Изобретение относится к электротехнике и может быть использовано для определения параметров асинхронных электродвигателей.
Известен способ определения параметров и рабочих характеристик асинхронного двигателя без сопряжения с нагрузочным устройством [RU 2391680 C1, МПК G01R 31/34 (2006.01), опубл. 10.06.2010], выбранный в качестве прототипа, заключающийся в том, что потребляемую мощность, напряжение и ток в режиме холостого хода измеряют и регистрируют при номинальном напряжении или близком к нему, вычисляют по ним коэффициент мощности и индуктивное сопротивление статора, затем отключают двигатель от источника питания, регистрируют скачок напряжения статора, кривую затухания напряжения статора и измеряют сопротивление статора r1. По скачку напряжения, току, измеренному до отключения, коэффициенту мощности и сопротивлению фазы вычисляют реактивное сопротивление рассеяния x1 статора. По кривой затухания определяют постоянные времени T0 и T′ ротора соответственно при разомкнутом статоре и статоре, условно включенном на сеть бесконечно большой мощности. С использованием полученных значений рассчитывают коэффициенты рассеяния σ1 и σ2 статора и ротора, реактивное сопротивление взаимоиндукции X12, приведенное к статору реактивное сопротивление рассеяния 
Недостатком известного способа является то, что для его осуществления необходимо измерять потребляемую мощность, напряжение и ток в режиме холостого хода.
Задачей изобретения является расширение арсенала средств аналогичного назначения.
Это достигается тем, что способ определения параметров асинхронного электродвигателя, также как в прототипе, заключается в измерении потребляемых асинхронным электродвигателем токов и напряжений и определении активного сопротивления обмотки статора и постоянной времени ротора.
Согласно изобретению в течение пуска и работы асинхронного электродвигателя одновременно измеряют мгновенные величины токов и напряжений на двух фазах статора асинхронного электродвигателя при напряжении питания асинхронного электродвигателя ниже номинального значения, при котором ротор асинхронного электродвигателя остается неподвижным. Измеренные мгновенные величины токов и напряжений преобразуют из естественной координатной системы в прямоугольную стационарную систему координат. Последовательно выполняют три временные задержки преобразованных токов и напряжений асинхронного электродвигателя. Полученные значения запоминают и используют для определения активного сопротивления обмотки статора, постоянной времени ротора, эквивалентных постоянной времени и активного сопротивления асинхронного электродвигателя:
 ,
,  ,
,  , Rэ=К1·К4-К2.
, Rэ=К1·К4-К2.
где R1 - активное сопротивление обмотки статора, Ом;
T2 - постоянная времени ротора, с;
Tэ - эквивалентная постоянная времени асинхронного электродвигателя, с;
Rэ - эквивалентное активное сопротивление асинхронного электродвигателя, Ом;
K1, K2, K3, K4 - коэффициенты, определенные методом наименьших квадратов.
Коэффициенты K1, K2, K3, K4 определяют методом наименьших квадратов из выражения:
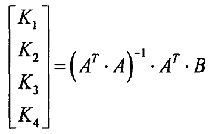 ,
,
где 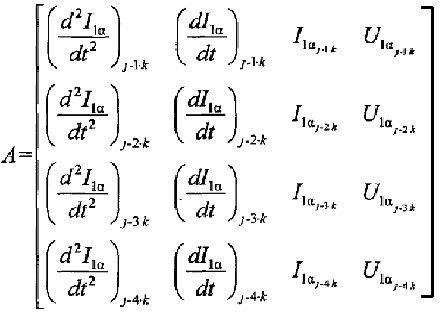 ;
;
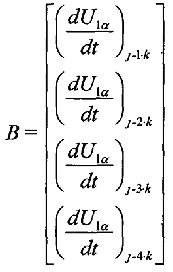 ;
;
k - коэффициент временной задержки.
Предложенный способ, в отличие от прототипа, позволяет одновременно определять электромагнитные параметры асинхронного электродвигателя в реальном времени, без необходимости проведения измерений в режиме холостого хода и отключения двигателя.
На фиг. 1 представлена схема устройства, реализующего способ определения параметров асинхронного электродвигателя.
