Изобретение относится к зенперой- ной технике, а именно к планировщиКЕМ,
Цель изобретения - повьшение на-- дежности и расширение эксплуатацион ных возможностей.
На чертеже изображен автоматический планировщик,.
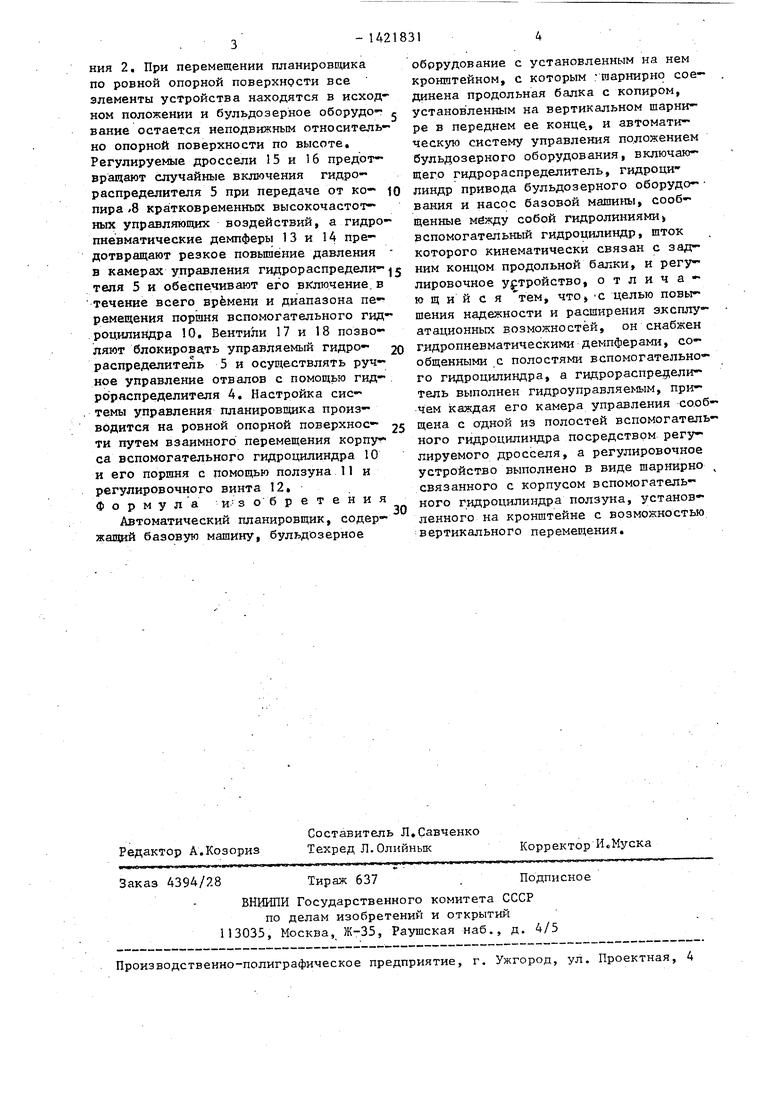
Автомати еский планировщик содёр- жит базовую машину 1, бульдозерное оборудование . отвалом и гидроцилиндры 3 привода бульдозерного оборудования (показан один гидроцилиндр), соединенные гидролиниями с .основным А и гидроупрявляемым трехпозиционным 5 гидрораспределителями. На бульдозерном оборудовании 2 жестко закреплен кронштейн 6, а с ним шарнирно соедине на продольная балка 7 с копиром 8 в виде колеса, установленным на вертикальном шарнире в передней ее части. родольная балка 7 вместе с копиром 8 может подниматься в транспортное положение благодаря.шарниру 9, кото рый в рабочем положении блокируемся скользящей втулкой. Задний конец продольной балки 7 шарнирно соединен со штоком вспомогательного гидроцилиндра 10, шарнирно соединенного корпусом с ползуном 11, установленным с возможностью вертикального перемещения по кронштейну 6 с помощью регулировочного винта 12. Полости вспомогательного гидроцилиндра 10 соединены с гидро- пневматическими демпферами 13 и 14, а через регулируемые дроссели 15 и 16 и вентили 17 и 18 - с камерами управления гйдрораспределителя 5 Кроме того, указанные полости сообщены с гидробаком через компенсационные каналы 19, расположенные по обе стороны -от поршня в средней, части вспомогательного гидроцилиндра 10.
