33, 11.34, 11,49, 11.50, 11.53, 11.54.
Если расстояние между штабелерами не превышает допустимое, а расстояние между адресами штабелерой минимально допустимое, что определяется элементами 11.35 или 11,36, включающих триггеры 11.55 или 11.56, которые через элементы 11.37 или 11.38 посылают Запрет на выдвижение захватов штабелеров. Для установки тригге- рОй e исходное состояние, при включении питания, подается сигнал сброса через элементы 11.41, 11.42, 11.43, 11.44.
Блок-схема системы соШ§6тйВг управления штабелерами (фиг. 1) промазывает, что при одинаковой межблочной связи смс-1 темы управления штабелером создается неоднозначная структура межблочных связей блок-схемы совместного управления штабелерами, позволяющая создавать необходимый алгоритм управления совместно работающими штабелерами без изменения функциональной схемы каждого штабелера в отдельности.
Система совместного управления штабелерами значительно упрощена за счет значительного уменьшения числа датчиков поисков на штабелерах, а следовательно, и системы обработки информации от датчиков поиска, уменьшения металлической полосы на адресные элементы (шунты), поскольку съем информации импульсный от двух Датчиков, а также создан оптимальный режим допустимости сближения штабеле- рое на основании контроля моментов инерции
Формула изобретения
Система совместного управления шта- беяерами, перемещающимися по одному пути, содержащая Для каждого штабелерй датчики поиска заданной ячейки, блок задания адреса и отработки программы, блок сравнения, сумматоры, компараторы, се лектор, отличающаяся тем, чтв, с Целью обеспечения выбора штабелерами оптимального начала торможения с Одновременным упрощением системы, она содержит для каждого штабелера блок формирования счетного импульса и точного останова штабелера, блока счета и записи адреса, при этом выходы двух датчиков поиска подключены к первому и второму входам блока формирования счетного импульса, первый ёыход которого подключен к пёрёому входу блока счета, соединенного