Изобретение относится к подъемно-транспортным системам, а именно к системам управления автоматическими кранами-штабелерами, расположенными на одном пути.
Цель изобретения - повышение точности остановки кранов-штабелеров в заданной точке пути и сокращение времени на управление.
На фиг. 1 представлена функциональная схема системы; на фиг. 2 - функциональная схема блока согласования; на фиг. 3 - принципиальная схема узла формирования сигнала управления кранами-штабелерами.
Система (фиг. 1) включает в себя для каждого крана-штабелера программный блок 1, соединенный с одними его выходами одними входами блок 2 определения вектора скорости крана-штабелера, другие входы которого соединены с датчиками 3 положения крана, а выходы - с блоком 4 управления приводом крана. На выходе датчиков 3 подключен шифратор 5. Эти блоки входят в состав устройства 6 управления каждым краном-штабелером.
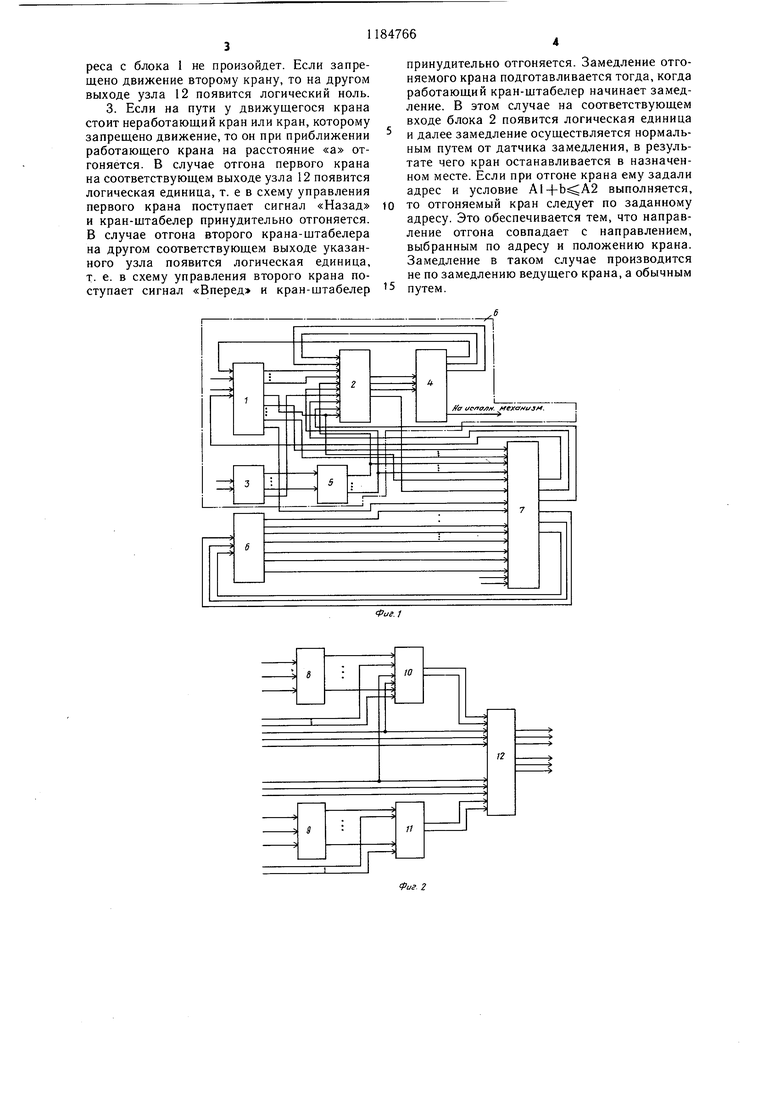
Каждое из устройств 6 подключено к блоку 7 согласования, который включает в себя на входе сумматоры 8 и 9 (фиг. 2), подключенные выходами к узлам 10 и 11 сравнения, выходы которых подключены к одним и другим входам узла 12 формирования сигналов управления кранами-штабелерами.
