Изобретение относится к приборостроению и найдет применение при определении свойств сыпучего материала.
Известен способ определения сил сопротивления извлечению тел из сыпучего материала, заключающийся в укладывании тела на горизонтальную поверхность, покрытии его слоем сыпучего материала, извлечении тела из слоя сыпучего материала при помощи противовеса и регистрации максимального значения величины силы сопротивления 1. Устройство для реализации данного способа содержит емкость и тело, соединенное гибкой тягой с блоком измерения, состоящим из лабораторных весов и груза 1.
Недостатком данного способа и устройства заключаются в том, что они не дают возможности получить значения сил сопротивления движению тел при их перемещении через весь слой сыпучего материала, так как измеряют лишь силу, при которой тело начинает движение в слое сыпучего материала.
Наиболее близким к предложенному способу определения сил сопротивления извлечению тел из сыпучего материала является способ, при котором тело соединяют гибкой связью с силоизмерительным датчиком, перемещают тело в сыпучем материале и регистрируют показания силоизмеритель- ного датчика 2.
о о о о
К предложенному устройству для определения сил сопротивления извлечению тел из сыпучего материала наиболее близким является устройство, содержащее размещенные на основании П-образную раму, привод с редуктором и барабанами с гибкими элементами, охватывающими блоки, закрепленные на перекладине П-образной рамы, силоизмерительный датчик, связанный с исследуемым телом, усилитель, подключенный к силоизмерительному датчику, и регистрирующим прибор 3.
С помощью указанных способа и устройства невозможно с высокой точность определять силы сопротивления, так как они не позволяют ос/вществлять регистрацию временных и пространственных координат, а регистрацию силовой характеристики з установившемся режиме движения обеспечивают только на части пути движения тела в исследуемой среде.
Цель изобретения - повышение точности измерений.
Цель достигается тем, что по способу определения сил сопротивления извлечению тел из сыпучего материала, по которому тело соединяют гибкой связью с силоизме- рительным датчиком, перемещают тело в сыпучем материале и регистрируют показания смлоизмерительного датчика, силоизмерительный датчик закрепляют на инерционной массе, при неподвижном теле разгоняют инерционную массу до установившейся заданной скорости в направлении извлечения тела, после чего сообщают движение с заданной скоростью телу, при этом показания силоизмерительного датчика регистрируют во времени и одновременно регистрируют положение тела в сыпучем материале.
