Изобретение относится к электротехнике.
Целью изобретения является повышение линейности механической характеристики.
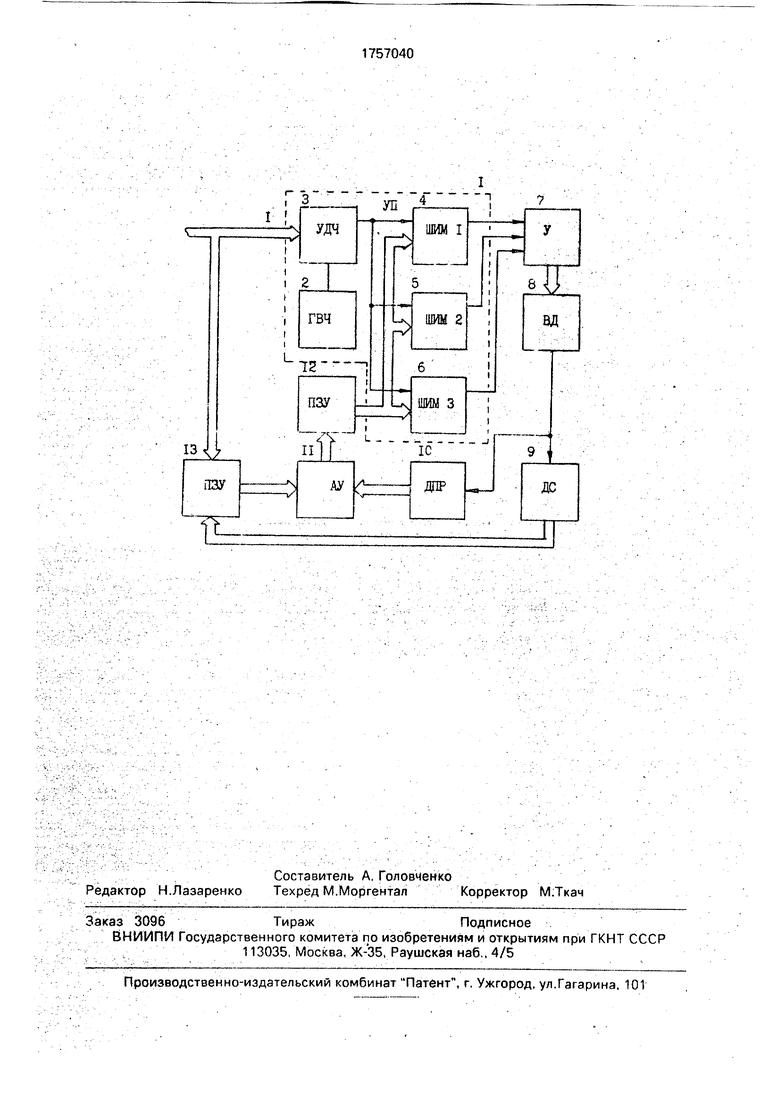
На чертеже приведена функциональная схема устройства, реализующего способ управления вентильным электродвигателем постоянного тока.
Оно содержит блок 1 умножения, включающий генератор 2 высокой частоты, и управляемый делитель 3 частоты, входом соединенный с выходом генератора высокой частоты, а выходом - с первыми входами широтно-импульсных модуляторов (ШИМ) 4-6. Кодовый вход управляемого делителя 3 частоты служит первым входом блока 1 умножения, вторые входы ШИМ 4-5 - вторым входом блока 1 умножения, а выходы ШИМ - выходом блока 1 умножения, подключенные к входам усилителя 7, выходы которого соединены с фазными выводами якорной
обмотки синхронной машины 8 вентильного двигателя.
На валу синхронной машины установлены датчик 9 частоты вращения и датчик 10 положения ротора, выход которого подключен к первому входу арифметического блока 11, второй вход которого соединен с выходом постоянного запоминающего устройства (ПЗУ) 12, а выход - с выходом второго постоянного запоминающего устройства 13, выходом подключенного к второму входу блока 1 умножения, к первому входу которого подключен второй вход ПЗУ 12.
Сущность способа управления вентильным электроприводом заключается в следующем.
