(54) ПЛАНИРОВОЧНАЯ МАШИНА
| название | год | авторы | номер документа |
|---|---|---|---|
| Прицепной длиннобазовый планировщик | 1980 |
|
SU941483A1 |
| Планировочная машина | 1974 |
|
SU506337A1 |
| Бульдозер-планировщик | 1990 |
|
SU1758176A1 |
| Гидропривод управления экскаваторным оборудованием | 1978 |
|
SU768896A1 |
| Гидропривод экскаватора | 1981 |
|
SU1028792A1 |
| Устройство для автоматическогопОддЕРжАНия зАдАННОй глубиНыХОдА РАбОчиХ ОРгАНОВ СЕльСКО-зяйСТВЕННОй МАшиНы | 1979 |
|
SU808022A1 |
| Прицепной планировщик | 1990 |
|
SU1789602A1 |
| Рабочее оборудование планировщика | 1986 |
|
SU1411391A1 |
| Скрепер газодинамического действия | 1982 |
|
SU1077993A1 |
| Роторный экскаватор для рытья траншей | 1959 |
|
SU131273A1 |
1
Изобретение относится к сельскохозяйственному и мелиоративному машиностроению, а именно к землеройным машинам послойного резания, в частности к машинам, предназначенным для планировки поверхности поля.
Известна планировочная машина, включающая тягач, раму, опирающуюся на передний и задний опорные мосты и рабочий орган, выполненный в виде ковша, неподвижный относительно рамы в работе 1.
Однако такая машина отличается большой металлоемкостью,плохой маневренностью и недостаточным качеством планировки на краях поля.
Известна также планировочная машина, включающая тягач, ковш, соединенный двуплечим рычагом с датчиком, задний опорный мост ковша с гидроцилиндром управления и гидросистему автоматического регулирования положением ковша с гидрораспределителем, связанным с двуплечим рычагом 2.
Недостатком известной машины является то, что ее гидросистема автоматического регулирования обеспечивает поддержание ковша на определенном расстоянии по
отношению к одной точке-полозу, являющемуся ее датчиком, копирующим рельеф поверхности поля. Поэтому нож ковша в работе описывает линию, эквидистантную рельефу поверхности, если не учитывать запаздывание в автоматической системе, и эффект планировки незначителен. Кроме того, наблюдается систематическое накопление погрешностей в положении планируемой в текущий момент поверхности по отношению к
10 первоначальной.
Цель изобретения - повышение качества планировки и улучшение маневренности.
Поставленная цель достигается тем, что ковш шарнирно соединен с тягачом, гидрораспределитель смонтирован на ковще, а
датчик выполнен в виде длиннобазовой балки с самоустанавливающимися колесами и направляющими роликами, при этом ковш имеет закрепленную на нем и пропущенную через направляющие ролики стойку, с которой с возможностью возвратно-поступательного перемещения соединен один из концов двуплечего рычага.