В устройство для определения сил сопротивления извлечению тел из сыпучего материала, содержащее размещенные на основании П-образную раму, привод с редуктором и барабанами с гибким элементами, охватывающими блоки, закрепленные на переколадине П-образной рамы, силоизмерительный датчик, связанный с доследуемым телом, усилитель, подключенный к силоизмерительному датчику, и per -стриру- ющий прибор, введены инерционная масса, соединенная с гибкими элементами и с си- лоизмерительным датчиком, и расположенный под блоками на основании бункер с датчиком страгивания на его дне, при этом регистрирующий прибор выполнен самопи- щущим с двумя каналами, к одному из которых подключен датчик страгивания, а другой связан с усилителем.
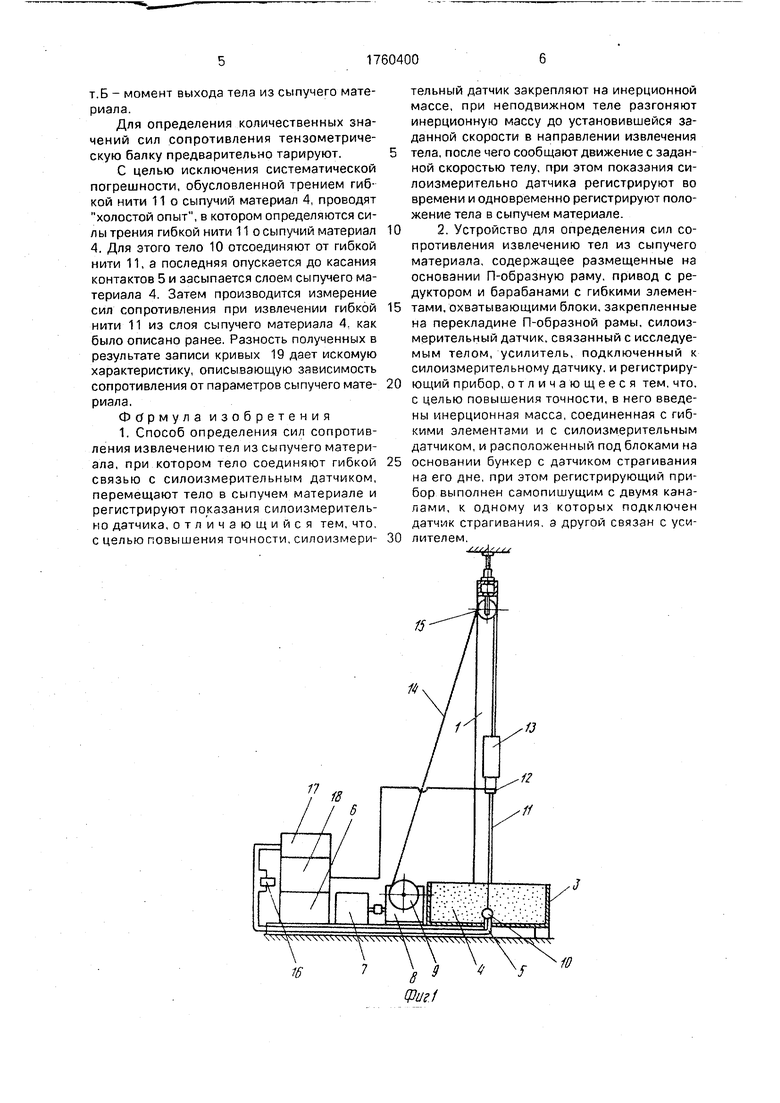
На фиг. 1 представлено устройство, общий вид; на фиг. 2 - устройство вид сбоку; на фиг. 3 - фрагмент диаграммы самописца. Устройство содержит раму 1, зафиксированную распорными винтами 2. На раме установлен бункер 3 с сыпучим материалом 4. В нижней части бункера 3 расположены контакты 5 датчика страгивания. На раме смонтированы также блок 6 управления
0 приводом, электродвигатель 7 с редуктором 8 и барабанами 9. Тело 10 соединено гибкой нитью 11 с тензометрической балкой 12, которая жестко соединена с грузом 13 (масса которого, например, в 10 раз превышает
5 максимальное значение сил сопротивления), подвешенным на тросах 14. Тросы 14, огибая ролики 15 закрепленные в верхней части рамы 1, наматываются на барабаны 9, Кроме того, устройство содержит источник
0 16 питания, подключенный к контактам 5 и самописцу 17, и усилитель 18, подключенный к танзометрической балке 12 и само- писиу 17
Способ осуществляют следующим об5 разом.
Управляя электродвигателем 7 с помощью блока 6 управления приводом, опускают на тросах 14 груз 13 с тензометрической балкой 12 и телом 10 в начальное положение.
0 При этом гибкая нить 11 находится в натянутом состоянии, а тело 10 замыкает контакты 5 В этом положении бункер 3 заполняют слоем сыпучего материала 4. Груз 13 с тензометрической балкой 12 опускают в исходное положе5 ние. Затем с помощью блока 6 управления приводом задают скорость подъема и включают на реверс двигатель 7. Груз 13 с рической балкой 12 поднимается в верхнее положение с постоянной скоростью, В момент
0 начала движения тела 10 разм ы каются конта к- ты 5, разрывая электрическую цепь из источника 16 питания и самописца 17 (что оставляет отметку на диаграмме одного из каналов самописца 17). Значения сил сопротивления пол5 учают при помощи сигнала тензомегрической балки, поступающего в усилитель 18 и регистрируемого другим каналом самописца. омгакт тела 10 с сыпучим материалом 4 отмечается на том же канале самописца 17
0 что и момент начала движения. В момет выхода тела 10 из сыпучего материала 4 указанный канал самописца 17 отключается. Так как запись сигналов, регистрирующихся самописцем, ведется параллельно по
5 двум каналам, то в результате одного измерения получают диаграммуу, представленную на фиг. 3, где сила сопротивления представлена кривой 19, а контакт тела- представителя 10 и сыпучего материала 4 - кривой 20, где т.А - начало движения тела
т Б момент выхода тела из сыпучего материала.
Для определения количественных значений сил сопротивления тензометриче- скую балку предварительно тарируют.
