Изобретение относится к землеройно- трэнспортным машинам и планировщикам и может использоваться для окончательной планировки (выравнивания) поверхности полей.
Известен бульдозер-планировщик, содержащий базовую машину, отвал с толкающими брусьями, длинобазовый датчик положения отвала, состоящий из передней балки с самоустанавливающимся опорным колесом и из задней балки, кинематически связанной с базовой машиной и шарнирно связанной с передней балкой с возможностью поворота передней балки в горизонтальной плоскости или ее блокирования, и
гидропривод, включающий гадроцилиндр подъема отвала и следящий гидроаппарат, кинематически связанный с отвалом и с задней балкой.
Недостатком данного устройства является недостаточная чувствительность и быстродействие следящего гидроаппара- из-за чего понижается качество плэнирой- ки.
Цель изобретения - повышение качества планировочных работ путем повышения чувствительности и быстродействия следящего аппарата.
Цель достигается тем, что в бульдозере- планировщике, содержащем базовую
««
шину, отвал с толкающими брусьями, дли- нобазовый датчик положения отвала, состо- ящий из передней Сслки с самоустанавливающимся опорным колесом и из задней балки, кинематичесхм связанной с базовой машиной и шарнирно связан ной с передней балкой с возможностью поворота балки в горизонтальной плоскости или ее блокирования, и гидропривод, включающий гидроцилиндр подъема отвала и следящий гидроаппарат, кинематически связанный с отвалом и с задней балкой, гидропривод снабжен дополнительным гидроцилиндром, корпусом шарнирно связанным с базовой машиной и штоком - с отвалом, что обеспечивает необходимый подъем или опускание отвала, при плавающем положении основного гидроцилиндра, в зависимости от величины неровности опорной поверхности под опорно-копирую- щим колесом, а следящий гидроаппарат вы- полнен из подключенного к рабочим полостям дополнительного гидроцилиндра следящего гидрораспределмтсля с отрицательным перекрытием его каналов, что позволяет