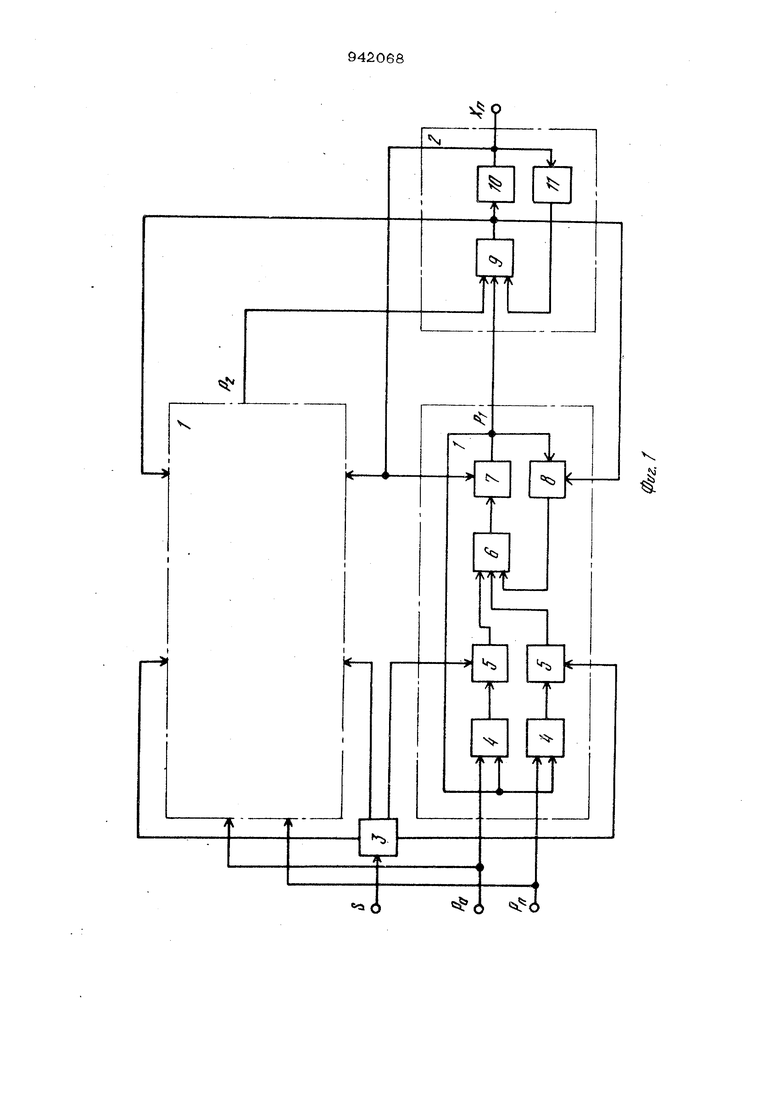
(54) УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ДВУСТОРОННЕГО ПНЕВМАТИЧЕСКОГО ДВИГАТЕЛЯ . Изобретение относится к моделированию с использованием аналоговой вычислительной техники и может найти применение в отраслях техники, где исследует ся работа всевозможных систем управления и контроля, в структуру которых входят пневматические исполнительные двигатели. Известно устройство для моделирования рабочего процесса в цилиндрах поршневых двигателей, моделирующее перемещение поршня и давление в циливдре, содержащее блок моделирования уравнения сил двигателя и модель цилиндра двигателя 1. Однако Данное устройство не имеет элементов, прямо отражающих такие важные конструктивные параметры пневм двигателя, как изменяющееся сечение питающего отверстия, переменный объем цилиндра, динамику газовых потэков, что делает эту модель не универсальной и затрудняет оптимизацию п.еречислеш1ых параметров. Наиболее близким техническим решением к предлагаемому является структурная схема пневмопривода, содержания функциональный блок и блок моделирования сил двигателя, состоящий из ннтегросумматора сил, интегратора и операционного усилителя |2, Недостатком известной схемы является то, что параметры модати расхода а здесь определяются экспериментально для каждого кошфетного двигателя, что также лшдает модель универсальности и снижает ее точность. Цель изобретения - создание универС льной модели, с высокой точностью отражающей работу двустороннего пневмодвигателя. Поставленная цель достигается тем, jTo устройство содержит два блока модел фования рабочих полостей каждый из которых состоит из двух сумматсров, трех блоков перемножения, интегросумматора .и блока деления, причем первые I входы обоих сумматоров являются вхо- дами задания атмосферного и питающего давления устройства, а выходы сумматоров подключены к первым входам соответственно первого и второго блоков перемножения, ко вторым входам блоков перемножения первого и второго блоков моделирования рабочих полостей подключены соответствующие выходы функци онального блока, вход которого является управляющим входом устройства, выходы первого и второго блоков перемножения блоков моделирования рабочих полостей соединены соответственно с первым и Вторым входами интегросумматора, третий вход которого подключен к выходу третьего блока перемножения, выход интегросумматора соединен со входом дели мого блока деления, делительный вход к торого подключен к выходу интегратора блока моделирования сил двигателя, а выход блока деления соединен со вторым входами обоих сумматоров блока модели рования рабочих полостей, первЬм входом третьего блока перемножения блока моделирования рабочих полостей, а такж с первым Входом интегросумматора блок моделирования сил двигателя, выход которого соединен со вторыми входами третьих блоков перемножения блоков моделирования рабочих полостей. На фиг. 1 приведена схема устройств на фиг. 2 - семейство из четырех зависимостей выходного сигнала функционального преобразователя от одного вход ного сигнала, подаваемого на электро- магнит струйника в реальном двиг ателе. Устройство содержит два блока MORG лирования рабочих полостей 1, блок 2 моделирования сил двигателя и функциональный преобразователь 3, реализующий зависимости выходных сигналов 4-щолевого золотника типа струйного реле. Каж дая модель рабочей полости содержит два сумматора 4, два блока 5 перемножения, интегросумматор 6, блок 7 деления и блок S перемножения, причем выходы обоих сумматоров 4 подключены к первым входам соответствующих блоков . 