Планировщик работает следующим . образом, .
. В исходном положении,изображенном на чертеже планировщик находится на ровной опорной поверхности. Опорная поверхность гусениц, копира 8 и нож расположены в одной плоскости. Поршень вспомогательного гидроцилиндра 10 находится в средней части между компенсационными каналами 19 |сообщающими с гидробаком гидропневматические демпферы 13 и 14 и камеры управления гидрораспределителя 5, золотник которого под действием пружин занимает нейтральную позицию, пере
0
5
0
5
0
5
0
5
0
5
крывая все гидролинии. Золотник основного гидрораспределителя 4 также накощпся в нейтральной позиции.
Рассмотрим работу планировщика при перемещении по неровной поверхности. Пусть, например, копир 8 наезжает на возвьшение, тогда балка 7 поворачивается против хода часовой стрелки и ее зад1шй конец опускает поршень вспомогательно го гидроцилинд- .ра 10. Опускаясь поршень перекрыва- . ет нижний компенсационнь й канал 19 и вытесняет рабочую жидкость через дроссель 15 и вентиль 17 в нижнюю ,камеру управления гйдрораспределителя 5, Под действием давления рабочей жидкости золотник гидрораспреде- лителя 5, преодолевая усилие пружин, поднимаемся и включает идр.оцилиндр 3 на подъем бульдозерного оборудования 2, При подъеме бульдозерного оборудования 2 продольная балка 7 повора- чиваетс.я относительно отвала в проти- воположную сторону, .т.е. по ходу часо- ;вой стрелки. Этот поворот и подьем I бульдозерного оборудования совершается до тех пор, пока поршень вспомогательного гидроцилиндра 10 не вернется в исходное положение между компенса - ционными каналами, которые соединяют камеры управления гидрораспределителя 5 с гидробаком, обеспечивая возвращение золотника в нейтральную позицию и остановку бульдозерного оборудования 2, В этом положении опорная поверхность гусениц, копира 8 и нож опять оказьшаются в одной плоскости. При опускании копира 8 в выемку в процессе планировочных работ система управления действует аналогичным образом.
Поршень-вспомогательного гидроци- линдрр 10 поднимается и повьш1ает давление в верхней камере управления гидрораспределителя 5, золотник которого йпуск ается и включает гидроци -: линдр 3 на опускание. Опускание бульдозерного оборудования 2 продолжается до , тех пор, пока опорная поверхность гусениц, копира 8 и нож не окажутся в одной плоскости, В этом случае поршень вспомогательного гидроцилиндра 10 занимает исходное положение