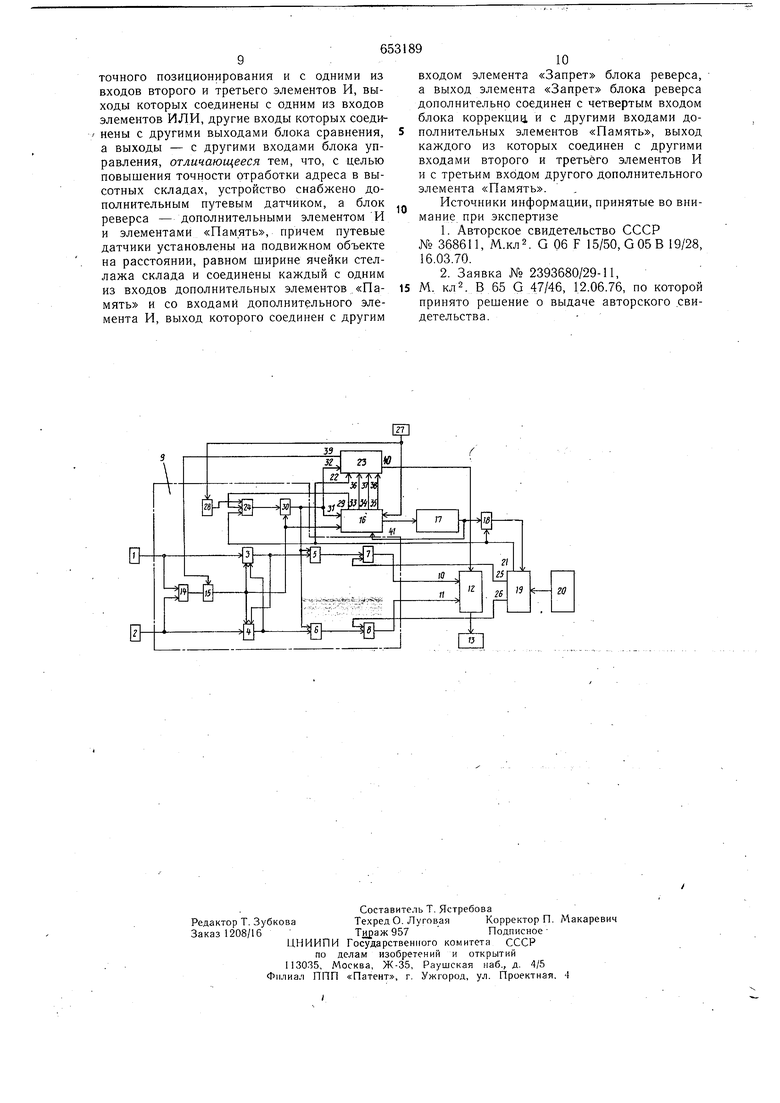
Изобретение относится к промышленному транспорту, а, именно к устройствам для программного управления подвижным объектом, преимущественно краном-штабелером. Известно устройство программного управления подвижным объектом, содержащее программные блоки адресов ячеек и погрузочно-разгрузочных операций, подключенные к счетным блокам адресов горизонтальных и вертикальных рядов стеллажей, соединенные с блоками управления горизонтальным, вертикальным движением транспортного механизма и блоком управления рабочим органом, двоичный реверсивный счеТчик, счетный вход которого подключен через генератор импульсов к датчикам положения, а другие входы счетчика и входы генератора импульсов подключены к коммутатору, соединенному с генератором тактовых импульсов, а выходы двоичного реверсивного счетчика подключены ко входу дешифратора, первая и Последняя шина которого подключены ко входам первого триггера, выход которого через первую и третью схемы .И соединен с первыми входами триггеров знакасигналов, другие входы которого через первую и вторые схемы ИЛИ, вторые входы которых через вторую схему И, соединенную с нулевой линией, подключены к нулевой выходной щине дешифратора, другие выходные шины которого попарно 1 и (п-1); 2 и (п-2) через последовательно соединенные дополнительные схемы ИЛИ и И подключены ко входам триггера уровня команд, при этом один из входов всех схем И соединен с общей шиной коммутатора, а выходы триггеров знака и уровня команд подключены к блоку управления горизонтальным движением 1. Недостатком этого устройства является необходимость ру.чного управления для коррекции положения транспортного механизма за пределами взаимодействия датчиков с элементами конструкции стеллажей. Наиболее близким техническим решением к изобретению является устройство програмного управления подвижным объектом, содержащее датчик путевых импульсов, датчик шаговых импульсов, элемент «Запрет, блоки коррекции, точного позиционирования, формирования единичных импульсов управления, сравнения задания программы и блок реверса, выполненный на элементах И, ИЛИ, «Запрет, «Память, схеме задержки времени, причем блок задания программ.ы соединен с одним из входов блока сравнения, датчик шаговых импульсов соединен с первым входом блока коррекции, один, другой и третий выходы которого соединены с соответствующими входами блока точного позиционирования, один из выходов которого соединен с одним из входов блока управления, четвертый выход блока коррекции соединен со входом блока формирования единичных импульсов, выход которого соединен с нулевым входом блока коррекции и одним из входов элемента «Запрет, выход которого соединен с другим входом блока сравнения, один из выходов которого соединен с запрещающим входом элемента «Запрет, четвертым входом блока точного позиционирования и одним из входов одного из элементов И блока реверса, другой вход которого соединен с пятым выходом блока коррекции, а третий через схему задержки -с датчиком шаговых импульсов, а выход соединен с одним из входов элемента «Память, другой вход которого соединен с вь1ходом элемента «Запрет блока реверса, запрещающий вход которого соединен с другим выходом блока точного позиционироваНИН, а выход - с другим входом блока коррекции, с пятым входом блока точного позиционирования и с одним из входов второго и третьего элементов И, выходы которых соединены с одним из входов элементов ИЛИ, другие входы которых соединены с другими выходами и блока сравнения, а выходы - с другими входами блока управления 2. Недостатком такого устройства является низкая точность отработки адреса при установке грузоподъемника крана-штабелера по центру каждой ячейки вертикальных рядов высотных складов, вследствие чего при отклонении