Известно, что механические характеристики синхронной машины имеют вид:
%
COS/
мп 1 +Tiu/VuЈ
I/
&
ъ
VJ
сл
VI
2
о
1 -T3sln/ К ю
1 + -rV/aЈ °
где Mg - момент, развиваемой скоростной машиной;
Мп - пусковой момент синхронной машины:
со- частота вращения ротора синхронной машины;
w x - частота вращения холостого хода;
К - управляющее воздействие; р - угол установки датчика положения ротора;
Тэ - электромагнитная постоянная времени синхронной машины.
При линейности механические характеристики принимают вид
Ms - к - и- MnOV
Под управлением электроприводом понимают регулирование частоты вращения в соответствии с поступающим от системы управления или другого устройства сигналом.
Управлять частотой вращения ротора синхронной машины можно изменяя амплитуду Uy напряжения, подводимого к якорной обмотке синхронной машины.
Следовательно под параметром К понимается управляющее воздействие, т.е. сигнал управления от внешнего устройства, которое определяет амплитуду Uy напряжения, подводимого к якорным обмоткам синхронной машины и которое показывает, какую часть составляет амплитуда напряжения на якорных обмотках от напряжения U источника питания, т.е.
Отсюда видно, что управляющее воздействие К может изменяться от -1 до+1, что соответствует вариации частоты вращения ротора синхронной машины от -10 до +tO.
Задаваться К может как в виде кода при цифровой реализации с системы управления синхронной машиной, так и аналоговой величиной, например напряжением.
Решив систему из двух указанных уравнения относительно угла/ , получим закон изменения угла (3 в зависимости от частоты вращения ротора синхронной машины и управляющего воздействия К, при котором механические характеристики будут линейны
а . ,К + КТ|«-ш3т|/й п arcsm ( „- ) KvTTft rf)
ЧОЛЭ
которое выполняется только при условии, что
К + КТ|ш - u Ti/ct)
0
..
KV1 +ft/T| Для получения характеристики наиболее близких к линейным необходимо исследовать на минимум функцию (h - 1)2, где h находится из совместного решения соотношения, описывающего механические характеристики и соотношения вида
О)
K Мп
(Ох
Если h- 1, то механические характеристики будут более линейны, а функция (h - 1)2 в точке h 1 имеет глобальный минимум.
Диффе ренцируя по / функцию (h - 1)2 и приравнивая результаты нулю, получим /3 arctg(co Т, )
Способ в устройстве реализуется следующим образом.
Угол р положения ротора синхронной машины 8 и его частота у вращения преобразуются в коды датчика 10 положения ротора и датчика 9 частоты вращения.
В соответствии с заявляемым способом угол / установки датчика положения ротора изменяют в зависимости от управляющего воздействия К и частоты вращения ротора (о.
Вследствие сложности зависимости / от К и (D , как это видно из формулы изобретения, наиболее простое вычисление угла /3 осуществляется с помощью ПЗУ 13. При этом на младшие I разрядов ПЗУ 13 поступает код частоты вращения ротора v, а на старшие m-код управляющего воздействия Q, таким образом формируется адрес ячейки В. По указанному адресу из ПЗУ 13 извлекается код G угла / установки датчика положения ротора
G arcsin(C)-arctg() 1 .
G arctg(),
где
С в/(гт-р t Q тДз, v 1) l- f/ti -rf o/(Zm-D H-TjLat / 2r-D
Коды ДПР 10 и ПЗУ 13 обрабатываются АУ11 в соответствии с предлагаемым способом управления ВЭ, т.е. осуществляется операция вычисления адреса А ячейки ПЗУ 12A pF + G.
Таким образом, определяется аргумент гармонических функций &р+Р Выходной код АУ11 является входным для ПЗУ 12, в котором записаны коды длительности и знаки импульсов для каждой из фаз якорной
обмотки СМ, при этом в S(i-1) 1S(i-1)
разрядах сформированы коды RI длительности в соответствии с зако ном + р(|-1)2л:/Г1 +р .
RI (2s 1 - 1)(A/Am + p(M)/hj|, кроме того, в Si разрядах указываются соответствующие знаки импульсов, т.е. в ячейке с адресом А содержится код
(25-1-1)(2л(А/Ат +
П
+ p(i-1) -I.