5 перемножения, ко вторым входам которых подключены .сооп ветственно два выхода функционального 11реобразовател,я 3,выходы блоков 5 перемножения соединены соответственно с первым и вторым входами инте1т:1осумматора 6, выход которого подключен ко входу делимого блока 7 деления, выход которого соединен со вторыми входами сумматора 4,входом блока 8 лсфемножения, выхол которого соединен с; -фотьим входом интегросумматора 6 и первым входом блока моделирования сил двигателя, Первые входы сумматоров 4 являются входами задания атмосферного PQ и избыточного питающего Р давления устройства. Блок моделирования сил двигателя состоит из соединенных последовательно в замкнутую систему интегросумматора 9 сил, интегратора 10 и операционного усилителя позиционной нагрузки И, причем на остальные два входа интегросумматора сил поданы сигналы с выходов моделей рабочих полостей 1. Выход интегросумматора сил соединен со вторыми входами блоков 8 перемножения, а сигнал с выхода интегратора 10 подается на делительные входы блоков деления. Каждая зависимость, реализуемая функциональным преобразователем, это типовая нелинейность типа ограничение со смещением. Уровни ограничений реализуют механические упоры, не дающие соплу струйника отклониться за максимально возможные углы. Характеристики положительной области выходных сигналов служат для зарядки, а отрицательной - для разрядки полостей. Сшющными линиями на фиг. 2 обозначены характеристики для одной полости, а пунктирными - для другой. Устройство работает следующим образом. Под действием управляющего сигнала функциональный преобразователь 3 изменяет коэффициент передачи блоков 5 перемножения пропорционально площади сечения изменяющегося отверстия зарядки (по каналу подачи избьггочного питающего давления Pj ) и разрядки (по каналу подачи атмосферного давления). Таким образом, фy кциoнaw ьный про- образователь 3, сумматоры 4 и блоки 5 перемножения обеих рабочих камер образуют модель четырехщелевого золотника типа струйного реле, сигнал с которого управляет давлением в полостях двустороннего пневмодвигателя. Сигналы с блоков перемножения - аналоги расходов наполнения и опорожнения рабочих полостейалгебраически сумм1фуются на кнтегросумматоре 6. Коэффициент передачи последовательно соединенных интегросумматора и блока деления изменяется обратно пропорционально изменению объема рабочих полостей по сигналу перемещения порщня Xfij поступающему на делитель ный вход блока 7 деления. На выходах блоков 1, т.е. блоков 7 деления, появляются сигналы P-f ii PI, соответствующие давлениям в полостях. Эти давления суммируются на интегросумматоре сил совместно с сигналом усилителя 11 позиционной нагрузки и вызывают появление на выходе блока 9 сигнала скорости движения поршня, а на выходе блока 1О - сигнала перемещения Xf,. Блоки 8 учитывают совместное влияние на расход воздуха изменения давления в соответствующей полости и скорости поршня.