элементов конструкции стеллажа от проектных отметок становится невозможным выполнение операций извлечения или установки грузов в ячейки. Цель изобретения - повышение точности отработки адреса в высотных складах. Поставленная цель достигается тем, что устройство снабжено дополнительным путевым датчиком, а блок реверса - дополнительными элементом И и элементами «Память, причем путевые датчики установлены на подвижном объекте на расстоянии, равном ширине ячейки стеллажа склйда и соединены каждый с одним из входов дополнительных элементов «Память и со в:, одами дополнительного элемента И, выход которого соединен с другим входом элемента «Запрет блока реверса, а выход элемента «Запрет блока реверса дополнительно соединен с чётвертым входом блока коррекции и с другими входами дополнительных элементов «Память, выход каждого из которых соединен с другими входами второго и третьего эле653189ментов И и с третьим входом другого дополнительного элемента «Память. На чертеже приведена структурная схема устройства. Путевые датчики 1 и 2 устанавливаются на грузоподъемнике щтабелера соответственно положению элементов конструкции стеллажа, образующих ряд ячеек, например вертикальный, и связаны соответственно через элементы 3 и 4 «Память, первые входы элементов 5 и 6 И, первые входы элементов 7 и 8 ИЛИ блока 9 реверса с входами 10 и 11 прямого и обратного направлений движения блока 12 управления электроприводом 13, а через 14 И, элемент 15 «Запрет блока 9 реверса, блок 16 коррекции, блок 17 формирования единичных импульсов и элемент 18 «Запрет - с блоком 19 сравнения, к которому подключен блок 20 задания программы. Выход 21 совпадения блока 19 подключен к входу запрета элемента 18, к входу 22 блока 23 точного позиционирования и к первому входу элемента 24 И блока 9 реверса. Выходы 25 и 26 прямого и обратного направлений движения блока 19 соединены со вторыми входами, элементов 7 и 8 ИЛИ. Датчик 27 шаговых импульсов, кинематически связанный с электроприводом 13, подключен к входу накопления импульсов блока 16 коррекции и через схему 28 задержки времени к третьему входу элемента 24 И, второй вход которой связан с выходом 29 допуска точного останова блока 16. Выход элемента 24 И через элемент 30 «Память, нулевой вход которой связан с выходом эле.мента 15 «Запрет, подключен ко вторым входам элементов 5 и 6 И к входу 31 установки блока 16 коррекции в режим «вычитания и к входу 32 включения блока 23 точного позиционирования. Выходы 33 меньшего числа, 34 большего числа и 35 разрядов числа блока 16 соединены с соответствующими входами 36, 37, и 38 блока 23, один выход 39 которого подключен к входу запрета элемента 15 «Запрет блока 9, а другой 40 - к входу регулирования скорости блока 12 управления электроприводом 13. Вход 41 установки блока 16 коррекции в Нулевое состояние подключён к выходу блока 17 формирования одиночных импульсов. Первые нулевые входы элементов 3 и 4 «Память подключены к выходу элемента 15 «Запрет, второй нулевой вход элемента 3 связан с выходом схемы 4, в то время как второй нулевой вход схемы 4 соединен с выходом, элемента 3. , Устройство работает следующим образом. В неподвижном состоянии штабелера на позиции адресования путевые датчики 1 и 2, одновременно взаимодействуя с соответствующими элементами конструкции стеллажа например стойками, образующими вертикальный ряд ячеек, генерируют сигналы, которые направляются на оба входа элемента 14 И блока 9 реверса. Сигнал с ее выхода через элемент-15 «Запрет поступает на нулевые входы элементов 3, 4 и 30 «Память, которые устанавливаются в нулевые состояния и на вход блока 16 коррекции. Ввод нового адреса в блок 20 задания программы сопровождается посылкой блоком 19 сравнения в зависимости от действительного положения штабелера сигнала направления