направлять рабочую жидкость из верхнего канала гидрораспределителя в нижнюю полость дополнительного гидроцилиндра и наоборот, причем, корпус следящего гидрораспределителя шарнирно связан с отвалом, а его золотник - с задней балкой, что обеспечивает синхронное перемещение в одном направлении корпуса следящего гидрораспределителя со штоком дополнительного гидроцилиндра поднимающего или опускающего отвал плчнировщи- ка.
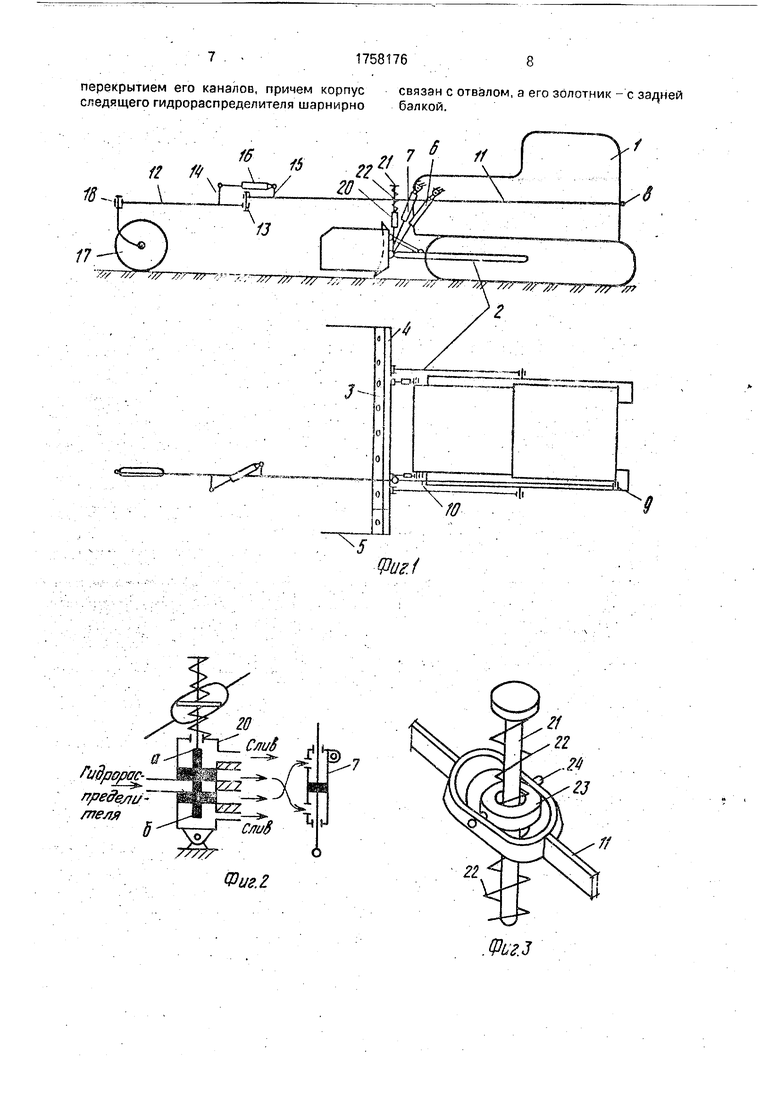
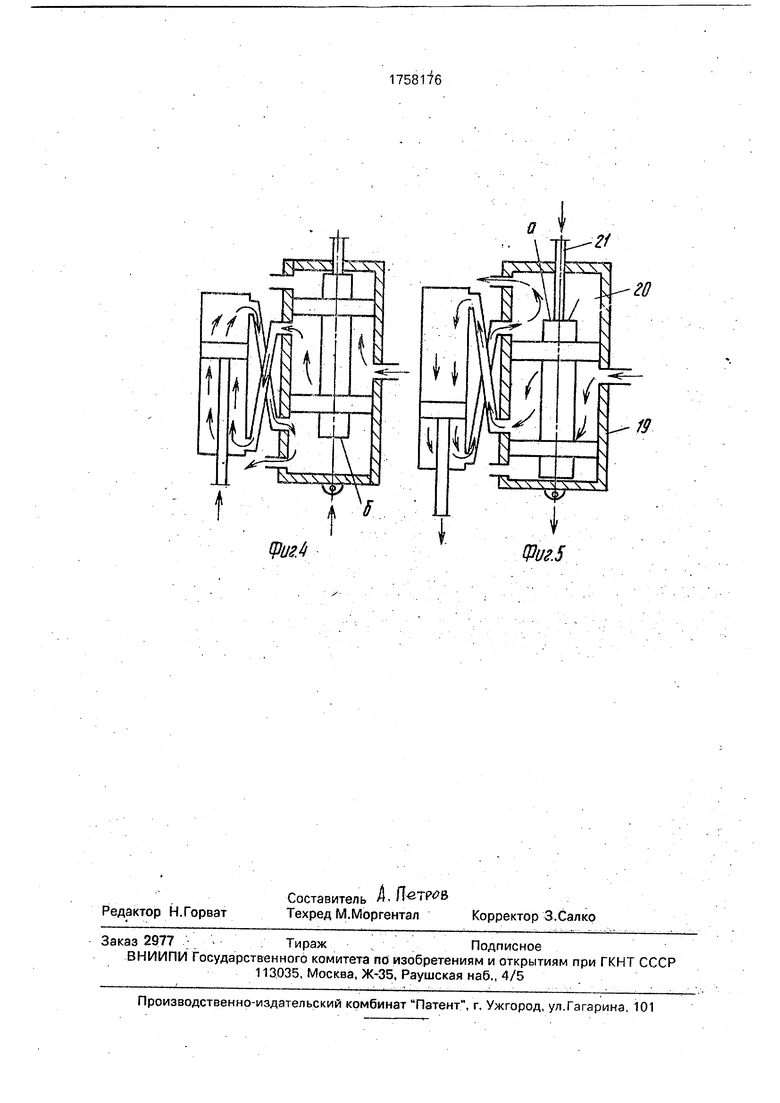
На фиг. 1 показан бульдозер-планировщик, вид сбоку м в плане; на фиг. 2 - схема следящего гидрораспределителя и его взаимосвязь с дополнительным гидроцилиндром и датчиком; на фиг. 3-узел шарнирного соединения штока следящего гидрораспределителя с балкой датчика; на фиг. 4 и 5 - схема соединения каналов следящего гидрораспределителя с полостями дополнительногогидрораспределит&лясоответственно при подъеме и опускании рабочего органа.
Бульдозер-планировщик содержит базовую машину 1, толкающую раму 2, отзал- -ковш 3 со сьемными боковыми удлинителями 4 и открылками 5, основные 6 и дополнительные 7 гидроцилиндры управления положением отвала-ковша. На базовой машине при помощи горизонтальной шарнирной оси 8 через втулку 9 и ограничителя бокового увода 10 установлен длинобэ- зовый датчик, состоящий из задней 11м передней 12 балок, соединенных между собой вертикальным шарниром 13 и жестко закрепленных на них Г-образных рычагов 14 и 15, связанных между собой через гидроцилиндр 16, самоустанавливающегося опорно-копирующего колеса 17, соединенного с передней частью балки 12 при помощи вертикального шарнира 18. К тыльной стороне отвала-ковша 3 шарнирно закреплен корпус 19 следящего гидрораспределителя 20 с отрицательным перекрытием нагнетательных каналов, а к задней балке датчика шарнирно крепится шток 21 золотника гидрораспре- депителя при помощи демпфирующих пру- жин 22 и диска 23 с центральным
отверстием, имеющею возможность качания относительно горизонтальней оси 24.