В предлагаемом устройстве упрощается аппаратурная реализация моделей рабочих полостей и повышается точность отображения .процессов в пневмодвигателе.
формула изобретения
Устройство для- моделирования двустороннего пневматического двигателя, содержащее функциональный преобразователь и блок моделирования сил двигателя, состоящий из- интегросумматора сил, интегратора и операционного усилителя, гфичем выход интегросумматора подключен ко входу интегратора, а выход интегратора соединен со входом операционного усилителя. Выход которого подключен к одному из входов интегросумматора, остальные входы интегросумматора являются входами блока моделирования сил двигателя, отличающееся тем. Что, с целью повышения точности моделирования, оно содержит два блока моделирования рабочих, полостей, каждый из которых состоит из двух сумматоров, трех блоков перемножения, интегросумматора и блока деления, причем
первые Входы обоих сумматоров являются входами задания соответственно атмосферного и питающего давления устройства, а выходы сумматоров подключены к первым входам соответственно первого и второго блоков перемножения, ко вторым Входам блоков перемножения первого и Второго блоков моделирования рабочих Полостей подключены соответствующие Выходы функционального преобразователя, вход которого является управляющим, входом устройства, вьисоды -первого и Второго блоков перемножения блоков моделирования рабочих полостей соединены, соответственно с первым и вторым входами интегросумматора, третий вход которого подключен к выходу третьего блока перемножения, выход интегросумматора соединен со входом делимого блока деления, делительный вход которого подклк чен к Выходу интегратора блока моделирования сил двигателя, а выход блока деления соединен со вторыми входами обоих сумматороЁ блока моделирования рабочих полостей, первым входом третьего блока перемножения блока моделирования рабочих полостей, а также с первым входом интегросумматора блока моделирования сил двигателя, выход которого соединен со вторыми входами третьего блока перемножения блоков модепировани5 ° рабочих полостей.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 570073, кл. Q 06 G 7/64, 1977.
2.Мелкозеров П. С. Приводы в системах автоматического управления, М.,
Энергия, 1966. с. 394.


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования упруговязкой фрикционной пары | 1990 |
|
SU1780091A1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ГИДРАВЛИЧЕСКОЙ ПЕРЕДАЧИ | 1990 |
|
RU1736276C |
| Устройство для моделирования процесса механического выделения влаги из полимерных материалов в червячных машинах | 1986 |
|
SU1432568A1 |
| Модель пароводяного тракта энергоблока | 1990 |
|
SU1795481A1 |
| Устройство для полунатурного моделирования червячного привода станка | 1987 |
|
SU1522247A1 |
| Устройство для моделирования качки | 1986 |
|
SU1334168A1 |
| Устройство для моделирования вентилятора | 1988 |
|
SU1596355A1 |
| Устройство для моделирования привода конвейера | 1990 |
|
SU1762314A1 |
| Устройство для полунатурного моделирования робота | 1986 |
|
SU1444833A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 1991 |
|
RU2039371C1 |