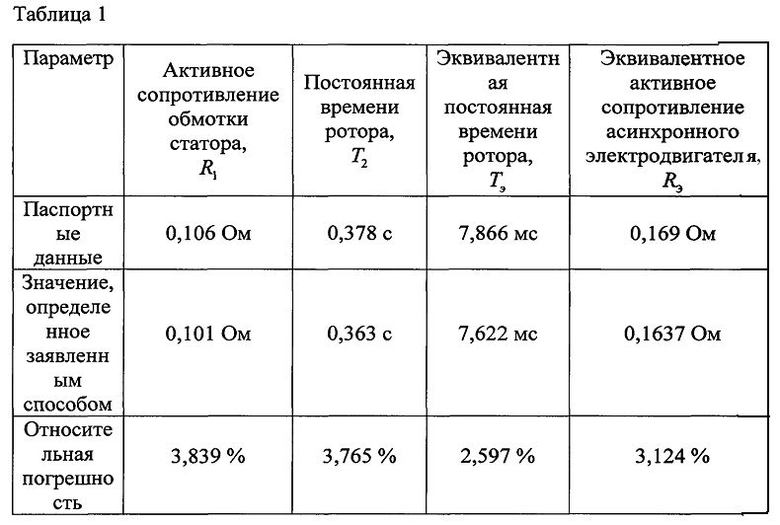
В таблице 1 приведены параметры асинхронного электродвигателя, определенные по заявленному способу.
Способ определения параметров асинхронного электродвигателя осуществлен с помощью устройства (фиг. 1), в котором датчики фазных токов 1 (ДТ1), 2 (ДТ2) и датчики фазных напряжений 3 (ДН1), 4 (ДН2) подключены к двум фазам питания асинхронного электродвигателя. К датчикам токов 1 (ДТ1), 2 (ДТ2) и датчикам напряжения 3 (ДН1), 4 (ДН2) последовательно подключены преобразователь координат 5 (ПК), первый блок временной задержки 6 (БВЗ1), второй блок временной задержки 7 (БВЗ2), третий блок временной задержки 8 (БВЗ3), блок памяти 9 (БП), блок определения кооэффициентов 10 (БОК), блок определения параметров 11 (БОП). Блок памяти 9 (БП) соединен с преобразователем координат 5 (ПК), первым блоком временной задержки 6 (БВЗ1), вторым блоком временной задержки 7 (БВЗ2). Управляющие входы блока памяти 9 (БП), блока определения коэффициентов 10 (БОК) и блока определения параметров асинхронного электродвигателя 11 (БОП) соеденены с системой управления асинхронного электродвигателя (не показано на фиг. 1). Блок определения параметров асинхронного электродвигателя 11 (БОП) связан с ЭВМ (не показано на фиг. 1).
В качестве датчиков фазных токов 1 (ДТ1), 2 (ДТ2) использованы датчики тока - промышленный прибор КЭИ-0,1, в качестве датчиков фазных напряжений 3 (ДН1), 4 (ДН2) - датчики напряжения LEM. Преобразователь координат 5 (ПК), первый блок временной задержки 6 (БВЗ1), второй блок временной задержки 7 (БВЗ2), третий блок временной задержки 8 (БВЗ3), блок памяти 9 (БП), блок определения коэффициентов 10 (БОК), блок определения параметров 11 (БОП) и система управления асинхронным двигателем выполнены на базе микроконтроллера типа TMS320C28346 фирмы Texas Instruments.
Для проверки работоспособности предложенного способа определения параметров асинхронного электродвигателя датчики фазных токов 1 (ДТ1), 2 (ДТ2) и датчики фазных напряжений 3 (ДН1), 4 (ДН2) подключили к двум фазам питания асинхронного электродвигателя (f1н=50 Гц, U1н=27 B, zp=2, ω0=157 рад/с). В течение пуска и работы асинхронного электродвигателя одновременно измерили мгновенные величины токов и напряжений на двух фазах статора асинхронного электродвигателя. Мгновенные величины токов и напряжений передали в преобразователь координат 5 (ПК), где их преобразовали в мгновенные величины токов и напряжений в прямоугольной стационарной системе координат (фиг. 2). Мгновенные величины токов, напряжений в прямоугольной стационарной системе координат асинхронного электродвигателя передали на блоки временной задержки 6-8 (БВЗ1-БВЗ3), где последовательно выполнили три временные задержки мгновенных величин токов, напряжений в прямоугольной стационарной системе координат асинхронного электродвигателя на 500·10-6 секунд и получили текущие задержанные единожды, дважды и трижды значения токов и напряжений в прямоугольной стационарной системе координат асинхронного электродвигателя. Полученные текущие и задержанные единожды, дважды и трижды мгновенные величины токов в прямоугольной стационарной системе координат 



















В момент включения в сеть асинхронного электродвигателя система управления подает на управляющий вход блока памяти 9 (БП) сигнал о пуске асинхронного электродвигателя, по этому сигналу в течение пуска и работы асинхронного электродвигателя с временной задержкой начали запись величин токов и напряжений в прямоугольной стационарной системе координат. Одновременно в момент включения в сеть асинхронного электродвигателя система управления подает сигнал на управляющие входы блока определения коэффициентов 10 (БОК) и блок определения параметров 11 (БОП). Передачу сигналов с блока памяти 9 (БП) на блок определения коэффициентов 10 (БОК) осуществили с временной задержкой, равной 500·10-6 секунд. В блоке определения коэффициентов 10 (БОК) определили коэффициенты K1, K2, K3, K4 методом наименьших квадратов [Метод наименьших квадратов и основы математико-статической теории обработки наблюдений / Ю.В. Линник. - Государственное издательство физико-математической литературы, 1958. С. 152-157] из выражения:
,
где ;
;
k - коэффициент временной задержки.