движения с выхода 25 ,(26) через элемент 7 (8) ИЛИ на вход 10 (11) блока 12 управления электроприводом 13. В первоначальный момент движения штабелера в направлении заданного адреса, вдоль вертикальных рядов ячеек стеллажа, например «Вперед («Назад), первым при уходе с позиции останова прекращает взаимодействовать со стойкой, например, датчик 1 (2), в то время как датчик 2 (1) продолжает взаимодействовать с соответствующей стойкой. Исчезновение сигнала на одном из входов элемента 14 И вызывает пропадание сигнала на ее выходе. Это позволяет элементу 4 (3) «Память по сигналу еще взаимодействующего со стойкой датчика 2 (1) перейти в единичное состояние. На выходе элемента 4 (3) «Память появляется сигнал, определяющий направ, ление перемещения стеллажного щтабелера вперед (назад), Который будет сохраняться и при прекращении в последующий момент взаимодействия датчика 2 (1) со стойкой. При подходе штабелера к очередному ряду ячеекпервым начинает взаимодействовать со стойкой датчик 1 (2). сигнал датчика 1 (2) не может изменить .нулевого состояния связанного с ним элемента 3 (4) «Память, который взаимно сблокирован с установленным ранее в единичное состояние элементом 4 (3) «Память. В следующей фазе движения штабелера датчики 1 и 2 вновь будут одновременно взаимодействовать со стойками очередного ряда ячеек. Сигнал с выхода элемента 15 «Запрет вновь установит элемент 4 (3) «Память в нулевое состояние и проконтролирует нулевые состояния элементов 3 (4) и 30 «Память. Таким образом, в процессе движения штабелера один из элементов 4 (3) «Память будет периодически устанавливаться в единичное состояние и при одновременном взаимодействии со стойками датчиков 1 и 2 переводится в нулевое состояние; в то время как элемент 3 (4) и 30 «Память сохраняют свое нулевое состояние. Сигнал с выхода элемента 15 «Запрет направляется также через блоки 16 и 17, элемент 18 «Запрет в блок 19 сравнения, который от.мечает изменение истинного положения штабелера в процессе движения к заданному адресу на один ряд ячеек. Достоверность считывания информации о текущем положении штабелера в случае нарушения одновременного взаимодействия датчиков 1 и 2 со стойками обеспечивается блоком 16 коррекции, работающем в режиме сложения импульсов шагового датчика 27. При накоплении числа импульсов, равном числу шагов, соответствующих расстоянию между рядами ячеек, блок 16 коррекции посылает через блок 17 и. элемент 18 «Запрет резервный сигнал в блок 19 сравнения. Блок 17 формирования одиночных импульсов исключает дублирование сигналов на выходе. Выходной сигнал блока 17 поступает на вход 41 блока 16 коррекции, который устанавливается в нулевое состояние., При совпадении заданного и текущего адресов сигнал на выходе 25 (26) блока 19 исчезает и блок 12 управления переводит электропривод 13 в режим эффективного торможения для экстренного останова штабелера. Сигнал совпадения на выходе 21 блока 19 исключает дальнейшее прохождение одиночных импульсов через элемент 18 «Запрет в блок 19, устанавливается на первом входе элемента 24 И и подается на вход 22.блока 23 точного позиционирования. Выбег штабелера за пределы зоны допуска точного останова отмечается посылкой сигнала с выхода 29 блока 16 на второй вход элемента 24 И. Длина выбега штабелера в пределах расстояния между смежными позициями адресования сопровождается вначале посылкой сигнала с выхода 33 меньшего числа блока 16, а посылкой сигнала с выхода 34 большего числа соответственно на входы 36 и 37 блока 23. На выходе 39 блока 23 появляется сигнал, который поступает навход запрета элемента 15 «Запрет и прекращает поступление сигнала с ее выхода на вход блока 16 коррекции и нулевые входы элементов 3, 4 и 30 «Память. Сигнал с выхода 39 используется также запрещения появления