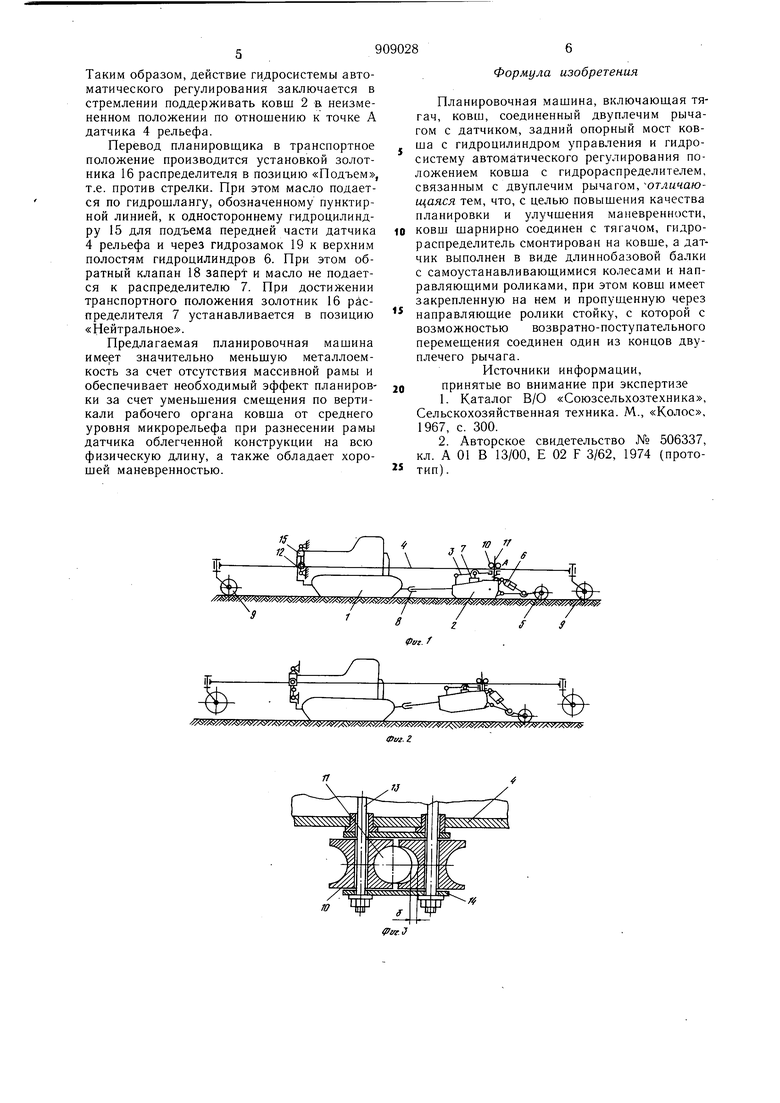
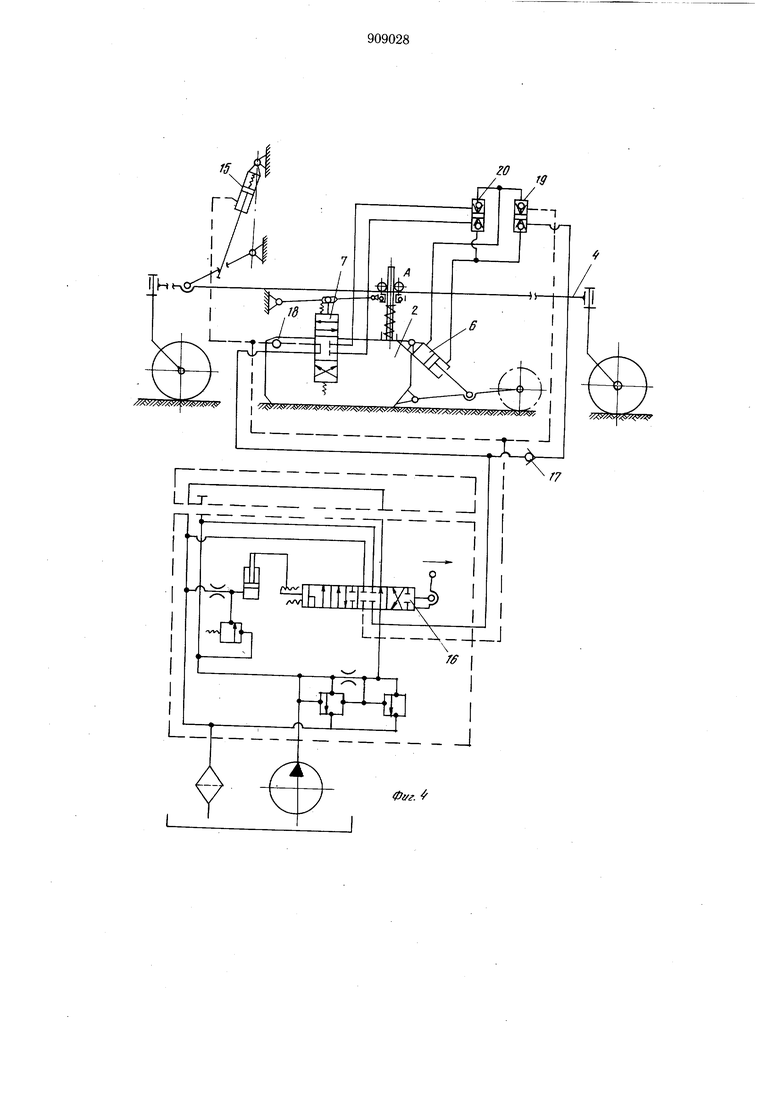
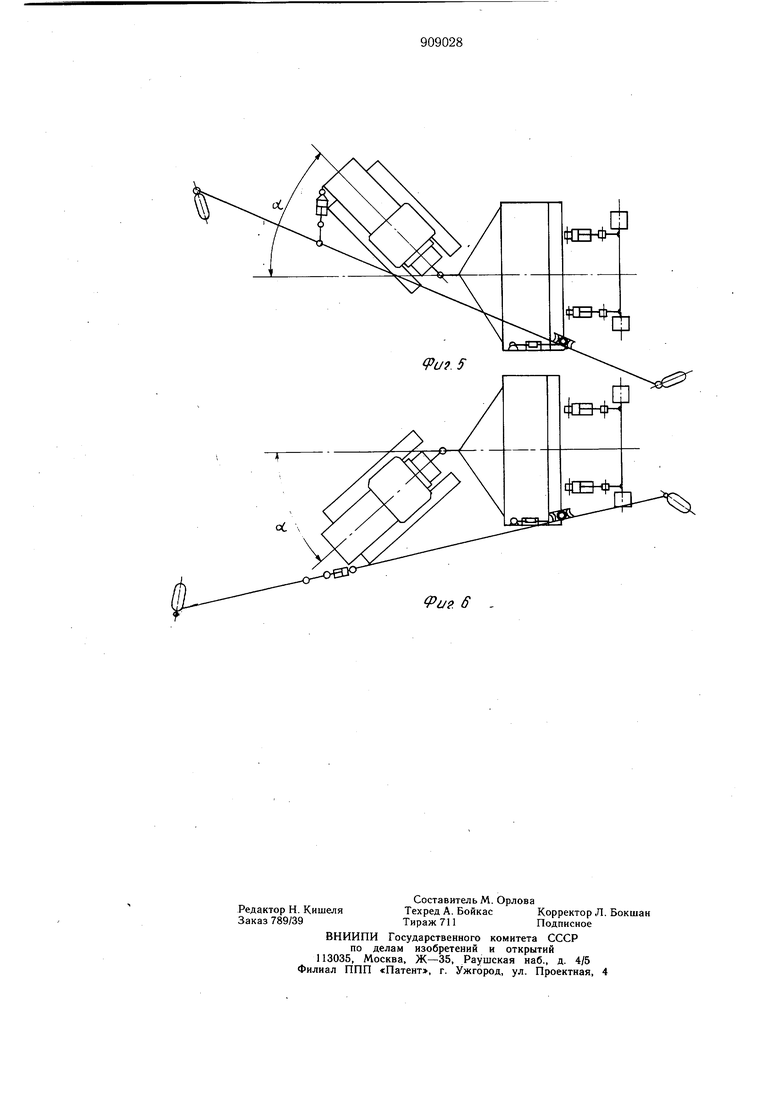
На фиг. 1 изображена планировочная машина, общий вид; на фиг. 2 - то же, в транспортном положении; на фиг. 3 - узел связи датчика со стойкой ковша; на фиг. 4 - гидросистема автоматического регулирования; на фиг. 5 - положение планировочной машины при повороте направо; на фиг. 6 - то же, при повороте налево. Планировочная машина включает тягач 1, ковш 2, соединенный двуплечим рычагом 3 с датчиком 4, задний опорный мост 5 ковша с гидроцилиндром 6 управления и гидросистему автоматического регулирования положением ковша с гидрораспределителем 7, связанным с двуплечим рычагом 3. Ковш 2 шарнирно соединен с тягачом путем опирания на точку прицепа 8. Гидрораспределитель 7 смонтирован на ковше, а датчик 4 выполнен в виде длиннобазовой балки с самоустанавливающимися колесами 9 и направляющими роликами 10, при этом ковш имеет закрепленную на нем и пропущенную через направляющие ролики стойку 11, с которой с возможностью возвратно-поступательного перемещения соединен один из концов двуплечего рычага. С тягачом датчик 4 соединен посредством тяги 12, имеющей на концах шаровые шарниры, и закрепленных на нем роликов 10, которые обеспечивают свободные вертикальные перемещения датчика 4. Выбором длины стойки 11, зазора б между стойкой 11 и роликами 10, свободно вращающихся на осях 13 и опирающихся сбоку на пластинки 14,и расположением датчика 4 по высоте в зависимости от рельефа поверхности обеспечивают перекос в продольной плоскости больше, чем возможные перекосы от копирования рельефа поля. Длина тяги 12 и расположение стойки И на ковще 2 таковы, что обеспечивают необходимое удаление датчика 4 от тягача 1 для свободы маневра при поворотах направо и налево. Рычаг 3, служащий для передачи вертикальных перемещений от точки А датчика 4 на гидрораспределитель 7 автоматической системы, корпус которого жестко закреплен на ковше планировочной машины, соединен подвижно со стойкой 11, Силовой гидроцилиндр 15 одностороннего действия также, как и силовые цилиндры 6 служит для подъема ковша 2 и датчика 4 в транспортное положение. Гидравлическая сиетема автоматического регулирования положения ковща планировщика включает в себя гидросистему трактора с золотником 16 гидрораспределителя, обратные клапаны 17, 18 и гидрозамки 