2. Система по п, 1, о т л и ч а ю щ а я с я тем, что установочньй
стержень .вьтолнен регулируемым по длине.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННО-ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ОТВАЛОМ БУЛЬДОЗЕРА | 2016 |
|
RU2624079C1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ РАБОЧЕГО ОРГАНА ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ | 2011 |
|
RU2470120C1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ РАБОЧЕГО ОБОРУДОВАНИЯ БУЛЬДОЗЕРА | 1994 |
|
RU2078177C1 |
| Бульдозер | 1981 |
|
SU962481A1 |
| Способ управления рабочим процессом бульдозера | 1985 |
|
SU1328449A1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ УГЛА НАКЛОНА РАБОЧЕГО ОРГАНА ПЛАНИРОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2422594C1 |
| ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА СТАБИЛИЗАЦИИ УГЛА НАКЛОНА РАБОЧЕГО ОРГАНА ПЛАНИРОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2433224C1 |
| Установка для испытаний промышленного трактора | 1990 |
|
SU1742665A1 |
| Бульдозер-планировщик | 1990 |
|
SU1758176A1 |
| Устройство для управления поперечным перекосом отвала бульдозера (его варианты) | 1983 |
|
SU1153015A1 |
1. ГИДРОМЕХАНИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ОТВАЛА БУЛЬДОЗЕРД, включающая насосную установку, гидроциI линдры, кран-переключатель, маятниковый датчик углового положения, связанный с толкающими брусьями и со штоком управляющего Золотника двухкаскадного гидравлического распределителя, отличающаяся тем, что, с целью повьшения качества планировочных работ, датчик углового положения установлен на раме трактора, а его связь с толкающими брусьями и штоком управляющего золотника выполнена из жестко закрепленного на толкающем брусе рычага, из шарнирно установленного на последнем и шарнирно соединенного со штоком управ§ ляющего золотника суммирующего рычага и из установочного стержняi который (Л связан с суммирующим рычагом и ма1 ятником датчика углового положения.
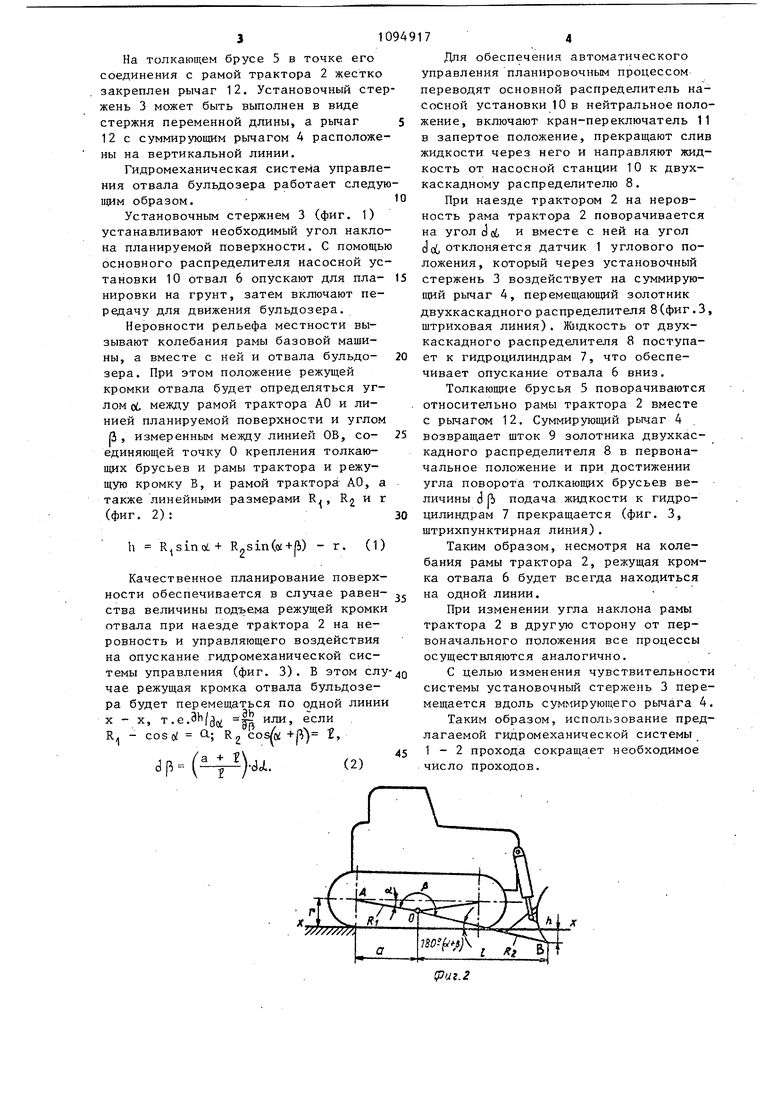
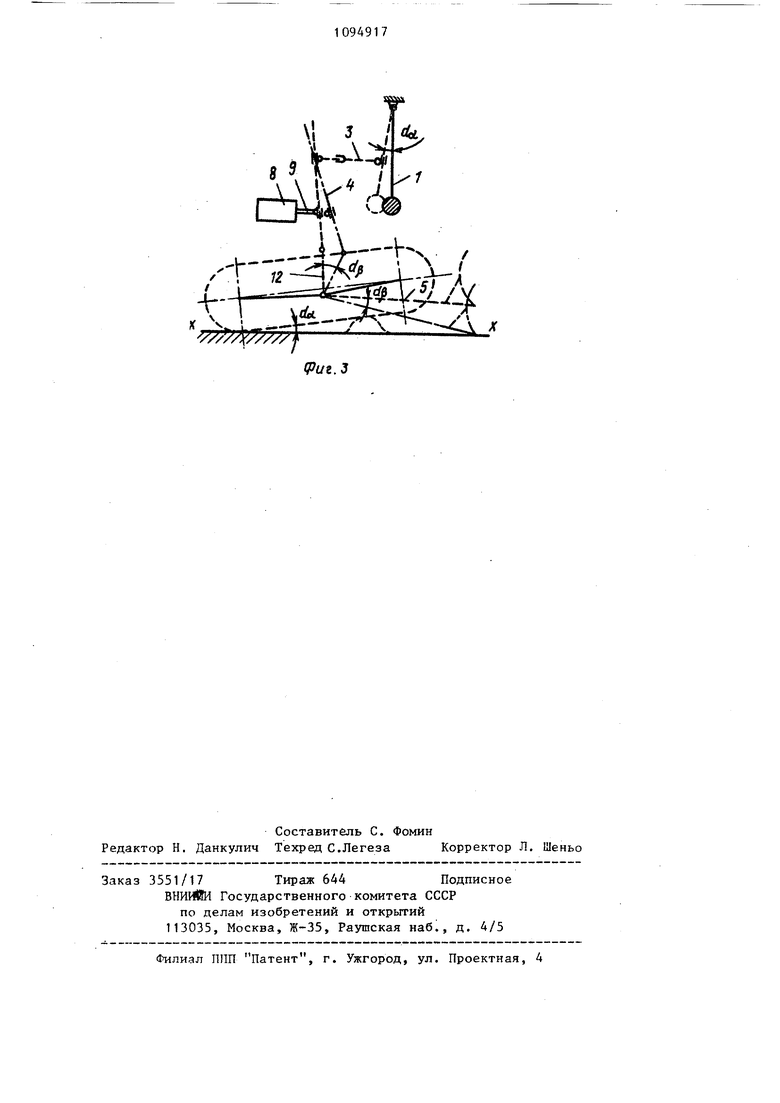
Изобретение относится к области строительно-дорожных машин, а именн к гидроприводам бульдозеров. Известна система управления отва лом бульдозера типа Автоплан, содержащая датчик углового положения, установленный на толкающих брусьях бульдозера, гидрораспределитель с электрогидравлическим управлением, пульт управления, силовую насосную установку с цилиндрами рабочего оборудования lj . Недостатками указанной системы управления отвалом бульдозера являются недостаточная точность и производительность из-за погрешностей в определении координаты режущей кромк отвала. Наиболее близким к изобретению является гидромеханическая система управления отвала бульдозера, включ щая насосную установку, гидроцилинд кран-переключатель, маятниковый дат чик углового положения, связанный с толкающими брусьями и со штоком управляющего золотника двухкаскадного