Нагнетательные каналы следящего гидрораспределителя 20 сообщаются с напорными полостями дополнительного
гицроцилиндра 7, котсг - шарнирно крепится корпусом к базовой машине, а штоком - к отвалу-ковшу.
Бульдозер-планировщик работает как длинобазовый планировщик, таким образом.
После опускания отвала-ковша 3 на землю с помощью гидроцилиндра 6, последний переводится в плавающее положение с целью исключения влияния его на работу
дополнительного гидроцилиндра 7. Далее балку датчика устанавливают горизонтально к поверхности планируемого участка на уровне проектной отметки. Затем регулируют положение золотника со штоком 21, чтобы он занимал нейтральное положение (фиг. 2} при котором заблокируются обе сливные полости гидрораспределителя 20 и рабочая жидкость одновременно заполнит обе напорные полости дополнительного гидроцилиндра 7, тем самым обеспечивая удерживание отвала 3 в заднем первоначальном положении.
При движении агрегата впереди него по земле катится самоустанавливающееся опорное колесо 17, которое при встрече с выемкой или возвышением на поверхности планируемого участка, соответственно, опускается или поднимается. Вместе с колесом идентичное движение в вертикальной плоскости совершает балка датчика, поворачиваясь на оси 8 через втулку 9. При этом боковой увод балки с самоустанавливающимся колесом 3 предотвращается ограни- 5 читзлем 10. Перемещение балки датчика вверх или вниз передается через диск 23 и демпфирующие пружины 22 штоку 21 золот- ника (фиг, 3) что вызывает смещение его относительно корпуса 19 гидрораспределителя в ту же сторону, что и бзлка датчика на
величину, определяемую известным соотношением (фиг, I)
Н „JL if I
где Н - высота или глубина зыемки; h - величина подъема или опускания балки датчика в точке соединения со штоком; L - длина базы датчика; I - расстояние между точками крепления балки датчика к задней части базовой машины и к штоку золотчика.
Вследствие этого нижний или верхний нагнетательный канал, отсекаясь от подводящей полости парораспределителя 20, сообщается с его сливной частью (фиг. 4 и 5). При этом, например, при перемещении золотника вверх (фиг, 4) изолирован нижний нагнетательный канап, тогда жидкость через верхний канал поступает в нижнюю напорную полость дополнительного гидроцилиндра 7, который осуществляет подьем отвала 3 и вместе с ним подъем корпуса 19 гидрораспределителя 20 относительно его золотника до достижения нейтрального положения, при котором автоматически прекращается дальнейший подъем отвала 3. А при встрече колеса 17с выемкой все происходит наоборот (фиг. 5), Отсюда видно, что направление перемещения золотника со штоком 21, после его переключения под действием балки датчика, и перемещения его корпуса 19 вместе с отвалом 3 под действием дополнительного гид- роцмлиндра 7 происходит в одном направлении.
С целью предотвращения поломки балки датчика или штока 21 золотника при их перемещении необходимо соблюдение условия vi va, где vi -скорость перемещения корпуса гидрораспределителя или дополнительного гидроцилиндра. V2 - скорость перемещения штока гидрораспределителя.
Это условие обеспечивается подбором дополнительного гидроцилиндра с соответствующим внутренним диаметром d используя известную формулу v -- м/с, где Q
- производительность гидронасоса, а также применением дополнительной системы страховки, состоящей из демпфирующих пружин 22, жесткость и стержень сжатия которых позволяет наступление реакции золотника, на перемещение балки датчика, в пределах агротехнического требования выровненности поверхности планировки ± (3-5) см. Отсутствие реакции системы на незначительные неровности поверхности повышает качество планировки.
Для предотвращения запирания подводящей магистрали гидрораспределителя 20 его золотники снабжены буртиками а и б (фиг. 2, 4, 5), которые ограничивают мак- 5 симальный ход золотника, не позволяя ему достигнуть подводящей магистрали.
Таким образом, предлагаемое устройство полностью заменяет массивные маломаневренные длинобазовые пла- 10 нировщики, действуя по их принципу, с разницей, заключающейся в том, что рама выполняет только функции длинной базы, несушей опоры базовой машины. К тому же оно является легкосъемным смен- 15 ным оборудованием к бульдозеру.