где 3 S - разрядность выходного слоя ПЗУ 12:
Am - наибольшее значение адреса в ПЗУ 12, определяемое его емкостью
е 1 при з1п(2лг(-т- + p(i-1)/h))Q
е О при 51п(2л-(е- + p(i-1)/h))0
УП1 производит перемножение кода управляющего воздействия Q, формируемого внешним устройством (на фигурах не показано) с кодами тригонометрических функций, поступающих с ПЗУ 12, следующим образом. Код управляющего воздействия поступает на вход УДЧ 3, на второй вход которого подключен ГВЧ 2, импульсы с выхода которого следуют с частотой f. На выходе УДЧ 3 будут присутствовать импульсы с частотой f/Q. Длительности импульсов в виде кодов RI, поступающих в ПЗУ 12, записываются в ШИМ 4 - ШИМ б, на вычитающие входы которых поступает частота f/Q, при этом длительность выходных импульсов будет равна RiQ/f. Если коды RI записываются в ШИМ 4 - ШИМ 6 с частотой fi, то для нормальной работы УП1 необходимо, чтобы f fi 2s 2m
Тогда длительность выходных импульсов будет равна
RiQ/(f I 2s 2m) или
JK) + p(i-1)
Широтно-модулированные импульсные последовательности усиливаются в усилителе У7, который фактически производит перемножение KJsin(p + 2jrp(i-1)/h + /3)|на напряжение источника питания U, и поступают на якорные обмотки СМ
Формула изобретения Способ управления вентильным электродвигателем постоянного тока с датч йком
положения ротора на валу его синхронной машины, при котором измеряют положение ротора синхронной машины вентильного электродвигателя и его частоту вращения и подводимое к одной из фаз якорной обмотки синхронной машины напряжение изменяют в функции указанных измеренных параметров и угла установки датчика положения ротора по закону
Ui KUsin{p(p+ (i-1)) +
дополнительно по определенному закону изменяют угол установки датчика положения ротора в зависимости от частоты вращения ротора синхронной машины, отличающийся тем, что, с целью повышения линейности характеристик, указанное изме- нение угла установки датчика положения ротора осуществляют по закону
и
« . K + KTlw-a/hi/ftfc,. /и arcsin (; - )
KVTTuTtT arctg W
к + KTift -uj3Ti/ yx
при
куТТолТ
Ј1
/3 arctg(wT3) при К + Klico -
1
KV1
где К - коэффициент пропорциональности, учитывающий неперпендикулярность магнитных полей статора и ротора синхронной машины;
U - напряжение источника питания; р - число пар полюсов;
п - число фаз якорной обмотки синхронной машины;
/ - угол установки датчика положения ротора;
L, R - индуктивность и активное сопро- тивление якорной обмотки;
Тэ- PD - электромагнитная постоянк
ная времени двигателя;
(о х - частота вращения холостого хода; а) - частота вращения ротора синхронной машины.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления вентильным электродвигателем постоянного тока | 1989 |
|
SU1757039A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1991 |
|
RU2016472C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1991 |
|
RU2016473C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПОСТОЯННОГО ТОКА | 1991 |
|
RU2016474C1 |
| Вентильный электропривод | 1986 |
|
SU1670752A2 |
| Вентильный электропривод с цифровым управлением | 1988 |
|
SU1582291A1 |
| Вентильный электропривод | 1987 |
|
SU1480084A1 |
| Вентильный электропривод | 1988 |
|
SU1713072A1 |
| Вентильный электропривод с непосредственным питанием от сети переменного тока | 1989 |
|
SU1721738A1 |
| Вентильный электропривод | 1990 |
|
SU1791953A1 |
Использование: в электроприводах станков и механизмов. Сущность изобретения: в процессе управления вентильным электродвигателем одновременно с изменением напряжения, подводимого к фазе якорной обмотки синхронной машины в функции частоты вращения ротора синхронной машины, и угла установки датчика положения ротора изменяют и угол установки указанного датчика, определяемого конструкцией синхронной машины и учитывающего неперпендикулярность магнитных полей статора и ротора синхронной машины. 1 ил.
| Овчинников И.Е., Лебедев Н.И | |||
| Бесконтактные двигатели постоянного тока | |||
| Л.: Наука, 1978, с | |||
| Способ обработки грубых шерстей на различных аппаратах для мериносовой шерсти | 1920 |
|
SU113A1 |
| Известия Вузов | |||
| Электромеханика, 1986, № 6, с | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