гидравлического распределителя 2}. Недостаток известной системы заключается в том, что осуществляется стабилизация только углового положания отвала бульдозера независимо от положения корпуса базовой машины. Эт приводит к погрешностям определения положения режущей кромки отвала, так как колебания корпуса базовой машины вызьгеают дополнительные перемещения отвала и снижают точность планировоч ных работ. При этом для достижения , требуемой точности требуется произвести несколько проходов по одному и тому же месту, что снижает и произ водительность бульдозера. Целью изобретения является повыше ние качества планировочных работ. Указанная цель достигается тем, что у гидромеханической системы управления отвала бульдозера, включающей насосную установку, гидроцилиндры, кран-переключатель, маятниковый датчик углового положения, связанный с толкающими брусьями и со штоком управляющего золотника двухкаскадного гидравлического распределителя, датчик углового положения установлен на раме трактора, а его связь с толкающими брусьями и штоком управляющего золотника вьтолнена из жестко закрепленного на толкающем брусе рычага, из шарнирно установленного на последнем и шарнирно соединенного со штоком управляющего золотника суммирующего рычага и из установочного стержня, который связан с суммирующим рычагом и маятником датчика углового положения. Кроме того, установочный стержень выполнен регулируемым по длине. Такое выполнение устройства обеспечивает точное определение координаты режущей кромки, повьш1ает точность планировочных работ и производительность машины за счет сокращения числа проходов по планируемой поверхности. На фиг. 1 представлена схема гидромеханической системы управления отвала бульдозера; на фиг. 2 - схема определения координаты режущей кромки отвала бульдозера; на фиг. 3 схема положения элементов гидромеха-нической системы управления при наезде трактора на неровность. Гидромеханическая система управления отвала бульдозера (фиг. 1) состоит из датчика 1 углового положения, рамы трактора 2, соединенного с установочным стержнем 3 для задания требуемого уклона поверхности. Установочный стержень 3 закреплен на суммирующем рычаге 4. Толкающие брусья 5 смонтированы с отвалом 6, к которому прикреплены гидроцилиндры 7, соединенные трубопроводами с двухкаскадным распределителем 8, имеющим шток 9 управляющего золотника насосной установкой 10 и краном-переключателем 1 1. На толкающем брусе 5 в точке его соединения с рамой трактора 2 жестко закреплен рычаг 12, Установочный стер жень 3 может быть выполнен в виде стержня переменной длины, а рычаг 12 с суммирующим рычагом А расположены на вертикальной линии. Гидромеханическая система управления отвала бульдозера работает следую щим образом. Установочным стержнем 3 (фиг, 1) устанавливают необходимый угол наклона планируемой поверхности, С помощью основного распределителя насосной установки 10 отвал 6 опускают для планировки