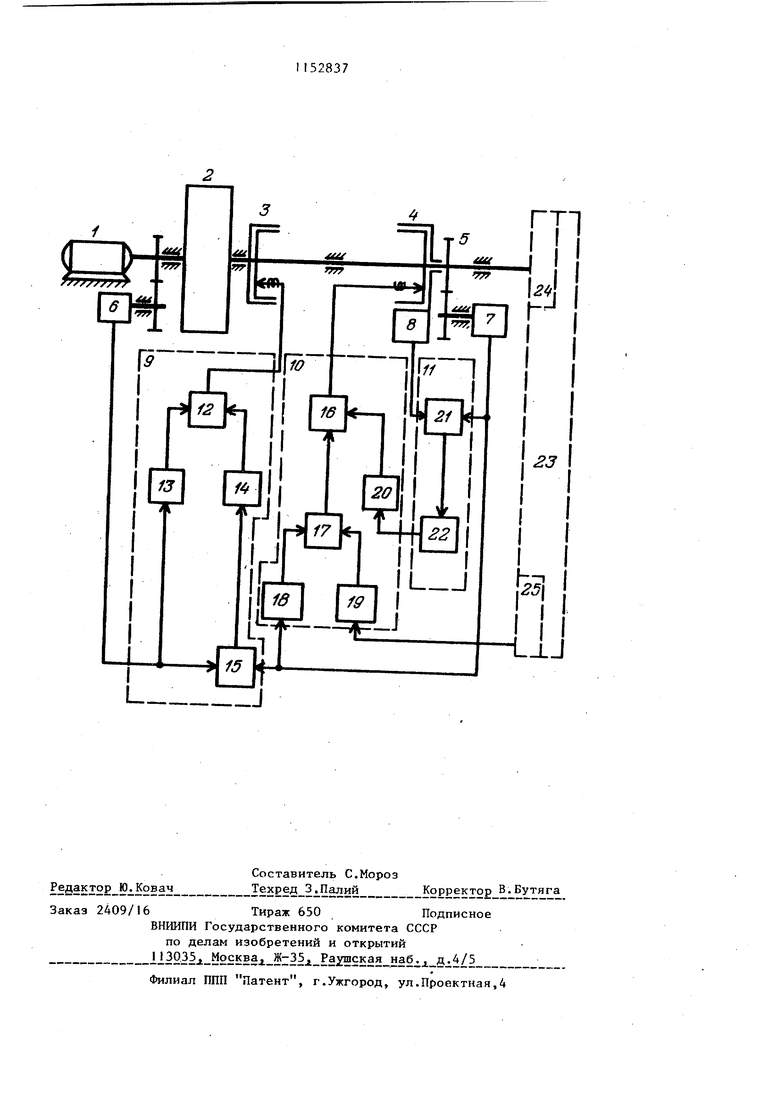
Изобретение относится к машиностроению, в частности к испытаниям транспортных средств, и может быть использовано в авиационной промышле ности и автомобилестроении при иссл дованиях, испытаниях и доводке сист управления торможением колес и анти блокировочньтх устройств летательных аппаратов и автомобилей. Наиболее близким к предлагаемому является стенд для испытания системы управления торможением колес тра спортного средства, содержащий связанные между собой трансмиссией маховик-имитатор кинетической энергии и скорости транспортного средства, муфту-имитатор момента сцепления колеса с дорогой, имитатор колеса, муфту-имитатор тормозного момента, первый такогенератор. механически связанный с маховиком-имитатором, второй тахогенератор, механически связанный с имитатором колеса, и датчик момента, механически связанный с муфтой-имитатором тормозного момента, блок вычисления момента сцепления, состоявший из узла умножения, двух функциональных преобразователей, выходы которых подключен к входам узла умножения, и узла де ления, вход делителя которого подключен к первому тахогенератору,вхо делимого - к второму тахогенератору а выход - к входу одного функционального преобразователя,причем вход второго функционального преобразова теля подключен к первому тахогенера трру, а выход узла умножения - к обмотке управления муфты-имитатора момента сцепления, блок вычисления тормозного момента, состоящий из первого узла умножения, выход котор го подключен к обмотке управления муфпгы-имитатора тормозного момента, второго узла умножения, выход которого подключен к одному входу перво го узла умножения, и трех функциональных преобразователей, причем выходы первого и второго функциональных преобразователей подключены к входам второго узла умножения, вы ход третьего - к второму входу первого узла умножения, вход первого к второму тахогеиератору, а вход вт рого - к тормозу испытуемой системы и блок вычисления температуры тормоза, состоящий из узла умножения, один вход которого подключен к дат7 чику момента, а другой - к второму тахогенератору, и интегратора, вход которого подключен к выходу узла умножения, а выход - к входу третьего функционального преобразователя блока вычисления тормозного момента В известном стенде тормозной момент является функцией давления, температуры и скорости транспортного средства. Скорость скольжения фрикционной пары, воспроизводимая блоком вычисления тормозного момента, пропорциональна скорости транспортного средства только при безюзовых режимах тормозного пробега при близких скоростях вращения тормозного и нетормсзного колес. Пробег же при малом коэффициенте сцепления сопровождается работой антиюзовой автоматики и значительной (до 50%) разницей в скоростях вращения тормозного и нетормозного колес. Причем скорость вращения тормозного колеса зависит от эффективности работ испытуемой тормозной системы и заранее неизвестна, а следовательно, воспроизводимый тормозной момент не связан функциональной зависимостью со скоростью нетормозного колеса (эквивалентной скорости транспортного средства). Погрещность такого расчета дает завышение тормозного момента особенно на режимах моделирования слабого сцепления колеса с дорогой), на 10-20%, что соответствует сокращению длины и времени тормозного пробега на 5-10%. Цель изобретения - повышение точности стендовых испытаний и достоверности их результатов. Указанная цель достигается тем, что в