vj
ся
ON N
О СО
Изобретение относится к производству волокон, пряжи, нитей и предназначено для контроля технологических процессов в текстильной промышленности.
Известно устройство для контроля на- тяжения нитей, содержащее корпус, рычаг, щуп, соединенный с рычагом, преобразователь усилия.
Недостатками этого устройства являются зависимость показаний от ориентации устройства в пространстве, большая чувствительность к вибрации основания из-за несбалансированности рычага с крышкой вокруг оси вращения, значительная погрешность от нелинейности вследствие необходимости обеспечить ход рычага для воздействия на чувствительный элемент. Отмеченные недостатки приводят к сужению области использования известного устройства в текстильной промышленности.
Наиболее близким по технической сущности к предлагаемому является прибор для измерения .натяжения движущейся нити, содержащий корпус, соединенные с. ним два параллельных направляющих стержня и размещенный между ними на равных расстояниях измерительный стержень. Стержни снабжены нитепроводниками, измерительный стержень связан с корпусом с возможностью упругого поворота вокруг оси, перпендикулярной стержню, датчик перемещения измерительного стержня, усилитель постоянного тока, источник питания и индикатор.
Недостатками известного устройства являются, во-первых, значительная погреш- ность от нелинейности, появляющаяся из- за изменения угла охвата нитью измерительного стержня вследствие перемещения последнего под действием силы. Перемещение же стержня значительно из- за использования тензорезисторного датчика, для работы которого требуется обеспечить большие напряжения (10-20 кгс/мм2) в зоне размещения тензорезисто- ров. что и приводит к перемещениям конца стержня до нескольких миллиметров. Помимо изменения угла охвата нитью, есть еще одна причина нелинейности - большие перемещения конца измерительного стержня приводят к нелинейности его самого, как упругого тензометрического элемента. Вторая причина появления погрешности - зависимость показаний устройства от положения в пространстве вследствие не- сбалансированности измерительного стержня вокруг оси поворота. Поэтому необходимо ограничивать и нормировать изменение положения устройства в пространстве при градуировке и последующем
применении. Если при градуировке в лаборатории это требование выполнимо, хотя и с трудом, то при переходе из лаборатории о цех это можно сделать в редких случаях. Кроме того, недопустимы изменения ориентации известного устройства в пространстве в ходе эксплуатации, чтобы не сбить градуировку, а это практически невозможно в цеховых условиях. Общая погрешность, выз&анная этими двумя причинами, достигает десятков процентов, что ограничивает область применения устройства только контролем одного, раз и навсегда заданного, натяжения, а переход с одного значения контролируемого натяжения на другое или переход на другую машину требуют значительной переналадки и новой градуировки известного устройства.
Известное устройство также вносит вследствие несбалансированности измерительного стержня и его большого перемещения значительную ошибку, если на статическое натяжение накладывается динамическая составляющая, например, от вибрации опоры, что еще более сужает область использования прототипа.
Цель изобретения - повышение точности контроля натяжения.
Расширение области применения, т.е. обеспечение возможности контроля натяжения нитей на машинах многих типов, при различных уровнях натяжения нити, при различных ориентациях устройства в пространстве и при наличии вибрации основания, позволяет подходить к нити с устройством в случае стесненных пространств, что часто требуется при контроле в условиях реальной эксплуатации. Возможность контроля натяжения в динамике тлк- же расширяет область применения.так как дает возможность вести контроль при значительном дрожании руки оператора, держащего устройство за корпус, либо при вибрациях опоры, к которой крепится корпус устройства.
