Изобретение относится к средствам стационарных испытаний и обкатки колесных транспортных средств - роликовым инерционным тормозным и испытательным стендам, и является усовершенствованием стенда по авт.св. № 1682854.
Цель изобретения - расширение функциональных возможностей, увеличение нагрузочной способности стенда и защита от буксования транспортного средства на роликах стенда,
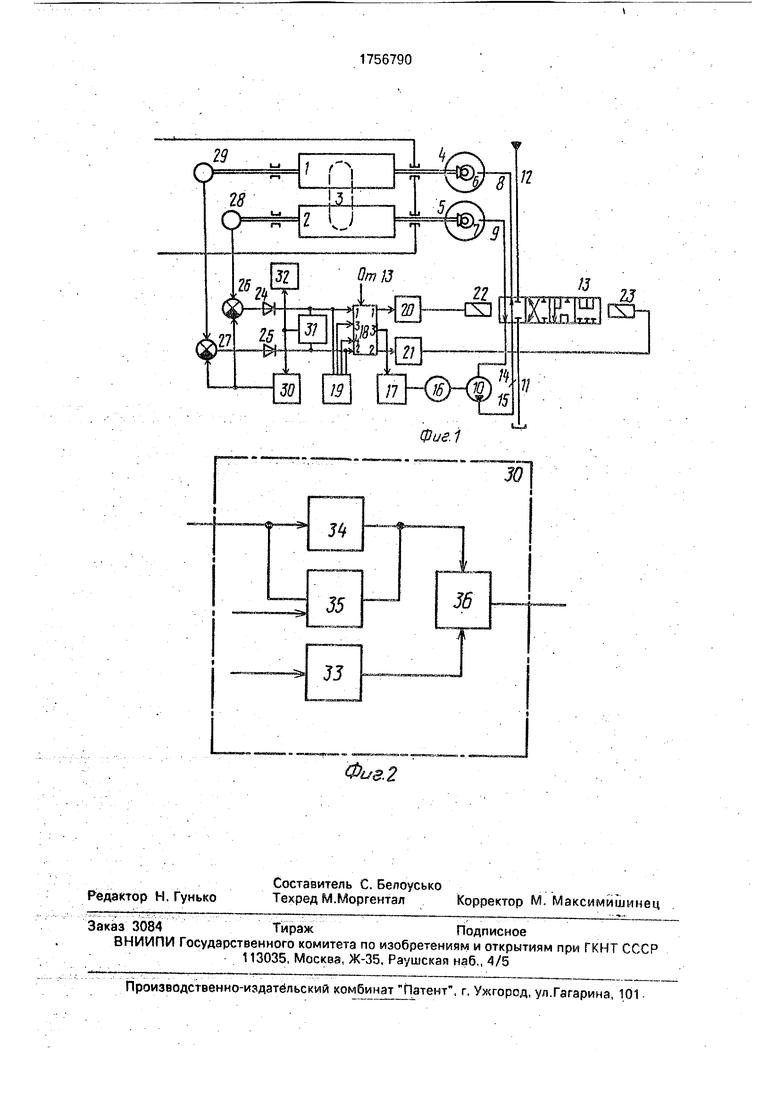
На фиг,1 изображена схема стенда, точнее той его части, которая связана с одним из активных колес испытуемого транспортного средства; на фиг.2 - функциональная схема блока задания,
Два опорных ролика 1 и 2, на которые опирается колесо 3 испытуемой машины, связаны с маховиками 4 и 5 переменной массы, представляющими собой полые емкости, наполняемые жидкостью, укрепленные вертикально на осях, связанных с валами роликов 1 и 2 коническими передачами 6 и 7. Маховики 4 и 5 соединены посредством магистралей 8 и 9 между собой, а также с гидронасосом 10, сливной 1t, напорной 12 гидролиниями посредством управляемого электрогидравлического распределителя 13 -четырехходового шестилияейного распределителя. С первой линией распределителя соединена всасывающая 14, с второй - напорная 15 линии гидронасоса, с третьей - сливная 11, с шестой - напорная 12 гидролинии подачи жесткости, с четвертой - магистраль 9 маховика 5, с пятой - магистраль 8 маховика 4. В первой позиции распределителя первая линия связана с четвертой, вторая - с пятой, во второй позиции первая линия связана с пятой, вторая - с четвертой, в третьей позиции четвертая линия связана с пятой и с первой, а вторая - с третьей, в
XI
сл о. XI ю
ю
четвертой позиции четвертая линия связана с пятой и шестой линиями.