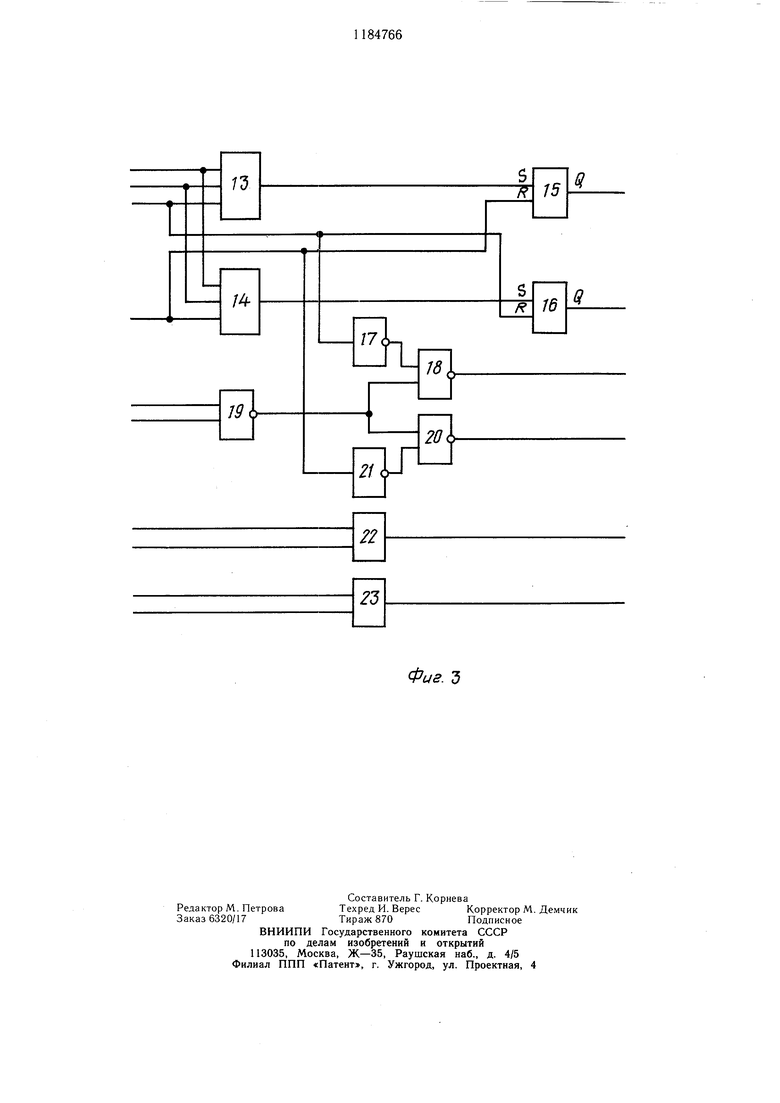
Узел 12 включает в себя логические элементы ИЛИ 13 и 14 (фиг. 3), подключенные к их выходам одними входами триггеры 15 и 16, элементы ИЛИ-НЕ 17-21 и элементы И 22 и 23.
Система работает следующим образом.
Каждой ячейке по горизонтали соответствует неизменный адрес в двоичном коде, причем нумерация для обоих кранов-штабелеров единая. В каждой ячейке расположен свой индивидуальный адресный бесконтактный датчик, входящий в состав датчиков 3. На кране установлен щунт, длина которого подобрана таким образом, что практически он все время находится в одном из адресных датчиков. При нахождении щунта в зазоре датчика на выходе последнего появляется сигнал, поступающий на шифратор 5, на выходе которого появляется двоичное число, соответствующее местонахождению крана-штабелера по горизонтали. Адрес поступает в блок 1 в параллельном двоичном коде. В нем происходит запись заданного числа. В случае, если с блока 7 пришло разрешение на работу данного крана штабелера, информация в параллельном двоичном коде считывается с блока 1 и поступает в блок 2. В случае отсутствия разрешения J информация об адресе далее в схему не поступает.
В блоке 2 формируется направление движения и сигнал на начало замедления. В связи с повышенной скоростью передвижения
и высокими требованиями к точности останова применяется датчик замедления, срабатывающий от шунтов, установленных в каждой ячейке. Сам датчик замедления установлен на кране-штабелере. Замедление начинает подготавливаться за одну ячейку от заданной. При сравнении одинаковых двоичных чисел за одну ячейку до заданной появляется логическая единица. Логическая единица на одном из входов блока 2 появляется в момент срабатывания датчика замедления, в результате на другом входе блока появляется логическая единица, являющаяся сигналом к замедлению. Сигналы с блока 2 поступают в блок 4, в функции которого входит непосредственное управление приводом. Блок 4 выполнен по типовой схеме реверсивного электропривода.
На вход блока 7 поступает информация об исполняемом адресе с блока 1 каждого крана-штабелера, о текущем местонахождеQ НИИ каждого крана-штабелера - с шифратора 5 и некоторые служебные сигналы с блоков 1 и 2.
