Известны автоматы для укладки цилиндрических предметов в ящики, состоящие из устройства подачи предметов, механизма формирования из них рядов, толкателя ряда предметов, подъемно-опускного стола с двумя боковыми стенками, служащего для формирования стопы из рядов предметов, толкателя для перемещения стопы в ящик и устройства для иодачи ящиков, установки их против толкателя открытой стороной и отвода ящиков с предметами.
С целью укладки легко деформируемых предметов, например туб, в предлагаемом автомате боковые стенки подъемно-опускного стола укреплены над последним неподвил но, а под ними расположены сходящиеся и расходящиеся между собой пластины, служащие для снятия со стола ряда предметов в момент его опускания под загрузку, набора и удержания рядов в виде стопы между боковыми стенками. Кроме того, в столе, с двух его противоположных сторон, сделаны вырезы и под ним горизонтально расположена подвижная в противоположные стороны планка с загнутыми кверху под прямым углом концами, размещенными в вырезах стола. Для предотвращения произвольного смещения нижнего ряда туб в формируемой стопе над пластинами в прорезях боковых стенок стола установлены поворотные фиксаторы, выполненные в виде
двух эллиптических кулачков, разность между полуосями которых равна половине диаметра тубы. Автомат снабжен устройством для отбраковки туб без колпачков, представляющим собой установленную на пути движения туб вертущку с гнездами для них, имеющую храповой электромагнитный привод, управляемый электроконтактным щупом наличия колпачка на тубе. Устройство для подачи ящиков, установки их против тoлкaтev я открытой стороной и отвода ящиков с предметами выполнено в виде двух параллельно установленных транспортеров - горизонтального, подающего, и наклонного, отводящего, - и перпендикулярно установленного к ним и соединяющего их промежуточного транспортера.
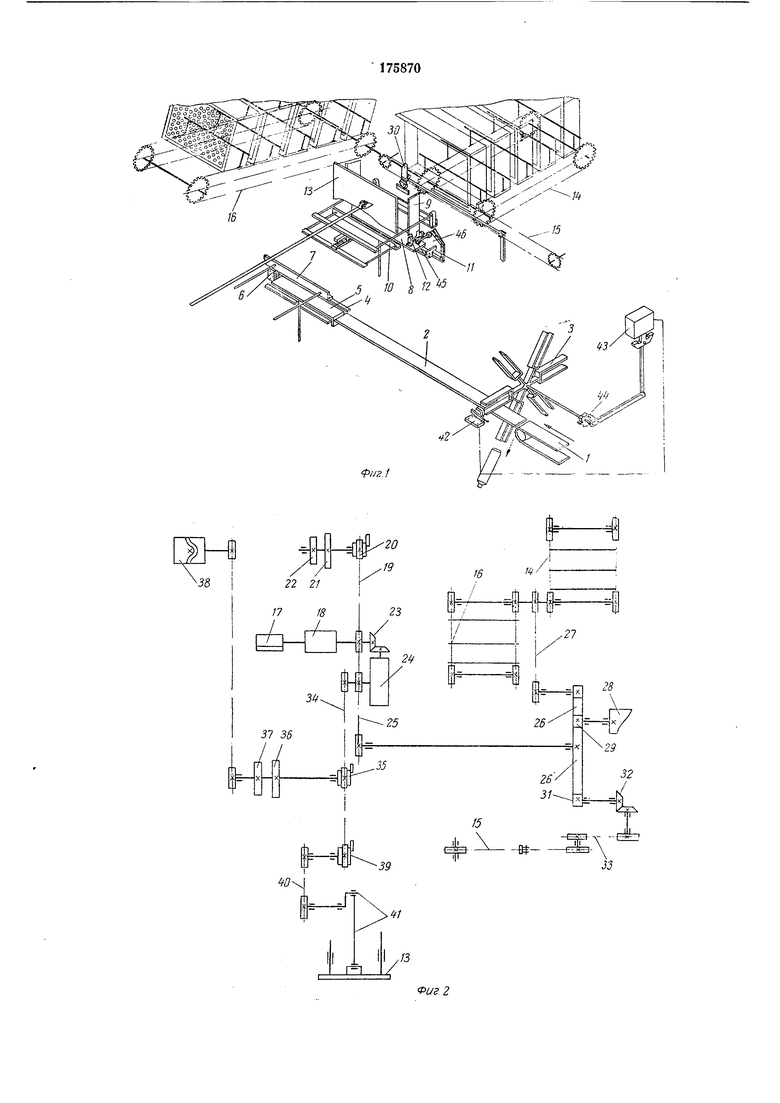
На фиг. 1 схематично изображен предлагаемый автомат; на фиг. 2 - его кинематическая схема; на фиг. 3 - узел формирования
стопы из рядов предметов.