Гидронасос 10 соединен с электродвигателем 16, имеющим устройство 17 включения, связанное с третьим выходом четырехвходового логического блока 18, с входами которого связаны выходы блока 19 управления, а с другими выходами связаны блоки 20 и 21 включения электромагнитов 22 и 23 управления распределителем 13. Логический блок 18 посредством диодов 24 и 25 связан с блоками 26 и 27 сравнения, первые входы которых соединены с датчиками 28 и 29 скорости скольжения роликов 1 и 2 относительно колеса 3, а вторые - с выходом блока 30 задания. Последний выполнен с коэффициентом передачи, величина которого регулируется сигналом на управляющем входе: при нулевом сигнале величина коэффициента равна выставленному при настройке значению, соответствующему граничной величине скольжения колеса 3 по каткам 1 и 2, а при появлении сигнала 1 коэффициент передачи увеличивается. Управляющий вход блока 30 связан с выходами блока И 31, входы которого соединены со входами логического блока 18, соединенными с диодами 24 и 25. Выход блока 31 соединен также с регистрирующим устройством 32, При исчезновении сигнала на управляющем входе блока 30 коэффициент его передачи остается на достигнутом уровне.
Регистрирующее устройство 32 в простейшем случае представляет собой сигнальную лампу с релейным устройством включения, в более сложном исполнении - микропроцессорное устройство.
Блок 30 задания (фиг.2) включает линейный преобразователь 33, блок 34 интегрирования, блок 35 сброса и суммирующий блок 36. Блоки 33 и 35 связаны с пультом настройки (не показан), а блок 34 своим управляющим входом - с выходом блока 31.
Исходный сигнал задания настраивается оператором стенда на блоке 33 и поступает на выход блока 30 через суммирующий блок 36. При появлении управляющего сигнала к этому выходному сигналу прибавляется сигнал выхода блока 34. При желании вернуть блок 33 к исходному состоянию оператор, воздействуя на блок 35 сброса, сбрасывает сигнал блока 34 до нуля, и сигнал на выходе блока 30 становится вновь равным сигналу блока 33.
Исполнение блока 30 может быть любым: электронным, на операционных блоках, электромагнитным, на потенциометрах, поворотных трансформаторах и электродвигателе, и т.п.
Распределитель 13 снабжен датчиками (не показаны) его позиции. Ими могут быть индикаторы, блок-контакты, сенсоры любого рода. Эти датчики связаны с блоком 18,
реализующим логическую функцию: Yi XiZi + X2(Zi + Z2) + X3Z4; Y2 « X2Zi + Хз (Zi + Z2) + X4Z4,- Y3 Xi + X2 + X3, где Zi Z2 + 2з + ZA;
0 Xi - сигналы на t-x входах блока; Yj - сигналы на j-x выходах; ZK - сигналы положения распределителя 13 в К-й позиции.
Логический блок 18 при поступлении на
5 первый вход сигнала с диода 24 или с блока 19 выдает сигнал на включение двигателя 16 и сигнал на перемещение распределителя 13 в первую позицию, если он находится в другой позиции. При поступлении сигнала
0 на второй вход от диода 25 или блока 19 выдаются сигналы на включение двигателя 16 и перемещение распределителя 13 во вторую позицию. При поступлении на третий вход блока 18 сигнала от блока 19 выда5 ются сигналы на включение двигателя 16 и перемещение распределителя 13 в третью позицию. При поступлении на четвертый вход сигнала с блока 19 выдается сигнал на перемещение распределителя 13 в четвер0 тую позицию.
Стенд работает следующим образом. Испытуемое транспортное средство (не показано) въезжает на стенд и устанавливается на нем так, что каждое его активное
5 колесо 3 опирается на пару роликов 1 и 2. По сигналу оператора, поступающему в систему управления нагрузкой стенда через блок 19 управлений, происходит (в случае необходимости) корректировка момента
0 инерции маховиков в соответствии с массой машины. В зависимости от состояния маховиков 4 и 5 их емкости можно долить или из них слить лишнюю жидкость, соответственно увеличивая или уменьшая их момент
5 инерции, В первом случае сигнал с блока 19 подается на четвертый вход блока 18, распределитель 13 переходит в четвертую позицию, магистрали 8 и 9 обоих маховиков 4 и 5 соединяются с напорной гидролинией 12
0 и маховики заполняются жидкостью. Во втором случае распределитель 13 аналогичным образом переходит в третью позицию, магистрали 8 и 9 соединяются со сливной гидро- линией 11 посредством насоса 10,
5 включается двигатель 16 привода насоса 10 и жидкость из маховиков 4 и 5 откачивается. При необходимости перераспределить суммарный момент инерции пары маховиков 1 и 2 между ними сигнал с блока 19 подается на первый или второй входы блока 18. распределитель 13 переходит в первую или вторую позицию, магистрали 8 и 9 соединяются между собой посредством насоса 10, вклю- чается двигатель 1 б и жидкость перекачивается из маховика 4 в махоаик 5 (первая 5 позиция распределителя 13} или из маховика 5 в маховик б (вторая).