19, 20 для запирания полостей цилиндров 6, служащих для регулировки глубины срезки в рабочем положении и в транспортном положении цилиндра 15, служащего совместно с цилиндрами 6 для перевода датчика 4 и ковша 2 в транспортное положение. Перевод планировщика в рабочее положение осуществляется установкой золотника 16 трактора в положение «Опускание (указанное стрелкой). При этом слив масла из гидроцилиндра 15 происходит под действием веса датчика 4 рельефа и возвратной пружины гидроцилиндра 15. От золотника 16 масло подается по гидрошлангу, обозначенному сплошной линией к гидрораспределителю 7. Планировочная машина работает следующим образом. При ее движении переднее самоустанавливающееся колесо 9 длиннобазового датчика 4 перемещается по неспланированной поверхности поля, копируя его рельеф, а заднее колесо 9 - по спланированной поверхности. При копировании передним опорным колесом 9 возвышенности датчик рельефа 4 тклоняет рычаг распределителя 7, переводя золотник 16 распределителя 7 в позицию Подъем. Масло подается через гидрозамок 20 в верхние полости гидроцилиндров 6. При этом происходит подъем ковша 2 до момента, пока золотник гидрораспределителя 7 не возвратится в нейтральное положение, соответствующее исходному заданному положению,ковша 2 по отношению к точке А датчика рельефа 4. В нейтральном положении распределителя 7 масло через обратный кяапан 18 уходит на слив. При этом обратный клапан 17 заперт. При копировании передним колесом 9 впадины относительно спланированной поверхности поля датчик 4 рельефа отклоняет рычаг распределителя 7, переводя его золотник в позицию «Опускание. Масло подается через г 1дрозамок в нижние полости гидроцилиндров 6. При .этом происходит опускание ковша 2 до момента, пока золотник гидрораспределителя 7 не возвратится на нейтральное положение, перекрыв доступ масла в гидроцилиндр 6. Аналогично происходит регулирование при копировании неровностей рельефа колесами заднего опорного моста 5. При копировании ими, например понижении или образовании более глубокой колеи, ковш с закрепленным на нем корпусом распределителя 7 перемещается вниз. Так как в начальный период заглубления точка А датчика 4 ПО вертикали неподвижна (предполагаем, что колеса 9 в этот момент движутся по ровной поверхности), то золотник распределителя 7 сместится вверх относительно его корпуса, открывая доступ масла в силовой ци. 6. Действие гидравлической системы автоматического регулирования таково, что она стремится .возвратить ковш 2 в первоначальное положение по отношению к датчику 4. Для указанного периода копирования поршень силового цилиндра 6 выдвигается, поднимая ковш 2 вверх до момента. пока золотник распределителя 7 не станет в нейтральное положение, перекрыв доступ масла в гидроцилиндр 6. Это произойдет при достижении первоначального положения ковша . 2 по отношению к датчику рельефа 4.