Поставленная цель достигается тем, что в устройство введены усилитель переменного тока, генератор, выпрямитель, аналого-цифровой преобразователь, уравновешивающий стержень и груз, усилитель постоянного тока выполнен с двумя входами, датчик перемещения выполнен в виде дросселя с разомкнутым П-образным сердечником, плоскость которого перпендикулярна общей плоскости направляющих стержней, и размещен в корпусе с возможностью перемещения и фиксации в направлении перемещения измерительного стержня так, что зазор между плоскостью полюсных наконечников П-образного сердечника и поверхностью измерительного стержня составляет 0,05-0,20 максимального размера поперечного сечения полюсного наконечника, уравновешивающий стержень жестко соединен с измерительным и расположен в корпусе по другую сторону от оси упругого поворота измерительного стержня, груз размещен на уравновешивающем стержне с возможностью перемещения вдоль него и фиксации, дроссель соединен с выходом генератора и с входом усилителя переменного тока, выход которого соединен с входом выпрямителя, выход выпрямителя соединен с входом усилителя постоянного тока, выход усилителя постоянного тока соединен с входом аналого- цифрового преобразователя, выход которого соединен с индикатором.
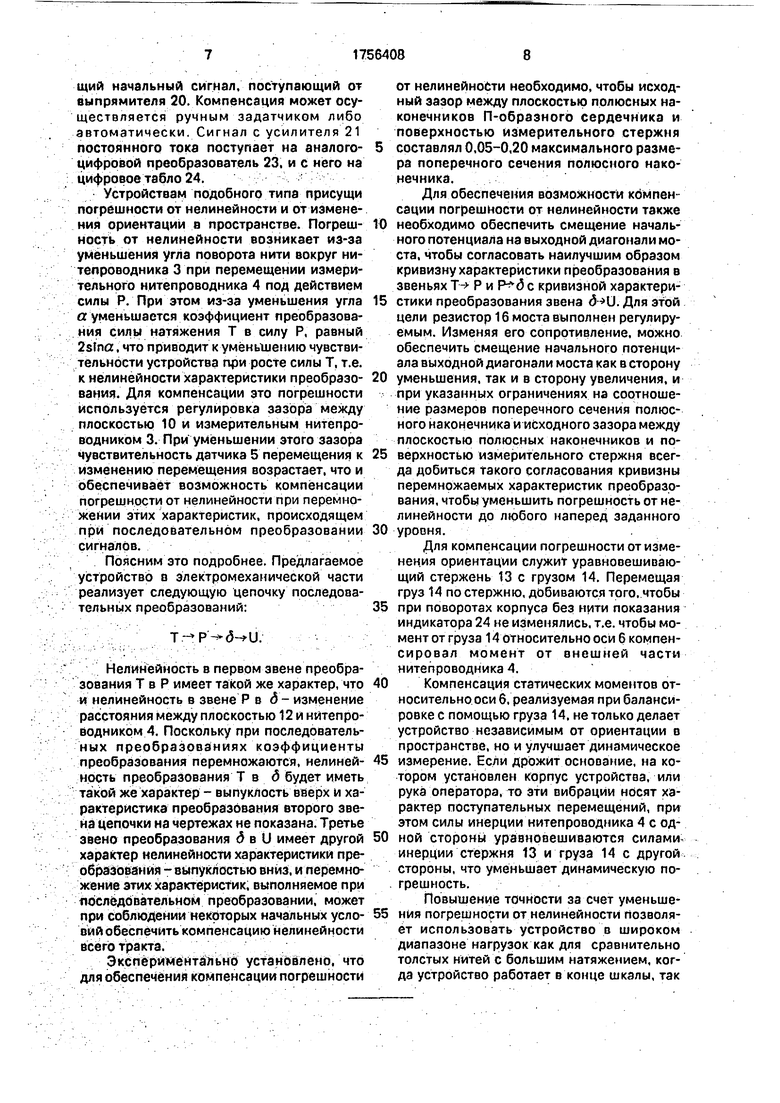
На фиг. 1 изображена структурная схема устройства; на фиг. 2 - общая электромеханическая схема устройства, разрез, вид сбоку; на фиг. 3 - схема проводки нити в нитепроводниках совместно со схемой сложения сил.