После начальной корректировки момента инерции начинается разгон испытуемой машины на стенде своим двигателем или 10 приводным электродвигателем стенда (не показан), а затем торможение машины и связанных с роликами маховиков. При больших тормозных усилиях (или разгонных в режиме разгона) коэффициент сцепления 15 колеса 3 с одним из опорных роликов, например с роликом 1, может значительно вырасти, и скорость проскальзывания этого ролика 1 относительно колеса 3 может стать выше величины, заранее набранной в блоке 20 30 задания. В этом случае ранее запертый диод 25 откроется и сигнал превышения сигнала датчика 29 над задающим сигналом поступит с блока 27 сравнения на второй вход блока 18, в результате чего распреде- 25 литель 13 перейдет во вторую позицию, включится двигатель 16, и насос 10 начнет перекачивать жидкость из маховика 4 в маховик 5, снижая тем самым момент инерции первого и увеличивая второго при неизмен- 30 ной их сумме. Касательные силы в точках контакта колеса 3 с роликами 1 и 2 изменяются пропорционально моментам инерции, кольжение ролика 1 снизится. Процесс перекачки прекратится, когда величина сколь- 35 жения станет меньше заданной.
При еще больших нагрузках избыточное проскальзывание может наступить на роликах 1 и 2 одновременно. На выходе обоих иодов 24 и 25 появятся сигналы, в резуль- 40 ате чего на выходе блока И 31 сигнал 0я сменится на 1, и коэффициент передачи блока 30 начнет увеличиваться, начнет увеличиваться сигнал на его выходе, поступающий на входы блоков 27 и 26. В какой-то 45 момент этот сигнал сравняется с одним из сигналов, поступающих на другие входы блоков 26 и 27, один из диодов 24 или 25 на выходе этого блока закроется и на выходе блока 31 сигнал Г сменится на О. Рост 50 коэффициента передачи блока 30 прекратится, и сигнал с другого из диодов 24 и 25 поступит на соответствующий вход блока 18, что вызовет дальнейшую перекачку жидкости и взаимное изменение массы маховиков до прекращения избыточного скольжения, но уже при большей величине допустимого значения скольжения.
Одновременно сигнал с блока 31 поступает на блок 32, сигнальная лампа загорается и оператор осведомляется о наступлении запредельного режима при испытаниях. Она также сигнализирует об изменении коэффициента передачи блока 30, что позволит оператору знать об изменении настройки блока 30 и либо вернуть его в исходное положе ние, либо перенастроить для последующих испытаний. При процессорном управлении стендом величины моментов инерции могут быть запомнены и воспроизведены для каждого нового типа транспортных средств и скорректированы по величине проскальзывания роликов относительно колес, а фиксация запредельного режима дает дополнительную информацию о состоянии испытуемой машины, что расширяет функциональные возможности стенда.
Формула изобретения
1.Стенд для испытания транспортных средств по авт. св. № 1682854. отличающийся тем. что, с целью расширения функциональных возможностей, увеличения нагрузочной способности и защиты от буксования транспортного средства на роликах стенда, стенд дополнительно снабжен блоком И и регистрирующим устройством, а блок задания выполнен с регулируемым коэффициентом передачи, причем входы блока И связаны с входами логического блока, а выход - с управляющим входом блока задания и регистрирующим устройством.
2.Стенд по п.1, отличающийся тем, что он оборудован пультом настройки, а блок задания содержит блок суммирования и связанные с ним линейный преобразователь и блок интегрирования, шунтированный управляемым блоком сброса, причем линейный преобразователь и блок сброса связаны с пультом настройки стенда.
0
/ Г4,
П
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обкатки и испытаний колесных транспортных средств на инерционном стенде со сдвоенными опорными беговыми барабанами и инерционный стенд для его осуществления | 1988 |
|
SU1712809A1 |
| Испытательный катковый стенд | 1990 |
|
SU1795335A1 |
| Стенд для испытания транспортных средств | 1990 |
|
SU1753328A1 |
| Испытательный катковый стенд | 1990 |
|
SU1795334A2 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| Стенд для испытания транспортных средств | 1988 |
|
SU1557468A1 |
| Стенд для испытания системы управления торможением колес транспортного средства | 1983 |
|
SU1152837A1 |
| Стенд для испытаний системы управления торможением колес транспортного средства | 1983 |
|
SU1122533A1 |
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ ЛЕТАТЕЛЬНОГО МИКРОАППАРАТА (ЛМА) С ИНТЕГРАЛЬНОЙ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ (ИБИНС) И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263283C1 |
| Стенд для испытаний системы управления торможением колес транспортного средства | 1979 |
|
SU867733A2 |
Изобретение относится к средствам испытаний, в частности к стационарным испытательным роликовым стендам с инерционными массами и спаренными опорными роликами для обкатки и-тормозных испытаний транспортных средств. Целью изобретения является расширение функциональных возможностей, увеличение нагрузочной способности и защита от буксования транспортного средства на роликах стенда. Цель достигается включением блока И и регистрирующего устройства и выполнением блока задания с регулируемым коэффициентом передачи. 1 з.п.ф-лы, 2 ил.
да l#
Г
LA
/J
Тв7 7ТГТ1
ЦТ
2J
iHLJJ-W
/7
7/
JO
| Стенд для транспортных средств | 1989 |
|
SU1682854A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ приготовления консистентных мазей | 1919 |
|
SU1990A1 |