сигнала на вь1ходе блока 17, устанавливающего блок 16 коррекции в нулевое состояние. Таким образом, происходит последовательно непрерывное накопление блоком 16 импульсов шагового датчика 27 при прохождении позиции адресования в результате выбега штабелера после возникновен-ия сигнала совпадения на выходе 21 блока 19. Останов штабелера вызывает прекращение подачи импульсов шаговым датчиком 27. Блок 16 коррекции сохраняет итоговое число накопленных шаговых импульсов, пропорциональное фактической длине выбега штабелера относительно заданной позиции адресования. Сигналы разрядов числа щаГОВЫХ импульсов с выхода 35 блока 16 . коррекции поступают на вход 38 блока 23 точного .позиционирования. Элемент 4 (3) «Память блока 9 реверса сохраняет сигнал направления выбега, который посылается на первый вход элемента 6 (5) И. Исчезновение шаговых импульсов на входе схемы 28 задержки времени приводит к появлению сигнала на/ее выходе, который подается на третий вход элемента 24 И. Установка времени может , быть отрегулирована так, что уже при малой частоте подачи импульсов датчиком 27 на выходе схемы 28 появится сигнал. Выходной сигнал элемента 30 «Память подается на вторые,входы элементов 5 и 6 И, на .вход 31 блока 16 и вход 32 блока 23. Блок 16 коррекции устанавливается в режим . вычитания, а на выходе 40 блока 23 точного позиционирования появляется ,аналоговый сигнал. Элемент 6 (5) И,при наличии на ее первом входе ранее поданного сигнала с выхода элемента 4 (3) «Пам.ять,посылает через элемент 8 (7) ИЛИ сигнал на вход 11 (10) обратного (прямого) направления движения блока 12 управления. Штабелер возвращается в пройденную заданную позицию адресования, на который был получен сигнал совпадения, со скоростью, определяемой аналоговым сигналом блока 23. Приближение штабелера к месту адресования в процессе точного позиционирования сопровождается вычитанием импульсов, подаваемых датчиком 27 в блок 16 коррекции и, следовательно, уменьшением установленного в нем числа пропорционально-сокращае.мой длине выбора. Аналоговый сигнал на выходе 40 блока 23, уровень которого изменяется в функции пути, обеспечивает опт11мальное регулирование скорости возвращения штабелера в заданную позицию адресования с высокой точностью в минимально возможное время. , ..В обратном порядке исчезают сигналы на выходе 34 блока 16, затем на ВЕ гходе 33 и, наконец, на выходе 29. Это прекращает посылку сигнала с выхода 39 блока 23 на входы запрета блока 17 и элемента 15 «Запрет. Процесс пози ционирования штабелера у заданной ячейки завершается центрированием грузоподъемника относительно стоек стеллажа и фиксируется появлением сигналов датчиков 1 и 2 на обоих входах эле.ментов 14 И. Их выходной сигнал вызывает появление сигнала навыходе элемента 15 «Запрет, который устанавливает элементы 3, 4 и 30 «Память и блок 16 коррекции в нулевое состояние. Исчезновение сигнала на входе 31 переводит блок 16 коррекции сложения импульсов, пропадает сигнал на вхо-де 32 блока 23, что вызывает исчезновение аналогового сигнала на выходе 40, а также
/ ::. :
653189 на входе 11 (10) блока 12, отключающего электропривод 13. Если ошибка точности останова превысит заданный допуск, выход 29 блока 16 коррекции, йачавшего накапливать новую серию шаговых импульсов, вновь пошлет сигнал на второй вход элемента 24 И, который уста 1овит элемент 30 «Память в единичное состояние и процесс позиционирования продолжается уже в обратном направлении, обеспечивая возвращение стеллажного крана к мосту адресования. Самопроизвольное или принудительное смещение штабелера относительно места адресования автоматически возобновляет процесс позиционирования. При вводе нового адреса в блок 20 задания программы сигнал совпадения на выходе 21 блока 19 сравнения Исчезает и стеллаж Ьй кран