на грунт, затем включают передачу для движения бульдозера. Неровности рельефа местности вызывают колебания рамы базовой машины, а вместе с ней и отвала бульдозера. При этом положение режущей кромки отвала будет определяться углом oi, между рамой трактора АО и линией планируемой поверхности и углом А, измеренным между линией ОБ, соединяющей точку О крепления толкающих брусьев и рамы трактора и режущую кромку В, и рамой трактора- АО, а также линейными размерами R (фиг, 2): h R sin06+ R2sin(o;+|i) - г, Качественное планирование поверхности обеспечивается в случае равенства величины подъема режущей кромки отвала при наезде трактора 2 на неровность и управляющего воздействия на опускание гидромеханической системы управления (фиг, 3), В этом сл чае режущая кромка отвала бульдозера будет перемещаться по одной лини X - X, T,e,3h/3( 1 или, - lua ИЗ / „ -о - cosoi Q-; RZ () 10 Rj и г 74 Для обеспечения автоматического правления планировочным процессом ереводят основной распределитель наосной установки 10 в нейтральное полоение, включают кран-переключатель 11 в запертое положение, прекращают слив идкости через него и направляют жидкость от насосной станции 10 к двухкаскадному распределителю 8, При наезде трактором 2 на неровность рама трактора 2 поворачивается на угол (Jot и вместе с ней на угол с оС отклоняется датчик 1 углового положения, который через установочный стержень 3 воздействует на суммирующий рычаг 4, перемещающий золотник двухкаскадного распределителя 8 (фиг, 3, штриховая линия). Жидкость от двухкаскадного распределителя 8 поступает к гидроцилиндрам 7, что обеспечивает опускание отвала 6 вниз. Толкающие брусья 5 поворачиваются относительно рамы трактора 2 вместе с рычаг(1 12, Суммирующий рычаг 4 . возвращает шток 9 золотника двухкаскадного распределителя 8 в первоначальное положение и при достижении угла поворота толкающих брусьев величины d Ь подача жидкости к гидроцилиндрам 7 прекращается (фиг, 3, щтрихпунктирная линия), Таким образом, несмотря на колебания рамы трактора 2, режущая кромка отвала 6 будет всегда находиться на одной линии. При изменении угла наклона рамы трактора 2 в другую сторону от первоначального положения все процессы осуществляются аналогично, С целью изменения чувствительности системы установочный стержень 3 перемещается вдоль суммирующего рычага 4, Таким образом, использование предлагаемой гидромеханической системы . 1 - 2 прохода сокращает необходимое число проходов.
./И
7 C±NV
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| А.А.Скловский | |||
| Автоматизация землеройно-планировочных машин | |||
| Рига, Лиесма, 1975, , с | |||
| Способ прикрепления барашков к рогулькам мокрых ватеров | 1922 |
|
SU174A1 |
| Щербаков B.C | |||
| и др | |||
| Приспособление для записи звуковых явлений на светочувствительной поверхности | 1919 |
|
SU101A1 |
| Гидропривод и системы управления | |||
| Новосибирск ,1977 (прототип). | |||