Устройство состоит из корпуса 1, с которым соединены два параллельных направляющих нигепроводиика 2 и 3 и размещенный параллельно между ними на равных расстояниях измерительный нитепроводник 4. Последний связан с корпусом 1 с возможностью упругого поворота вокруг оси 6 вращения. Возможность упругого поворота может быть обеспечена несколькими способами: обычный подшипник скольжения или шариковый на оси 6, пружина 7, соединяющая измерительный нитепровод- никЗ с корпусом 1 на некотором расстоянии от оси 6, либо введением торсионных пружин, соосных с осью 6, либо использование упругих элементов торсионного или изгиб- ного типа вместо оси 6 и т.д. Существенным в данном случае является лишь обеспечение вращения измерительного нитепроводника 4 вокруг оси G с возникновением при повороте упругого реактивного момента сопротивления. Перемещение измерительного нитепроводника А под действием нагрузки Р преобразуется в электрический сигнал датчиком 5 перемещения, выполненным в виде мостовой схемы, в одном из плеч вклю- иен дроссель 8 с разомкнутым П-образным сердечником 9 и обмоткой 10. Плоскость П-образного сердечника 3 перпендикулярна общей плоскости нитепроводников 2-4. Сердечник 9 размещен в корпусе 1 с возможностью перемещения в направлении, перпендикулярном нитепроводнику,3 и фиксации в выбранном напоавлении (на фиг, 2 п направлении вверх-вниз) с помощью, например, винтов 11, что позволяет
регулировать начальный зазор60 между плоскостью 12 полюсных наконечников сердечника 9 и измерительным нитепроводником 3. Нитепроводник 4 может быть выполнен
из ферромагнитного материала, например стали, если же по соображениям уменьшения веса его выполняют из легких немагнит- ных сплавов, то в зоне размещения сердечника 9 к нитепроводнику А можно
прикрепить пластинку из ферромагнитного сплава (не показана). Внутри корпуса к измерительному нитеп,-воднику 4 жестко прикреплен уравновешивающий стержень 13, на котором размещен уравновешивающий груз 14 с возможностью перемещения вдоль стержни и фиксации на нем при регулировке устройства. Резистор 15, регулируемый резистор 16, дроссель 8 и дополнительный дроссель 17 образуют мостовую схему, питаемую генератором 18. С выходной диагонали мостовой схемы сигнал поступает на вход усилителя 19 переменного тока, с выхода усилителя сигнал поступает на выпрямитель 20, Выпрямительный
сигнал поступает на первый вход усилителя 21 постоянного тока, на второй вход усилителя 21 подается сигнал от блока 22 установки нуля. Сигнал с усилителя 21 постоянного тока подается на аналогоцифровой преобразователь 23 и с него на цифровое табло-индикатор 24. Все электрические елементы устройства, включая батарейный источник питания (не показан), размещены в корпусе 1..
Нить 25 пропущена с изломом, соответ- ствующим углу а ее поворота при проходе через нитепроводники 2. Этот угол задается начальным расположением нитепроводников 2 и 3.
Устройство работает следующим образом.
Натяжение Т нити 25 вызывает в соответствии с правилом параллелограмма сложения сил появление силы Р, действующей
на измерительный нитепроводник 4 и приводящей к его перемещению так, что зазор между плоскостью 12 и поверхностью нитепроводника 4 уменьшается. Это приводит к изменению индуктивного сопротивления
дросселя 18 датчика 5 перемещения и к изменению выходного сигнала усилителя 19 переменного тока, сигнал которого выпрямляется выпрямителем 20 и поступает на усилитель 21 постоянного тока. При отсутствии
нити в нитепроводниках 3 и 4 на входе усилителя постоянного тока может быть начальный сигнал, который нужно скомпенсировать. Эту задачу решает блок 22 установки нуля, который вырабатывает сигнал, компенсирующий начальный сигнал, поступающий от выпрямителя 20. Компенсация может осуществляется ручным задатчиком либо автоматически. Сигнал с усилителя 21 постоянного тока поступает на аналого- цифровой преобразователь 23, и с него на цифровое табло 24.