В блоке 7 происходит оценка двух неравенств.
, 5 гдеП -текущее местонахождение первого
крана; П2-текущее местонахождение второго
крана; а -расстояние (в ячейках), равное
двум тормозным путям крана. Сравнение числа П1 + а и числа П2 производится в узле 11. Результат сравнения поступает в узел 12.
А1 -f ,
где А1 - исполняемый адрес первого кранаштабелера;
А2-исполняемый адрес второго крана; b - минимально допустимое расстояние (в ячейках) между кранамиштабелерами (число «Ь вводится в схему параллельным двоичным 0кодом).
Суммирование А1 с константой «Ь производится в сумматоре 8, сравнение числа А1+Ь и числа А2 производится в узле 12, в котором производится логическая обработка информации, поступающей с узлов 10 5 и 11, а также с блока 2 и блока 1 каждого крана. Возможны следующие режимы двух кранов-штабелеров.
1.При выполнении условия А1+Ь: А2 обоим кранам разрешается беспрепятственное перемещение. В этом случае на соответствующих выходах узла 12 появится логическая единица, поступающая в блок 1 обоих кранов, разрещая считывание с блока 1 в схему.
2.При невыполнении условия 5 крану-штабелеру, получивщему адрес позже,
движение запрещено. Если это первый кран, то на одном из указанных выходов узла 12 появится логический ноль и считывания ад
реса с блока 1 не произойдет. Если запрещено движение второму крану, то на другом выходе узла 12 появится логический ноль. 3. Если на пути у движущегося крана стоит неработающий кран или кран, которому запрещено движение, то он при приближении работающего крана на расстояние «а отгоняется. В случае отгона первого крана на соответствующем выходе узла 12 появится логическая единица, т. е в схему управления первого крана поступает сигнал «Назад и кран-штабелер принудительно отгоняется. В случае отгона второго крана-щтабелера на другом соответствующем выходе указанного узла появится логическая единица, т. е. в схему управления второго крана поступает сигнал «Вперед и кран-штабелер
принудительно отгоняется. Замедление отгоняемого крана подготавливается тогда, когда работающий кран-щтабелер начинает замедление. В этом случае на соответствующем входе блока 2 появится логическая единица и далее замедление осуществляется нормальным путем от датчика замедления, в результате чего кран останавливается в назначенном месте. Если при отгоне крана ему задали адрес и условие выполняется, то отгоняемый кран следует по заданному адресу. Это обеспечивается тем, что направление отгона совпадает с направлением, выбранным по адресу и положению крана. Замедление в таком случае производится не по замедлению ведущего крана, а обычным путем.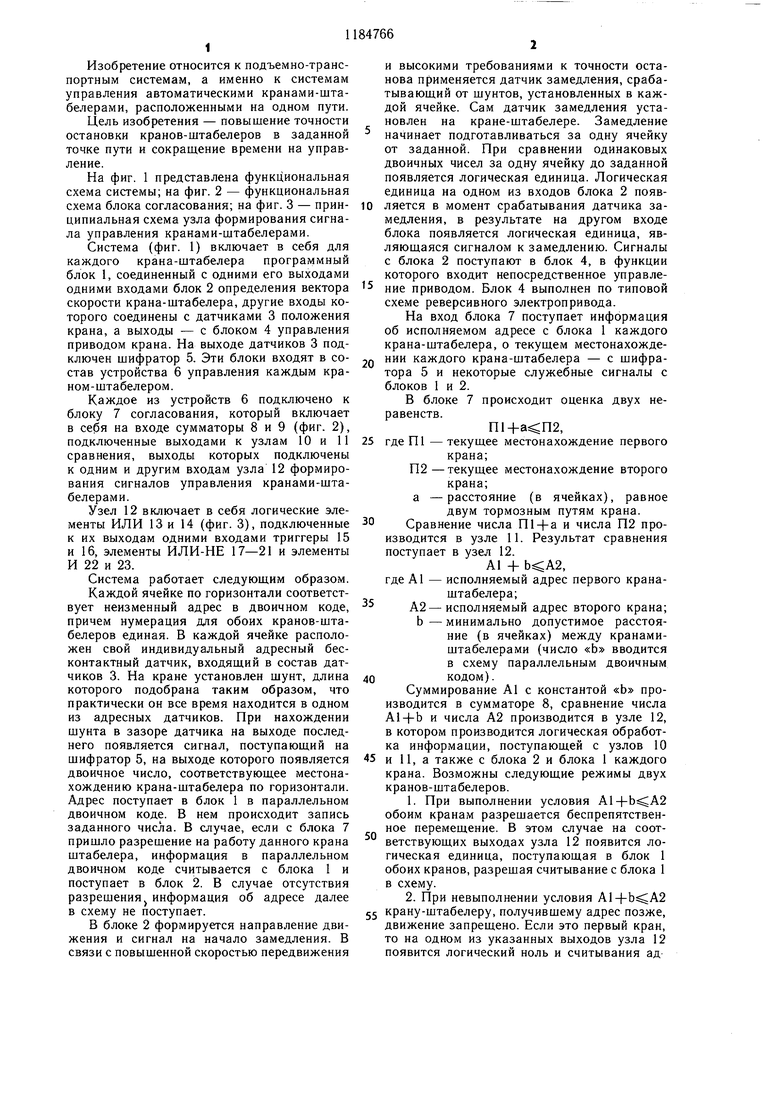
| название | год | авторы | номер документа |
|---|---|---|---|
| Система совместного управления штабелерами | 1990 |
|
SU1754595A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯШТАБЕЛЕРОМ | 1969 |
|
SU257577A1 |
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| Устройство для адресного управления объектом | 1982 |
|
SU1109714A1 |
| Устройство для автоматического управления мостовым стеллажным краном-штабелером | 1984 |