вновь способен перемещаться в необходимом направлении. Формула изобретения Устройство программного управления подвижным объектом, преимущественно краном-штабелером, содержащее датчик путевых импульсов, датчик шаговых импульсов, элемент «Запрет, блоки коррекции, точного позиционирования, формирования единичных импульсов, управления, сравнения, задания программы и блок реверса, выполненный на элементах И, ИЛИ, «Запрет, «Память, схеме задержки времени, причем блок задания программы соединен с одним из входов блока сравнения, датчик шаговых импульсов соединен с первым входом блока коррекции, один, другой и третий выходы которого соединеньг с соответствующими входами блока точного позиционирования, один из выходов которого соединен с одним из входов блока управления, четвертый выход блока коррекции соединен с входом блока формирования единичных импульсов, выход которого соединен с нулевым входом блока коррекции и с одним из входов элемента «Запрет,-выход которого соединен с другим входо.м блока сравнения, один из выходов которого соединен с запрещающим входом элемента «Запрет, четвертым входом блока точного позиционирования и одним из.входов одного из элементов И блока реверса, другой вход которого соединен с пятым выходом блока коррекции, а третий через схему задержки - с датчиком щаговых импульсов, а выход соединен с одним из входов элемента «Память, другой вход которого соединен с выходом элемента «Запрет блока реверса, запрещающий вход которого соединен с другим выходом блока точного позиционирования, а выход - с другим входом блока коррекции, с пятым входом блока точного позиционирования и с одними из входов второго и третьего элементов И, выходы которых соединены с одним из входов элементов ИЛИ, другие входы которых соединены с другими выходами блока сравнения, а выходы - с другими входами блока управления, отличающееся тем, что, с целью повышения точности отработки адреса в высотных складах, устройство снабжено дополнительным путевым датчиком, а блок реверса - дополнительными элементомИ и элементами «Память, причем путевые датчики установлены на подвижном объекте на расстоянии, равном ширине ячейки стеллажа склада и соединены каждый с одним из входов дополнительных элементов «Память и со входами дополнительного элемента И, выход которого соединен с другим входом элемента «Запрет блока реверса, а выход элемента «Запрет блока реверса дополнительно соединен с четвертым входом блока коррекций и с другими входами дополнительных элементов «Память, выход каждого из которых соединен с другими входами второго и третьего элементов И и с третьим вхЬдом другого Дополнительного элемента «Память. Источпики информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 368611, М.кл2. G 06 F 15/50, G 05 В 19/28, 16.03.70. 2.Заявка № 2393680/29-11, М. кл. В 65 G 47/46, 12.06.76, по которой принято решение о выдаче авторского свидетельства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство программного управления подвижным объектом | 1976 |
|
SU640926A1 |
| Устройство программного управления подвижным объектом | 1976 |
|
SU615011A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯШТАБЕЛЕРОМ | 1969 |
|
SU257577A1 |
| Устройство для адресования крана-штабелера складского стеллажа | 1984 |
|
SU1411223A1 |
| Устройство для управления краном-штабелером | 1988 |
|
SU1558822A1 |
| Устройство для адресования подвижного объекта | 1988 |
|
SU1558821A1 |
| Устройство для автоматического адресования транспортного средства | 1986 |
|
SU1388904A1 |
| Устройство для автоматического адресования транспортного средства | 1973 |
|
SU468562A1 |
| Устройство для управления координатным транспортным средством | 1990 |
|
SU1718234A1 |
| Устройство для автоматического адресования объекта | 1975 |
|
SU640915A1 |