стенде . содержащем связанные между собой трансмиссией маховикимитатор кинетической энергии и скорости транспортного средства, муфтуимитатор момента сцепления колеса с дорогой, имитатор колеса, муфту-имитатор тормозного момента, первый тахогенератор, механически связанный с маховиком-имитатором, второй тахогенератор, механически связанный с имитатором колеса, и датчик момента, механически связанный с муфтойимитатором тормозного момента, блок вычисления момента сцепления, состоящий из узла умножения, двух функциональных преобразователей, выходы которых подключены к входам узла умножения, и узла деления, вход делителя которого подключен к первому тахогенератору, вход делимого - к второму тахогенератору, а выход к входу одного функционального преобразователя, причем вход второго функционального преобразователя под ключен к первому тахогенератору, а выход узла умножения - к обмотке управления муфты-имитатора, момента сцепления, блок вычисления тормозно момента, состоящий из первого узла умножения, выход которого подключен к обмотке управления муфты-имитатор тормозного момента, второго узла ум ножения, выход которого подключен к одному входу первого узла умножения, и трех функциональных преобраз вателей, причем выхода первого и второго функциональных преобразоват лей подключены к входам второго узл умножения, выход третьего - к второму входу первого узла умножения, вход второго - к тормозу испытуемой системы, и блок вычисления температ ры тормоза, состоящий из узла умножения, один вход которого подключен к датчику момента, а другой - к второму тахогенератору, и интегратора, вход которого подключен к выходу узла умножения, а выход - к входу третьего функционального преобразова теля блока вычисления тормозного момента, вхрд первого функционального преобразователя блока вычисления тор мозного момента подключен к второму тахогенератору. На чертеже представлена структурная схема стенда для испытания систе мы управления торможением колес тран спортного средства. Стенд содержит связанные между со бой трансмиссией двигатель 1 раскрут ки, маховик-имитатор 2 кинетической энергии и скорости, муфту-имитатор 3 момента сцепления колеса с дорогой, муфту-имитатор 4 тормозного момента имитатор 5 колеса, два тахогенератора 6 и 7, первый из которых механически например, через редуктор свя зан с маховиком, а второй - с имитат ром 5 колеса, и датчик 8 тормозного момента (например, тензодатчикЬ В качестве муфт-имитаторов могут быть использованы, например, электромагнитные порошковые муфты. В состав стенда входят также три блоки 9-11 вычисления соответственно момента сцепления, тормозного момента и температуры тормоза. Блок 9 состоит из узла 12 умножения-, двух функциональных преобразователей ГФП1 13 и 14, выходы которых подключены к входам узла 12, и узла 15 деления, вход делителя которого подключен к тахогенератору 7, а вход - к ФП 14. Блок 10 состоит из двух узлов 16 и 17 умножения и трех функциональных преобразователей 18 - 20. Причем выходы ФП 18 и ФП 19 подключены к входам узла 17. а выходы узла 17 и ФП 20 к входам узла 16. Блок II состоит из узла 21 умножения и интегратора 22. причем входы узла 21 подключены к датчику 8 и тахогенератору 7, а выход - к входу интегратора 22, выход которого подключен к входу ФП 20 блока 10. Кроме того, вход ФП 13 подключен к тахогенератору 6, вход ФП 18 - к тахогенератору 7, а выходы узлов 12 и 16 - к обмоткам управления соответственно муфт 3 и 4. Все