между компенсационными каналами, сообщаю щими камеры управления с гидробаком, а золотник возвращается пружинами в нейтральную позицию, останавливая опускание бульдозерного оборудования 2. При перемещении планировщика по ровной опорной поверхности все элементы устройства находятся в исходном положении и бульдозерное оборудо- , ванне остается неподвижным относитель-- но опорной поверхности по высоте. Регулируемые дроссели 15 и 16 предот-- вращают случайные включения гидро- распределителя 5 при передаче от ко ю пира 8 кратковременных высокочастот ных управляющих воздействий, а гидро- пневматические демпферы 13 и 14 предотвращают резкое повьшёние давления - в камерах управления гидрораспредели- 5 теля 5 и обеспечивают его включение в течение всего времени и диапазона перемещения поршня вспомогательного гид роцилиндра 10. Вентили 17 и 18 позво« ляют блокировг ть управляемый гидро- 20 распределитель 5 и осусдествлять ручное управление отвалов с помощью гид- . рораспределителя 4. Настройка сис- те;мы управления планировщика производится на ровной опорной поверхности путем взаимного перемещения корпуса вспомогательного гидроцилиндра 10 и его поршня с помощью ползуна 11 и регулировочного винта 12. Формул а из обретения Автоматический планировщик, содержащий базовую машину, бульдозерное
25
30
оборудование с установленным на нем кронштейном, с которым .-шарнирно соединена продольная балка с копиром, установленным на вертикальном шарнире в переднем ее конце., и автоматическую систему управления положением бульдозерного оборудования, включающего гидрораспределитель, гидроци- линдр привода бульдозерного оборудо- вания и насос базовой машины, сообщенные между собой гидролиниями вспомогательный гидроцилиндр, шток которого кинематически связан с задним концом продольной балки, и регулировочное устройство, отличающийся тем, что, С целью повышения надежности и расширения эксплуатационных возможностей, он снабжен гидропневматическими демпферами, сообщенными с полостями вспомогательного гидроцилиндра, а гидрораспре5,ели- тель выполнен гидроупрявляемым, причем каждая его камера управления со.об- щена с о дной из полостей вспомогательного гидроцилиндра посредством регулируемого дросселя, а регулировочное устройство выполнено в виде шарнирно связанного с корпусом вспомогательного гидроцилиндра ползуна, установленного на кронштейне с возможностью вертикального перемещения.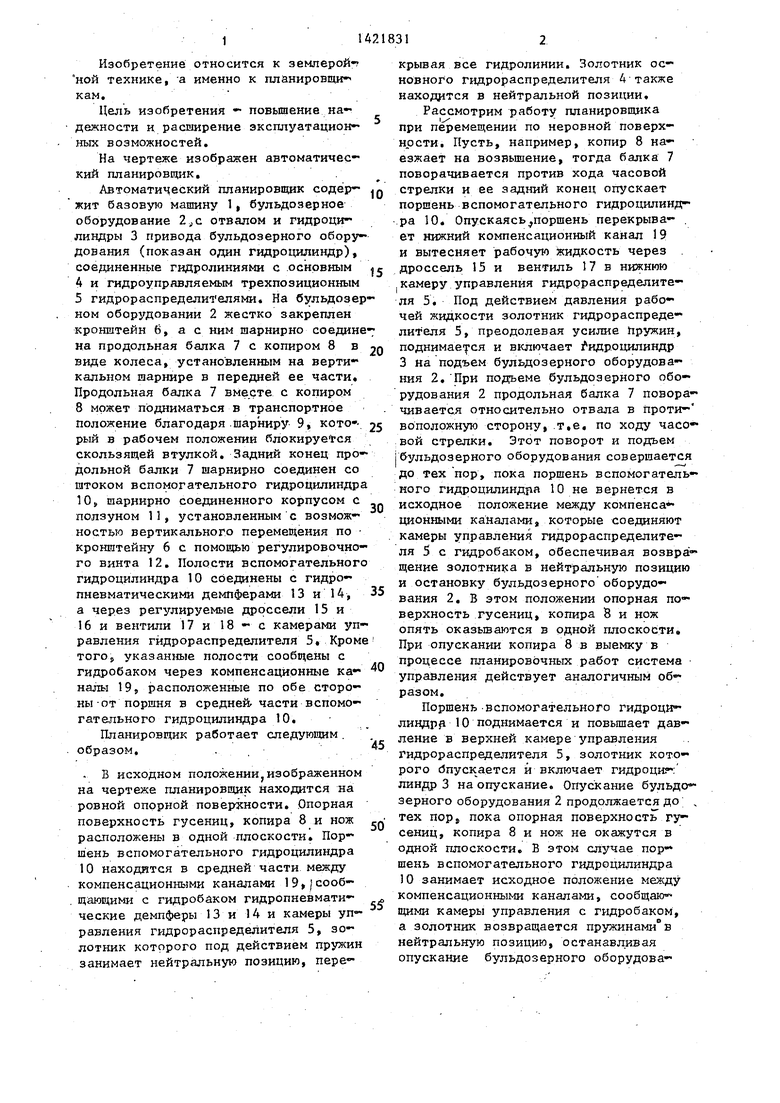