первым выходом с первым входом блока сравнения, подключенного первым и вторым выходами к третьему и четвертому входам блоков формирования счетного импульса, счета, задания адреса и отработки программы, а третий выход блока сравнения подключен к второму входу блока задания, соединенного первым выходом с вторым входом блока
счета, вторым выходом - с первым входом блока сравнения, третим и четвертым выходами - с пятым и шестым входами блока формирования счетного импульса, подключенного вторым - шестым выходами к второму, пятому, шестому, седьмому и восьмому входам блока задания адреса, девятый, десятый и одиннадцатый входы которого подключены к первому, второму и третьему выходам селектора для первого
штабелера и к четвертому, пятому и шестому выходам - для второго штабелера, при этом седьмой выход селектора соединен с седьмым входом блока формирования счетного импульса, седьмой выход которого
подключен к первому входу селектора для первого штабелера и второму входу для второго штабелера, соединенного третьим и четвертым входами для первого штабелера и пятым и шестым входами - для второго
штабелера с первым и вторым выходами блока сравнения, а седьмой - одиннадцатый входы селектора для первого штабелера и двенадцатый - шестнадцатый входы - для второго штабелера подключены к третьему
- седьмому выходам блока задания адреса, восьмой выход которого для первого штабелера подключен к первому входу первого сумматора, соединенного вторым входом с постоянным сигналом, а выход подключен к
первому входу компаратора, связанного вторым входом с ёосьмым выходом второго штабелера, при этом три выхода компаратора подключены к семнадцатому, восемнадцатому и девятнадцатому входам селектора,
а одиннадцатый выход блока задания адреса первого штабелера подключен к первому входу второго сумматора, на второй вход которого подключен выход третьего сумматора, соединенного первым входом с пятым выходом блока счета первого штабелера, а вторым - с постоянным сигналом, при этом выход второго сумматора подключен к первому входу компаратора канала положения, три выхода которого