перечисленные функциональные преобразователи и узлы могут быть реа лизованы, например, типовыми включениями стандартных операционных усилителей, блоков нелинейностей и блоков умножения, входящих в состав аналоговой вычислительной машины, например МН-10. На чертеже также показана испытуемая система 23 с датчиком 24 частоты вращения колеса, механически связанным с имитатором 5 колеса, и датчиком 25 давления в тормозе колеса испытуемой системы, подключенным к входу ФП 19. Перед началом испытаний в функциональные преобразователи вводятся (например , методом кусочно-линейной аппроксимации) нормированные по максимальному значению функииональные зависимости момента сцеапения от скорости (в ФП 13) и скольжения (в ФП 14/ ,а также тормозного момента от скорости (в ФП 18), давления в тормозе ( в ФП 19) и температуры тормоза (в ФП 20). В узлы 12 и 16 умножения вводятся коэффициенты моделирования моментов, а в узел 21 умножения - коэффициент нормирования мощности тормоза. В интеграторе 22 устанавливается коэффициент передачи, обратно пропорциональный произведению массы фрикционных элементов в тормозе на их удельную теплоемкость. Двигатель
5Л
разгоняет маховик-имитатор 2 и имитатор 5. колеса до заданного значения угловой скорости.
Процесс испытаний начинается с включения тормозной системы 23. В тормозе системы возрастает давление, которое через датчик 25 воздействует на ФП 19. В ФП 19 формируется сигнал, который перемножается в узле 17 умножения с сигналом от преобразователя ФП 18, зависящим от скорости имитатора 5 колеса, измеряемой тахогенератором 7. .Полученное в узле 17 произведение умножается в узле 16 на сигнал с ФП 20, за;висящий от начальной температуры тормоза. Выходной сигнал с блока 10, пропорциональный заданному значению тормозного момента,в1оздействует на муфту - имитатор 4, создавая в ней тормозной момент, измеряемый датчиком 8. Тормозной момент приводит к изменению скорости вращения имитатора 5 колеса, которая измеряется датчиком 7. Сигналы с датчиков 7 и 8 поступают на блок 11, перемножаются в узле 21, выходной сигнал которого пропорционален мгновенной мощности тормоза. Этот сигнал, пройдя имитатор 22, преобразуется в текущее значение температуры тормоза, что вызывает изменение сигнала на выходе ФП 20. Кроме того, сигнал с датчика .7 изменяет выходную величину и ФП 18. Таким образом в блоке 10 при неизменном давлении постоянно корректируется заданное значение тормозного момента по скорости скольжения фрикционных пар тормоза и его средне массовой температуре. По мере замедления вращения имитатора 5 колеса тормозным моментом в блоке 9
37
формируется сигнал, пропорциональньй заданному значению момента сцепления, реализуемого муфтой-имитатором 3. Если предельное значение момента сцепления превышает тормозной момент, то в стенде при некотором скольжении имитатора 5 колеса относительно маховика 2 установится динамическое равновесие. Если тормозной
момент окажется больше предельного
момента сцепления (мокрая, обледенелая дорога), то замедление имитатора 5 колеса будет прогрессивно нарастать. Это вызовет реакцию антиюзовой автоматики испытуемой системы 23, которая сбросит давление в тормозе, что приведет к уменьшению сигнала с блока 10 и раскрутке имитатора 5 колеса до скорости маховика. По мере
раскрутки имитатора колеса преобразователь ФП 18 будет обеспечивать коррекцию тормозного момента, знак которой будет противоположен знаку коррекции при замедлении имитатора 5 колеса.