Устройствам подобного типа присущи погрешности от нелинейности и от изменения ориентации в пространстве. Погрешность от нелинейности возникает из-за уменьшения угла поворота нити вокруг ни- тепроводника 3 при перемещении измерительного нитепроводника 4 под действием силы Р. При этом из-за уменьшения угла а уменьшается коэффициент преобразования силы натяжения Т в силу Р, равный 2slna, что приводит к уменьшению чувствительности устройства при росте силы Т, т.е. к нелинейности характеристики преобразования. Для компенсации это погрешности используется регулировка зазора между плоскостью 10 и измерительным нитепроводником 3. При уменьшении этого зазора чувствительность датчика 5 перемещения к изменению перемещения возрастает, что и обеспечивает возможность компенсации погрешности от нелинейности при перемножении этих характеристик, происходящем при последовательном преобразовании сигналов.
Поясним это подробнее. Предлагаемое устройство в электромеханической части реализует следующую цепочку последовательных преобразований:
.
Нелинейность в первом звене преобразования Т в Р имеет такой же характер, что и нелинейность в звене Р в д- изменение расстояния между плоскостью 12 и нитепро- водником 4. Поскольку при последовательных преобразованиях коэффициенты преобразования перемножаются, нелинейность преобразования Т в б будет иметь такой же характер - выпуклость вверх и характеристика преобразования второго звена цепочки на чертежах не показана. Третье звено преобразования д в U имеет другой характер нелинейности характеристики преобразования - выпуклостью вниз, и перемножение этих характеристик, выполняемое при последовательном преобразовании, может при соблюдении некоторых начальных условий обеспечить компенсацию нелинейности всего тракта.
Экспериментально установлено, что для обеспечения компенсации погрешности
от нелинейности необходимо, чтобы исходный зазор между плоскостью полюсных наконечников П-образного сердечника и поверхностью измерительного стержня
составлял 0,05-0,20 максимального размера поперечного сечения полюсного наконечника.
Для обеспечения возможности компенсации погрешности от нелинейности также
необходимо обеспечить смещение начального потенциала на выходной диагонали моста, чтобы согласовать наилучшим образом кривизну характеристики преобразования в звеньях Т Р и с кривизной характеристики преобразования звена . Для этой цели резистор 16 моста выполнен регулируемым. Изменяя его сопротивление, можно обеспечить смещение начального потенциала выходной диагонали моста как в сторону
уменьшения, так и в сторону увеличения, и при указанных ограничениях на соотношение размеров поперечного сечения полюсного наконечника и исходного зазора между плоскостью полюсных наконечников и поверхностью измерительного стержня всегда добиться такого согласования кривизны перемножаемых характеристик преобразования, чтобы уменьшить погрешность от нелинейности до любого наперед заданного
уровня.
Для компенсации погрешности от изменения ориентации служит уравновешивающий стержень 13 с грузом 14. Перемещая груз 14 по стержню, добиваются того, чтобы
при поворотах корпуса без нити показания индикатора 24 не изменялись, т.е. чтобы момент от груза 14 относительно оси 6 компенсировал момент от внешней части нитепроводника 4.
Компенсация статических моментов относительно оси б, реализуемая при балансировке с помощью груза 14, не только делает устройство независимым от ориентации в пространстве, но и улучшает динамическое
измерение. Если дрожит основание, на котором установлен корпус устройства, или рука оператора, то эти вибрации носят характер поступательных перемещений, при этом силы инерции нитепроводника 4 с одной стороны уравновешиваются силами- инерции стержня 13 и груза 14 с другой стороны, что уменьшает динамическую погрешность.