|
SU1235795A1 |
| Устройство для автоматического управленияшТАбЕлЕРОМ | 1978 |
|
SU819811A2 |
| Устройство для автоматического адресования транспортного средства | 1973 |
|
SU468562A1 |
| Устройство для автоматического адресования транспортного средства | 1984 |
|
SU1229778A1 |
| Устройство для обработки и передачи информации учета товарной нефти | 1987 |
|
SU1416978A1 |
| Устройство для управления подъемно-транспортным механизмом | 1978 |
|
SU959037A2 |
1СИСТЕМА СОВМЕСТНОГО УПРАВЛЕНИЯ КРАНАМИ-ШТАБЕЛ ЕРАМИ, перемещающимися по одному пути, содержащая для каждого крана устройство управления перемещением, включающее в себя программный блок, соединенный с одними его выходами одними входами блок определения вектора скорости крана-щтабелера, другие входы которого связаны с датчиками положения крана, а выходы - с блоком управления приводом, и блок согласования, отличающаяся тем, что, с целью повышения точности остановки кранов-щтабелеров в заданной точке пути и сокращения времени на управление, блок согласования состоит из сумматоров, подключенных к их выходам одними входами узлов сравнения, другие входы которых через шифратор подключены к датчикам положения, и подключенного к выходам узлов сравнения одними входами узла формирования сигналов управления кранами-штабелерами, другие входы которого подсоединены к программным блокам, а третьи - к блокам определения скорости, при этом одна и другая группы выходов которого являются выходами блока согласования и подключены соответственно к входам разрешения считывания программных блоков и к третьим входам блоков определения вектора скорости, при этом каждое из устройств управления перемещением кранаштабелера снабжено шифратором, через который датчики положения крана связаны с другими входами блоков определения вектора скорости, четвертые входы которого подключены к другим выходам блоков управления приводом, третьи выходы которых соединены с входами сброса программного блока. 2. Система по п. 1, отличающаяся тем, что узел формирования сигналов управления кранами-штабелерами состоит из логических элементов ИЛИ, ИЛИ-НЕ, И и триггеров, выходы которых являются одной группой выходов блока согласования, а один и другой входы соединены соответственно с шинами командных сигналов и с выходами одного и другого элементов ИЛИ, одни и другие входы которых объединены и являются первыми входами узла, а третьи входы объединены с первыми входами триггеров и 00 4 1 входами одного и другого элементов ИЛИНЕ, выходы которых соединены с одними входами соответственно третьего и четвертого элементов ИЛИ-НЕ, выходы которых 05 являются второй группой выходов блока 05 согласования, а другие входы объединены и подключены к выходу пятого элемента ИЛИ-НЕ, входы которого являются другими входами узла, третьими входами которого являются входы одного и другого элементов И, выходы которых являются другими выходами блока согласования.
Фиг. Ъ
| Система управления кранами-штабелерами,расположенными на общих путях | 1976 |
|
SU610771A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