подключены к двадцатому, двадцать первому и Двадцать второму входам селектора,а второй вход подключен к четвертому сумматору, сбединенному первым входом с пятым выходом блока счета второго штабелера, а вторым входом - с одиннадцатым выходом блока задания адреса- второго штабелера
счет
ШШ кЯЮЗ-фигЛ
Л i
Ч
Л
(риг)
пошен№
и«(Ф«гО
Л л
п
-t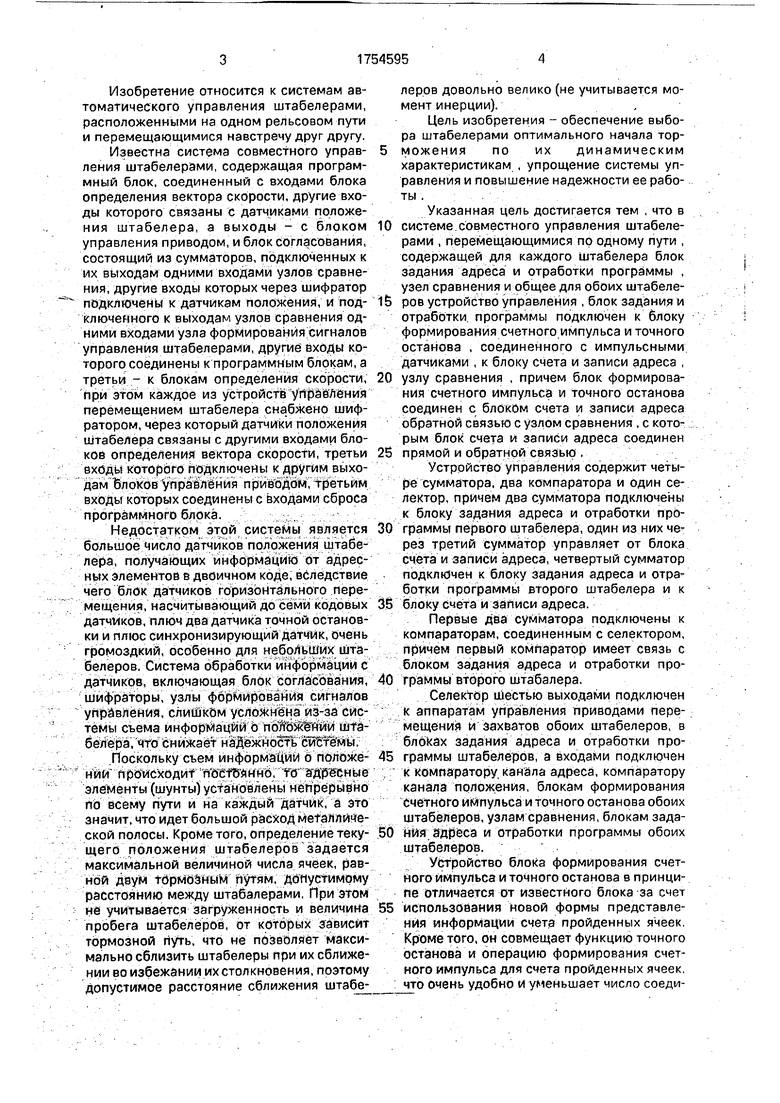

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| Многокоординатное устройство для управления | 1989 |
|
SU1777121A2 |
| Устройство для программного управления технологическим оборудованием | 1986 |
|
SU1372277A1 |
| Устройство для программного управления технологическим оборудованием | 1987 |
|
SU1423982A1 |
| СПОСОБ ДЛЯ ЦИФРОВОЙ СУБСТРАКЦИОННОЙ АНГИОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2043073C1 |
| Тренажер оператора радиоэлектронной аппаратуры | 1989 |
|
SU1658193A1 |
| Многопрограммный регулятор температуры | 1983 |
|
SU1136123A1 |
| Устройство для управления приводом кранштабелера | 1984 |
|
SU1193690A1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ПОГРАНИЧНОГО КОНТРОЛЯ | 2006 |
|
RU2316811C1 |
| Имитатор абонентов | 1986 |
|
SU1325490A2 |
Сущность изобретения: система содержит деа адресных элемента (1 и 2), 2 датчика поиска заданной ячейки (3,4), блок формирования счетного импульса и точного останове штабелера (5), блок счета и записи адреса 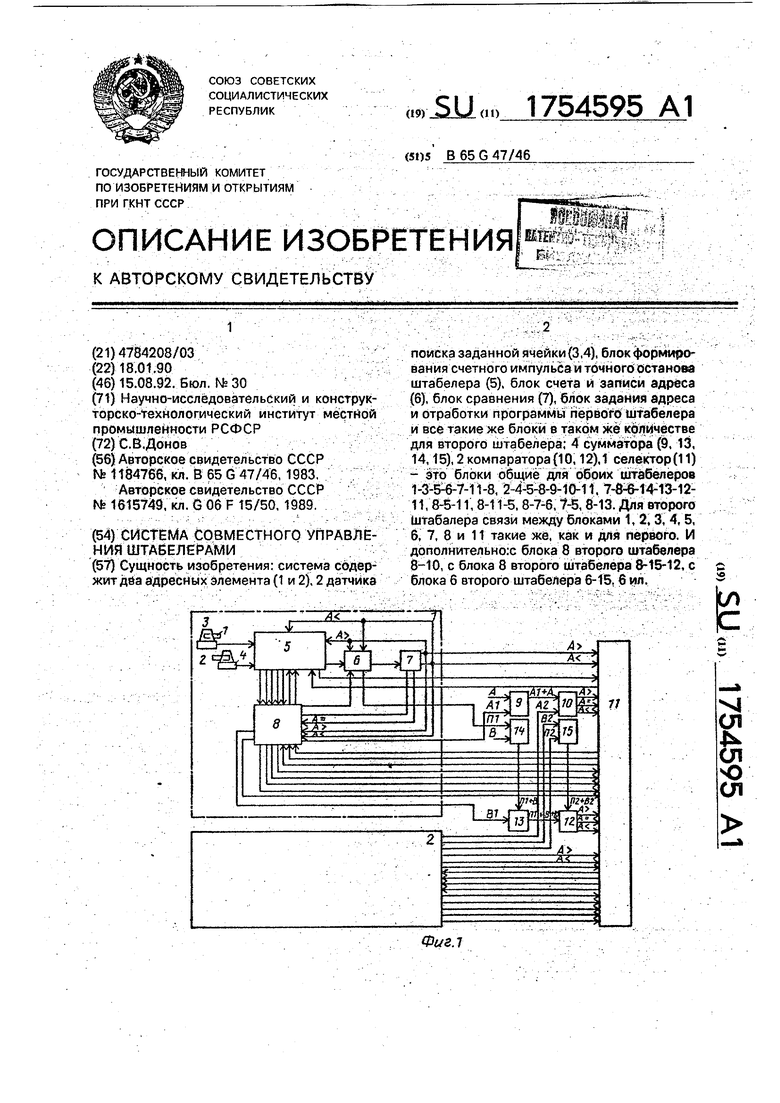
ОТ-fi Г )1
(fpU2.-f)
.ВПЕРЕН.
1Мж.
1сШГ Д. :ЗБРОЈ
- -у
-Э
RPR3K
№
СбРОС
C5PQC
ш л ел
OD
сл
ШТ1Ш1Т2)-6ПОТД
ОТ-fi ГипчТштг)-Н)Ш )1 7Ц/гШг)-ЗЩ
fpU2.-f)
1ШШ Ш1Ш кштг)Ж
ЛЯЛЯНИЕ ЯДРССД.
кЗРригЛ.л, ..
(l5)U
шштж,
мШтсоаМ
ОЯШ
к Мсфмг.О
а&фяа yxfy 09яд
§
§g
i 1 1 i
3
й
I
Редактор А. Долинич
Составитель О, Немировская
Техред М.МоргенталКорректор С. Пекарь
Фие.б
| Система совместного управления кранами-штабелерами | 1983 |
|
SU1184766A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