Автомат для укладки цилиндрических предметов в ящики состоит из транспортера / подачи предметов; приемного стола 2; вертущки 3 для отбраковки туб без колпачков; механизма формирования рядов туб, включающего направляющие 4, подъемно-опускной стол 5, микропереключатель 6 и толкатель 7; подъемно-опускного стола 8, служащего для формирования стопы из рядов предметов, с двумя лом пеподвижно; сходящихся и расходящихся между собой пластии 10, служащих для снятия со стола 8 ряда предметов в момент его опускания под загрузку, набора и удержания рядов в виде стопы между боковыми стенками 9; подвижной в противонолол ные стороны в горизонтальной плоскости планки // с загпутыми кверху под прямым углом концами; поворотных фиксаторов 12, установленных в прорезях боковых стенок 9; толкателя 13 для перемещения стопы туб в ящик; транспортера 14 для подачи ящиков, установки их против толкателя 13 открытой стороной; транспортера 15, перпендикулярно установленного к транспортеру 14, и транспортера 16 для отвода ящиков с предметами, параллельно установленного к транспортеру 14 и имеющего паклон к горизонтальной плоскости для предотвращения выпадания туб пз ящиков. Автомат приводится от электродвигателя 17 через цилиндрический редуктор 18. Посредством цепной передачи 19 приводится во вращение однооборотная муфта 20, приводящая во вращение кулачок 21 для приведения в действие подъемно-опускного стола 5 и кулачок 22 для приведения в действие толкателя 7. С помощью конической зубчатой передачи 23 приводится в действие червячный редуктор 24. Последний посредством цепной 25, зубчатой 26 и цепной 27 передач приводит в действие транспортеры 14 и 16. При помощи кулачка 28, сидящего па валу зубчатого колеса 29, приводится устанавливающий уиор 30 для ящиков. От зубчатого колеса 31 посредством конической 32 и цепной 55 передач приводится трапспортер 15. От червячного редуктора 24 носредством ценной передачи 34, однооборотной муфты 55 приводятся кулачок 36, взаимодействующий со щтоком подъемно-опускного стола 8, и кулачок 37, взаимодействующий с рычажной системой пластин 10. От кулачка 38 приводится планка 11. Толкатель 13 приводится от одмооборотной муфты 59 при помощи цепной передачи 40 и крнвощпппо-щатунного механизма 41. Тубы поступают по транспортеру 1. При отсутствии колпачка на тубе, попавшей в контрольное гнездо вертущки 3, электроконтактный щуп 42 передает сигнал электромагниту 43, который втягивает свой якорь, в результате чего храповой механизм 44 поворачивает вертущку 3, и туба без колпачка, находящаяся в гнезде, удаляется. Пабраппый ряд туб толкателем 7 передается на подъемно-опускной стол 8, при подъеме которого пластины 10 расходятся, а при опускапии сходятся и удерживают тубы. С двух противоположпых сторон стола S сделаны вырезы, в которых размещаются концы плапки 11, смещающей каждый ряд туб относительно нредыдущего на половину диаметра тубы. Для предотвращения произвольного смещения иижнего ряда туб в формируемой стопе имеются поворотные фиксаторы 12, выполиенные в виде двух эллиптических кулачков, разность между полуосями которых равпа