| название | год | авторы | номер документа |
|---|---|---|---|
| Планировщик | 1986 |
|
SU1401115A1 |
| Погрузчик для лесоматериалов | 1986 |
|
SU1399262A2 |
| Гидропривод рабочего оборудования землеройной машины | 1985 |
|
SU1303681A1 |
| Гидромеханический привод погрузчика | 1986 |
|
SU1467144A1 |
| Автогрейдер | 1986 |
|
SU1490315A1 |
| Бульдозер | 1987 |
|
SU1481346A1 |
| Устройство управления рабочим органом землеройной машины | 1987 |
|
SU1463878A1 |
| Устройство для установки грузоподъемного механизма на транспортное средство | 1986 |
|
SU1493505A1 |
| Гидропривод рабочего оборудования бульдозера двустороннего действия | 1988 |
|
SU1602956A1 |
| Самоподнастраивающийся линейный шаговый электрогидравлический привод | 1975 |
|
SU735832A1 |
Изобретение относится к землеройной технике и позволяет повысить надежность и расширить эксплуатационные возможности планировщика. На бульдозерной оборудовании 2 жестко. закреплен .кронштейн 6. С ним шарнир- но соединена продольная балка 7 с копиром В в виде колеса, установленного на Вертикальном шарнире в передней ее части. Балка 7 с копиром 8 может подниматься в транспортное положение посредством иарнира 9. Задний 18 Г 4-иЗГ X конец балки 7 шарнирно. соединен со штоком вспомогательного гидроцилинд- ра (ГЦ) 10, корпусом шарнирно соединенного с ползуном 1I. Последний установлен с вояможностьи вертикального перемещения по кронштейну 6. Полости ГЦ 10 соединены с гидропневматическими демпферами 13 и 14, а через регулируемые дроссели 15 и 16 и вентили 17 и 18 с камерами управления гид- роуправляемого трехпозиционного гидро- распределителя (ГР) 5. Дроссели 15 и 16 предотвращают случайные включения ГР 5 при передаче от копира 8 кратковременных высокочастотных управлякг щих воздействий. Посредством демпферов 13 и 14 предотвращается резкое повсшение давления в камерах управле кия ГР 5 и обеспечивается его включение в течение времени и диапазона перемещения поршня ГЦ 10. Путем взаимного перемещения корпуса ГЦ 10 и его поршня с помощью ползуна 11 произво дится настройка, системы управления планировгшка на ровной опорной поверхности. 1 -ил. / (Л IsD 00 со 12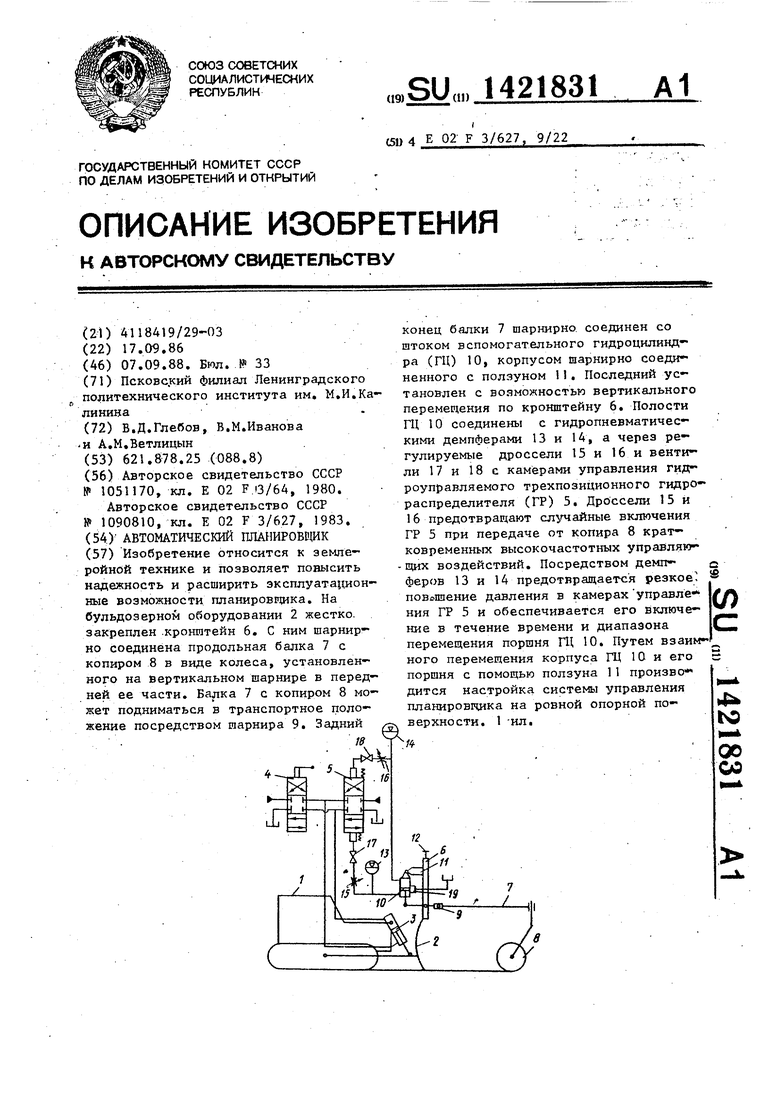
| Автоматический планировщик | 1980 |
|
SU1051170A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автоматический планировщик | 1983 |
|
SU1090810A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