Полученные коэффициенты K1, K2, K3, K4 передали на блок определения параметров 11 (БОП), где определили активное сопротивление обмотки статора, постоянную времени ротора, эквивалентные постоянную времени и активное сопротивление асинхронного электродвигателя в реальном времени следующим образом:
, , , Rэ=K1·K4-K2.
где R1 - активное сопротивление обмотки статора, Ом;
T2 - постоянная времени ротора, с;
Tэ - эквивалентная постоянная времени асинхронного электродвигателя, с;
Rэ - эквивалентное активное сопротивление асинхронного электродвигателя, Ом;
K1, K2, K3, K4 - коэффициенты, определенные методом наименьших квадратов.
Результаты определения параметров поступают на ЭВМ (таблица 1).
Проверку правильности определения параметров асинхронного электродвигателя осуществляли путем сравнения определенных значений параметров асинхронного электродвигателя с реальными значениями параметров, указанных в паспортных данных асинхронного электродвигателя (таблица 1). Определили относительную погрешность между реальными значениями параметров асинхронного электродвигателя и параметрами, найденными заявленным способом. Относительная погрешность каждого из параметров составила менее 4%, что является допустимым в электроприводах общего назначения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2014 |
|
RU2570363C1 |
| СПОСОБ ОПТИМАЛЬНОЙ ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННОГО ДВИГАТЕЛЯ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2385529C1 |
| СПОСОБ ПОЛУЧЕНИЯ СИГНАЛА ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА И СИГНАЛА ОЦЕНКИ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2024 |
|
RU2832962C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2502079C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2019 |
|
RU2705939C1 |
| СПОСОБ ПОЛУЧЕНИЯ СИГНАЛА ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА И СИГНАЛА ОЦЕНКИ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ АСИНХРОННОГО ДВИГАТЕЛЯ | 2023 |
|
RU2822608C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРОДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА | 2019 |
|
RU2718708C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ СИГНАЛА ОЦЕНКИ ЧАСТОТЫ ВРАЩЕНИЯ РОТОРА И СИГНАЛА ОЦЕНКИ МОМЕНТА СОПРОТИВЛЕНИЯ НА ВАЛУ СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2024 |
|
RU2825800C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ТРЕХФАЗНОГО АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2013 |
|
RU2525604C1 |