Таким образом, действие гидросистемы автоматического регулирования заключается в стремлении поддерживать ковш 2 в неизмененном положении по отношению к точке А датчика 4 рельефа.
Перевод планировш,ика в транспортное положение производится установкой золотника 16 распределителя в позицию «Подъем, т.е. против стрелки. При этом масло подается по гидрошлангу, обозначенному пунктирной линией, к одностороннему гидроцилиндру 15 для подъема передней части датчика 4 рельефа и через гидрозамок 19 к верхним полостям гидроцилиндров 6. При этом обратный клапан 18 sanept и масло не подается к распределителю 7. При достижении транспортного положения золотник 16 рйспределителя 7 устанавливается в позицию «Нейтральное.
Предлагаемая планировочная машина имеет значительно меньшую металлоемкость за счет отсутствия массивной рамы и обеспечивает необходимый эффект планировки за счет уменьшения смещения по вертикали рабочего органа ковша от среднего уровня микрорельефа при разнесении рамы датчика облегченной конструкции на всю физическую длину, а также обладает хорошей маневренностью.
Формула изобретения
Планировочная машина, включающая тягач, ковщ, соединенный двуплечим рычагом с датчиком, задний опорный мост ковша с гидроцилиндром управления и гидросистему автоматического регулирования положением ковша с гидрораспределителем, связанным с двуплечим рычагом,-огличающаяся тем, что, с целью повышения качества планировки и улучшения маневренности, ковщ шарнирно соединен с тягачом, гидрораспределитель смонтирован на ковше, а датчик выполнен в виде длиннобазовой балки с самоустанавливающимися колесами и направляющими роликами, при этом ковш имеет закрепленную на нем и пропущенную через направляющие ролики стойку, с которой с возможностью возвратно-поступательного перемещения соединен один из концов двуплечего рычага.
Источники информации, принятые во внимание при экспертизе 1. Каталог В/О «Союзсельхозтехника, Сельскохозяйственная техника. М., «Колос,
1967, с. 300.
2 Авторское свидетельство № 506337, кл. А 01 В 13/00, Е 02 F 3/62, 1974 (прототип).
.,
Фаг. г. I .PWQ /5 i55i I i
Г
ьСтГГ
П
/%Л
s
L.4-J
.