В конце гона для разворота агрегата запирается подвод жидкости к следящему гидрораспределителю 20 и при помощи основных гидроцилиндров 6 производится 20 подъем отвала. После разворота операция производится в обратной последовательности. Для перемещения агрегата в транспортное положение передняя часть 12 балки складывается с задней частью 11 путем пе- 5 ревода гидроцилиндра 16, соединяющего Г- образные рычаги 14 и 15 в плавающее положение при одновременном движении агрегат или втягивая шток гидроцилиндра 16 при неподвижном агрегате 0 Положительным эффектом предлагаемого изобретения по сравнению с прототипом является достаточная чувствительность системы и быстродействие системы управления рабочим органом, и простота монта- 5 жа и демонтажа системы.
Формула изобретения Бульдозер-планировщик, содержащий базовую машину, отвал с толкающими брусьями, длинобазовый датчик положения 0 отвала, состоящий из передней балки с са- моуСтанавливающимся опорным колесом и из задней балки, кинематически связанной с базовой машиной и шарнирно связанной с передней балкой с возможностью поворо- 5 та передней балки в горизонтальной плоскости или ее блокирования, и гидропривод, включающий гидроцилиндр подъема отвала и следящий гидроаппарат, кинематически связанный с отвалом и с задней балкой, о т 0 личающийся тем, что, с целью повьм е- ния качества планировочных работ за счбг повышения чувствительности и быстродействия следящего гидроаппарата, гидропривод снабжен дополнительным 5 гидроцилиндром, корпусом шарнирно связанным с базовой машиной и штоком - с отвалом, а следящий гидроаппзрат выполнен из подключенного к рабочим полостям дополнительного гидроцилиндрт следящего гидрораспределителя с огрицятельным
перекрытием его каналов, причем корпус связан с отвалом, а его золотник - с задней следящего гидрораспределителя шарнирно балкой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический планировщик | 1980 |
|
SU1051170A1 |
| Автоматический планировщик | 1986 |
|
SU1421831A1 |
| Рабочий орган планировщика | 1986 |
|
SU1384671A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ БУЛЬДОЗЕРА | 2019 |
|
RU2712835C1 |
| Планировщик | 1986 |
|
SU1384670A1 |
| БУЛЬДОЗЕРНОЕ ОБОРУДОВАНИЕ | 2020 |
|
RU2761456C1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ РАБОЧЕГО ОБОРУДОВАНИЯ БУЛЬДОЗЕРА | 1994 |
|
RU2078177C1 |
| Планировщик | 1979 |
|
SU829802A1 |
| Гидромеханическая система управления отвала бульдозера | 1981 |
|
SU1094917A1 |
| Планировочная машина | 1980 |
|
SU909028A1 |
Изобретение относится к землеройно- транспортным машинам. Целью изобретения является повышение качества планировочных работ за счет повышения чувствительности и быстродействия следящего гицроаппрарата. Бульдозер-планировщик содержит базовую машину 1 и отвал 3 с толкающими брусьями 2. На машине 1 установлен длинобазовый датчик положе- .ния отвала. Датчик состоит из передней бал- ки (Б) 12 с самоустанавливающимся опорным колесом 17 и из задней Б 11. Задняя Б 11 кинематически связана с машиной 1 и шзрнирно связана с Б 12 с возможностью поворота 5 12 в горизонтальной плоскости или ее блокирования. Гидропривод бульдозера-ппланировщика содержит гидроцилиндр (ГЦ) 6 подъема отвала и следящий гидроаппарат Последней кинематически связан с отвалом 3 и с Б 11, Гидропривод снабжен дополнительными ГЦ 7. Корпус ГЦ 7 шарнирно связан с машиной 1. Шток ГЦ 7 связан с отвалом 3, Следящий гидроаппарат выполнен из подключенного к рабочим полостям ГЦ 7 следящего гиДрораспредепителя (ГР) 20 с отрицательным перекрытием его каналов. Корпус ГР 20 шарнирно связан с отвалом 3. Золотник ГР 20 шзрнирно связан с Б 11. При перемещении золотника ГР 20 осуществляется следящее движение штока ГЦ 7 и отвала 3 с необходимым быстродействием при высокой чувствительности. Это позволяет повысить качество планировочных работ. 5 ил,
Гидрораспре&зли-/яеля
О
Фиг. Z
м
Фиг.1
.fatJ
ШЬ
Фиг.5
| Автоматический планировщик | 1986 |
|
SU1421831A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