Изобретение относится к электротехнике и может быть использовано для определения параметров асинхронных электродвигателей. Способ заключается в том, что в течение пуска и работы асинхронного электродвигателя одновременно измеряют мгновенные величины токов и напряжений на двух фазах статора асинхронного электродвигателя при напряжении питания асинхронного электродвигателя ниже номинального значения, при котором ротор электродвигателя остается неподвижным. Измеренные мгновенные величины токов и напряжений преобразуют из естественной координатной системы в прямоугольную стационарную систему координат. Последовательно выполняют три временные задержки преобразованных токов и напряжений асинхронного электродвигателя. Полученные значения запоминают и используют для определения активного сопротивления обмотки статора, постоянной времени ротора, эквивалентных постоянной времени и активного сопротивления асинхронного электродвигателя. Технический результат заключается в возможности определять параметры асинхронного электродвигателя в реальном времени. 1 з.п. ф-лы, 1 ил., 1 табл.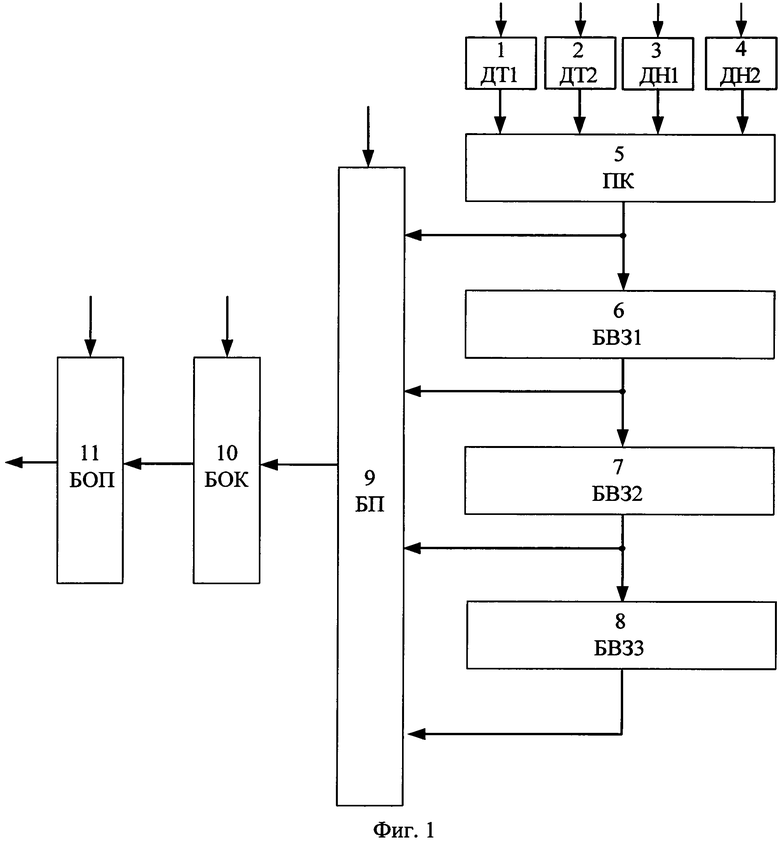
1. Способ определения параметров асинхронного электродвигателя, включающий измерение потребляемых асинхронным электродвигателем токов и напряжений и определение сопротивления статора, постоянной времени ротора, отличающийся тем, что в течение пуска и работы асинхронного электродвигателя одновременно измеряют мгновенные величины токов и напряжений на двух фазах статора асинхронного электродвигателя при напряжении питания асинхронного электродвигателя ниже номинального значения, при котором ротор асинхронного электродвигателя остается неподвижным, измеренные мгновенные величины токов и напряжений преобразуют из естественной координатной системы в прямоугольную стационарную систему координат, последовательно выполняют три временные задержки преобразованных токов и напряжений асинхронного электродвигателя, полученные значения запоминают и используют для определения активного сопротивления обмотки статора, постоянной времени ротора, эквивалентных постоянной времени и активного сопротивления асинхронного электродвигателя:

где R1 - активное сопротивление обмотки статора, Ом;
T2 - постоянная времени ротора, с;
Тэ - эквивалентная постоянная времени асинхронного электродвигателя, с;
Rэ - эквивалентное активное сопротивление асинхронного электродвигателя, Ом;
К1, К2, К3, К4 - коэффициенты, определенные методом наименьших квадратов.
2. Способ по п. 1, отличающийся тем, что коэффициенты К1, К2, К3, К4 определяют методом наименьших квадратов из выражения:
где 
k - коэффициент временной задержки.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ И РАБОЧИХ ХАРАКТЕРИСТИК АСИНХРОННОГО ДВИГАТЕЛЯ БЕЗ СОПРЯЖЕНИЯ С НАГРУЗОЧНЫМ УСТРОЙСТВОМ | 2008 |
|
RU2391680C1 |
| Устройство для определения параметров асинхронного электродвигателя | 1991 |
|
SU1802347A1 |
| ТЕРМОСТАТИЧЕСКИЙ НАСОС | 2010 |
|
RU2418993C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2012 |
|
RU2502079C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОТОКОСЦЕПЛЕНИЯ СТАТОРА АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2439599C1 |
| Устройство для определения параметров асинхронных электродвигателей | 1987 |
|
SU1468211A1 |