половине диаметра тубы. Эти эллиптические кулачки приводятся во вращение с помощью зубчатой передачи 45 и храпового механизма 46 от планки 11. После набора стопы туб толкатель 13 перемещает ее в яи1;ик, зафиксированный упором 30 открытой сторо JQQ против толкателя 13. Предмет изобретения 1. Автомат для укладки цилиндрических предметов в ящики, состоящий из устройства подачи предметов, механизма формирования из них рядов, толкателя ряда предметов, подъемно-опускного стола с двумя боковыми стенками, служащего для формирования стопы из рядов предметов, толкателя для перемещения стопы в ящик и устройства для подачи ящиков, установки их против толкателя открытой стороной и отвода ящиков с предметами, отличающийся тем, что, с целью укладкп легко деформируемых предметов, например туб, боковые стенки подъемно-опускного стола укреплены над последним неподвижно, а под ними расположены сходящиеся и расходящиеся между собой пластины, служащие для спятия со стола ряда предметов в момент его опускания под загрузку, набора и удержания рядов в виде стопы между боковыми стенками, а в столе, с двух его противоположных сторон, сделаны вырезы и под ним горизонтально расположена подвижная в противоположные стороны плапка с загнутыми кверху под прямым углом концами, размещеипыми в вырезах стола. 2.Автомат по п. 1, отличающийся тем, что, с целью предотвращеиия произвольного смещения нижнего ряда туб в формируемой стопе, пад пластинами в прорезях боковых стенок стола установлены новоротпые фиксаторы, выполнеиные в виде двух эллиптических кулачков, разность между полуосями которых равпа половине диаметра . 3.Автомат по п. 1, отличающийся тем, что он снабжен устройством для отбраковки туб без колпачков, выполпенным в виде установленной на пути движения туб вертущки с гнездами для них, имеющей храповой электромагнитный привод, управляемый электроконтактным щупом наличия колпачка на тубе. 4.Автомат по п. 1, отличающийся тем, что устройство для подачи ящиков, установки их против толкателя открытой стороной и отвода ящиков с предметами выполнено в виде двух параллельно установленных транспортеров - горизонтального, подающего, и наклонного, отводящего, - и перпендикулярно установлениого к ним, соединяющего их промежуточпого транспортера.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для укладки штучныхиздЕлий B ТАРу | 1979 |
|
SU839866A1 |
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |
| Устройство для дистанционного контроля и счета ящиков с заполненными бутылками | 1959 |
|
SU122644A1 |
| РОТОРНЫЙ АВТОМАТ ДЛЯ ПРЕССОВАНИЯ ИЗДЕЛИЙ ИЗ ПОРОШКОВЫХ МАТЕРИАЛОВ | 1972 |
|
SU341683A1 |
| Автомат для укладки бутылок в ящики рядами | 1957 |
|
SU112558A1 |
| УСТРОЙСТВО ДЛЯ НАБОРА ПРЯМОУГОЛЬНЫХ ПРЕДМЕТОВВ СТОПУ | 1966 |
|
SU189735A1 |
| ЗАВЕРТЫВАНИЯ в БУМАГУ ШТУЧНЫХПРЕДМЕТОВ | 1968 |
|
SU221555A1 |
| МАШИНА ДЛЯ ЗАВЕРТКИ ШТУЧНЫХ ПРЕДМЕТОВ В МЯГКИЙ ОБЕРТОЧНЫЙ МАТЕРИАЛ | 1967 |
|
SU196599A1 |
| Автомат для укладки плодов | 1960 |
|
SU134622A1 |
| Автомат для садки кирпича на печные вагонетки | 1983 |
|
SU1104023A1 |

Г
1/
-27
2В
29
32
263115
Л
-й38
Физ.З