С целью исключения систематической погрешности, обусловленной трением гибкой нити 11 о сыпучий материал 4, проводят холостой опыт, в котором определяются силы трения гибкой нити 11 о сыпучий материал 4. Для этого тело 10 отсоединяют от гибкой нити 11, а последняя опускается до касания контактов 5 и засыпается слоем сыпучего материала 4. Затем производится измерение сил сопротивления при извлечении гибкой нити 11 из слоя сыпучего материала 4. как было описано ранее. Разность полученных в результате записи кривых 19 дает искомую характеристику, описывающую зависимость сопротивления от параметров сыпучего материала.
Формула изобретения 1. Способ определения сил сопротивления извлечению тел из сыпучего материала, при котором тело соединяют гибкой связью с силоизмерительным датчиком, перемещают тело в сыпучем материале и регистрируют показания силоизмеритель- но датчика, отличающийся тем, что, с целью повышения точности, силоизмериг
4N 4 X 4 VN NX N N VV4NN N N
.
Лдр
16
тельный датчик закрепляют на инерционной массе, при неподвижном теле разгоняют инерционную массу до установившейся заданной скорости в направлении извлечения 5 тела, после чего сообщают движение с заданной скоростью телу, при этом показания си- лоизмерительно датчика регистрируют во времени и одновременно регистрируют положение тела в сыпучем материале. 10 2. Устройство для определения сил сопротивления извлечению тел из сыпучего материала, содержащее размещенные на основании П-образную раму, привод с редуктором и барабанами с гибкими элемен- 15 тами, охватывающими блоки, закрепленные на перекладине П-образной рамы, силоиз- мерительный датчик, связанный с исследуемым телом, усилитель, подключенный к силоизмерительному датчику, и регистриру- 20 ющий прибор, отличающееся тем, что. с целью повышения точности, в него введены инерционная масса, соединенная с гибкими элементами и с силоизмерительным датчиком, и расположенный под блоками на 25 основании бункер с датчиком страгивания на его дне, при этом регистрирующий прибор выполнен самопишущим с двумя каналами, к одному из которых подключен датчик страгивания, а другой связан с уси- 30 лителем.
VN NX N N VV4NN N N
.
Лдр
8 Фиг1
s//////////////////// //////////////и/
w
vtt
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения сил сопротивления движению тела в сыпучем потоке и устройство для его осуществления | 1990 |
|
SU1781567A1 |
| ДОЗАТОР | 1990 |
|
RU2027151C1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2079117C1 |
| Способ извлечения ферромагнитных включений из потока сыпучего материала | 1990 |
|
SU1768301A1 |
| Динамометр для измерения сил резания | 1990 |
|
SU1732194A1 |
| СЕЛЕКЦИОННЫЙ КОМБАЙН С УСТРОЙСТВОМ ДЛЯ УЧЕТА СОБРАННОЙ МАССЫ | 1992 |
|
RU2045149C1 |
| Устройство для аэродинамических испытаний силовых установок летательных аппаратов | 2023 |
|
RU2825165C1 |
| Устройство для контроля содержания классов крупности в потоке сыпучего материала | 1978 |
|
SU744283A1 |
| Установка для определения деформации порошков | 1982 |
|
SU1089394A1 |
| Весоизмерительное устройство | 1988 |
|
SU1509614A1 |
Изобретение относится к приборостроению. Цель изобретения - повышение точности. Тело 10 соединяют гибкой нитью 11 с силоизмерительным датчиком 12. Датчик 12 закрепляют на инерционной массе 13, соединенной гибкими-элементэми 14, охватывающими блоки 15, с барабанами 9, связанными с редуктором 8 привода. При неподвижном теле 10, взаимодействующем с датчиком 5 страгивания, расположенным на дне бункера 3, наполненного сыпучим материалом 4 и закрепленного под блоками 15, размещенными на перекладине П-об- разной рамы 1, разгоняют инерционную массу 13 до установившейся заданной скорости в направлении извлечения тела. После этого сообщают движение с заданной скоростью телу 10. Показания силоизмери- тельного датчика 12 региструют во времени и одновременно регистрируют положение тела 10 в сыпучем материале с помощью самопишущего регистрирующего прибора 17, имеющего два канала, один из которых связан с датчиком 5 страгивания, а другой подключен к усилителю 18, связанному с силоизмерительным датчиком 12. 2 с.п. ф- лы, 3 ил. сл
12
К
л
Ачу
-/ фиг..
/y
9
UJU MMhiiiLUlLLiT
го
/
ФигЗ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Сумцов В | |||
| Ф | |||
| Электромагнитные же- лезоотделители | |||
| М.: Машиностроение, 1978, с | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