Повышение точности за счет уменьшения погрешности от нелинейности позволяет использовать устройство в широком диапазоне нагрузок как для сравнительно толстых нитей с большим натяжением, когда устройство работает в конце шкалы, так
и для сравнительно тонких нитей с милым натяжением, когда устройство работает в начале шкалы. Это существенно расширяет область применений устройства. Уменьшение погрешности от изменения ориентации и от динамического воздействия позволяет использовать устройство для измерения на вибрирующих, т.е. работающих в эксплуатационных режимах, машинах, причем точность практически такая же, как и при измерениях на неподвижных нитях, и измерять натяжение в труднодоступных местах, когда для подхода к нити необходимо изменять ориентацию устройства в пространстве. Это также существенно расширяет область применения устройства,
Формула изобретения Устройство для контроля натяжения движущейся нити, содержащее корпус с двумя параллельными направляющими ни- тепроводниками и размещенным параллельно между ними на равных расстояниях измерительным нитепроводником. установленным с возможностью упругого поворота вокруг оси. перпендикулярной нитепровод- никам, датчик перемещения измерительного нитепроводника. усилитель постоянного тока, индикатор, отличающееся тем, что. с целью повышения точности контроля натяжения, оно содержит генератор, выпрямитель, блок установки нуля, усилитель переменного тока, аналого-цифровой преобразователь, уравновешивающий стержень и груз, датчик перемещения измерительного
нитепроводника выполнен в виде мостовой схемы с установленным в одном из плеч дросселем с разомкнутым П-образным сердечником, плоскость которого перпендикулярна общей плоскости направляющих
нитепроводников. размещенным в корпусе с возможностью перемещения измерительного нитепроводника так. что зазор между плоскостью полюсных наконечников П-об- рззного сердечника и поверхностью измерительного нитепроводника составляет 0.05-0,2 максимального размера поперечного сечения полюсного наконечника, уравновешивающий стержень расположен в корпусе по другую сторону от оси упругого
поворота измерительного нитепроводника, жестко с ним связанного, груз размещен на уравновешивающем стержне с возможностью перемещения вдоль него и фиксации, генератор выходом соединен с мостовой
схемой, в диагональ которой включен усилитель переменного тока, связанный через последовательно соединенные выпрямитель, усилитель постоянного тока, аналого-цифровой преобразователь с индикатором, а
блок установки нуля подключен к второму входу усилителя постоянного тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик наклона и вибрации | 2019 |
|
RU2707583C1 |
| Электромагнитные весы | 1986 |
|
SU1337671A1 |
| Способ динамического гашения колебаний корпуса вибростенда | 2023 |
|
RU2827752C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ОБСАДНЫХ КОЛОНН | 2009 |
|
RU2401383C1 |
| Измерительная головка | 1986 |
|
SU1409866A1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1994 |
|
RU2126161C1 |
| Уровнемер | 1987 |
|
SU1520349A1 |
| Электромагнитный прибор с поляризующим подмагничиванием | 1982 |
|
SU1791783A1 |
| Устройство для определения фрикционных свойств нитей | 1989 |
|
SU1730584A1 |
| Устройство для измерения натяжения движущейся нити | 1985 |
|
SU1388734A1 |
Изобретение относится к производству волокон, пряжи и нитей а текстильной промышленности и предназначено для контроля натяжения нитей, волокон, пряжи и других изделий. Устройство содержит корпус 1, нитепроводники 2-4, датчик перемещения 5, дроссели 8 и 17, генератор 18, усилитель 19 переменного тока, выпрямитель 20, усилитель постоянного тока 21 с блоком 22 установки 0, аналого-цифровой преобразователь 23, цифровой индикатор. Датчик перемещения измерительного ни- тепроводника выполнен в виде мостовой схемы с установленным в одном из плеч дросселя разомкнутым П-образным сердечником, плоскость которого перпендикулярна общей плоскости направляющих нитепрооодников и который размещен в корпусе с возможностью перемещения измерительного нитепроводника. Зазор между плоскостью полюсных наконечников П-образного сердечника и поверхностью измерительного нитепроводника составляет 0,05-0,2 максимального размера поперечного сечения полюсного наконечника. Груз размещен на уравновешивающем стержне с возможностью перемещения вдоль него и фиксации. 3 ил. Ю (Л С
| Устройство для контроля натяжения нити | 1979 |
|
SU874783A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Прибор для измерения натяжениядВижущЕйСя НиТи HA ТЕКСТильНОй МАшиНЕ | 1979 |
|
SU848489A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