Предлагаемый стенд обеспечивает коррекцию значения тормозного момента по скорости скольжения трущихся фрикционный пар тормоза (пропорционапьной скорости вращения колеса) , что дает повышение точности моделирования на 10-20%. Причем большее повьшение точности соответству ет худшим условиям сцепления и характерно для относительного скольжения тормозного колеса более 40%.
Большая точность моделирования тормозного момента позволяет на 5-10% повысить точность определения
длины и времени тормозного пробега и точность стендовых испытаний.
|г«
:
|
| название | год | авторы | номер документа |
|---|---|---|---|
| Стенд для испытаний системы управления торможением колес транспортного средства | 1983 |
|
SU1122533A1 |
| Стенд для испытаний систем управления торможением колес транспортных средств | 1980 |
|
SU935353A1 |
| Стенд для испытаний системы управления торможением колес транспортного средства | 1981 |
|
SU975478A2 |
| Стенд для испытаний системы управления торможением колес транспортного средства | 1979 |
|
SU867733A2 |
| Стенд для испытаний системы управления торможением колес транспортного средства | 1978 |
|
SU776945A2 |
| Стенд для испытаний системы управления торможением колес транспортного средства | 1979 |
|
SU867734A2 |
| Стенд для испытаний системы управленияТОРМОжЕНиЕМ КОлЕС ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU839791A1 |
| Стенд для испытаний системы управления торможения колес транспортного средства | 1976 |
|
SU609660A1 |
| Стенд для испытаний систем управления торможением колес транспортных средств и чувствительных элементов этих систем | 1980 |
|
SU901113A1 |
| Стенд для испытаний систем управления торможением колес транспортных средств | 1980 |
|
SU935354A1 |
СТЕНД ДЛЯ ИСПЫТАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА, содержащий связанные междусобой .трансмиссией маховик-имитатор кинетической энергии и скорости транспортного средства, муфту-имитатор момента сцепления колеса с дорогой, имитатор колеса, муфту-имитатор тормозного MOj jeHта, первый тахогенератор, механически связанный с маховиком-имитатором, второй тахогенератор, механически связанный с имитатором колеса, и датчик момента, механически связанный с муфтой-имитатором тормозного момента, блок вычисления момента сцепления, состоящий из узла умножения, двух функциональных преобразователей, выходы которых подключены к входам узла умножения, и узла деления, вход делителя которого подключен к первому тахогенератору, вход делимого к второму тахогенератору,а выход к входу одного функционального преобразователя, причем вход второго функциональнога преобразователя подключен к первому тахогенератору, а выход узла умножения - к обмотке управления муфты-имитатора момента сцепления, блок вычисления тормозного момента, состоящий ия первого узла снабжения, выход которого подключен к обмотке управления муфты-имитатора тормозного момента, второго узла умножения, выход которого подключен к одному входу первого узла умножения, и трех функциональных преобразователей, причем выходы первого и второго функциональных преобразователей подключены к входам второго узла умножения, выход третьего - к второму входу первого узла умножения, а вход второго - к тормозу испытуемой системы, и блок вычисления температуры тормоза, состоящий из узла умножения, один вход которого подключен к датчику момента, а другой - к второму тахогенератору, и интегратора, вход которого подключен к выходу узла умножения, а выход - к входу третьего функционального преобразователя блока вычисления тормозного момента, отличающийся тем, что, с целью повышения точности стендовых испытаний и достоверности их результа- тов, вход первого функционального преобразователя блока вычисления тормозного момента подключен к второму тах о генера тору.
I.
25
. I Llj
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Стенд для испытаний системы управления торможением колес транспортного средства | 1981 |
|
SU975478A2 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
