ретения - расширение функциональных возможностей за счет изменения значений углов перекрытия включенных состояний секций обмотки якоря. Устройство содержит блок 4 моделирования динамики,ротора, узел 6 моделирования обмотки якоря, блок 0
1
Изобретение относится к аналоговой вычислительной технике и предназначено для использования при исследовании методами моделирования злектроприводов, особенно автоматизированных, с бесконтактными двигателями постоянного тока (БДПТ), у которых распределение индукции в зазоре вдоль окружности статора может быть аппроксимированно гармонической или параболической функциями .
Устройство воспроизводит зависимость частоты вращения со(t) ротора ВДПТ, описываемой следующей системо дифференциальных уравнений:
(с1);
+L §i ;
)(t)f(dL);
cl-(t) JtO(t)dt}
f() ,-0.5((-Ml) ;
tr
U(t)mju)(t)sign&dt; signu-U, (t)signcjO(t);
a(m
и
OnpHtUJ(l-.Jii)U
к
1-u при и Д -- ;)..
r
35
момент инерции вращающихся
частей двигателя и нагрузки; электромагнитный момент; момент сопротивления; -TOK, ЭДС, активное сопротив- о ление и индуктивность включенных секций обмотки якоря; постоянная двигателя; максимальное значение рабоче
го потока;
преобразования частоты вращения ротора, блок 21 моделирования угла поворота ротора, блок 27 моделирования угла поворота перекрытия включенных состояний секций обмотки якоря, узел ЗА моделирования пульсаций потока. 2 кп.
Q
f
0
5
0
5
о
ct - угол поворота ротора;
межкоммутационный интервал;
Ч/ - угол перекрытия включенных
состояний секций обмотки якоря;и р и - напряжение, соответствующее
01 O-tT),
углус, и максимальное значение этого напряжения; и. - постоянное напряжение, вырабатываемое на интервале угла Ф ;
и - максимальное рабочее напряжение вычислительной машины; m - масштаб сигнала угла поворота
ротора; t - время.
Цель изобретения - расширение функциональных возможностей путем изменения значений углов перекрытия включенных состояний секций обмотки якоря.
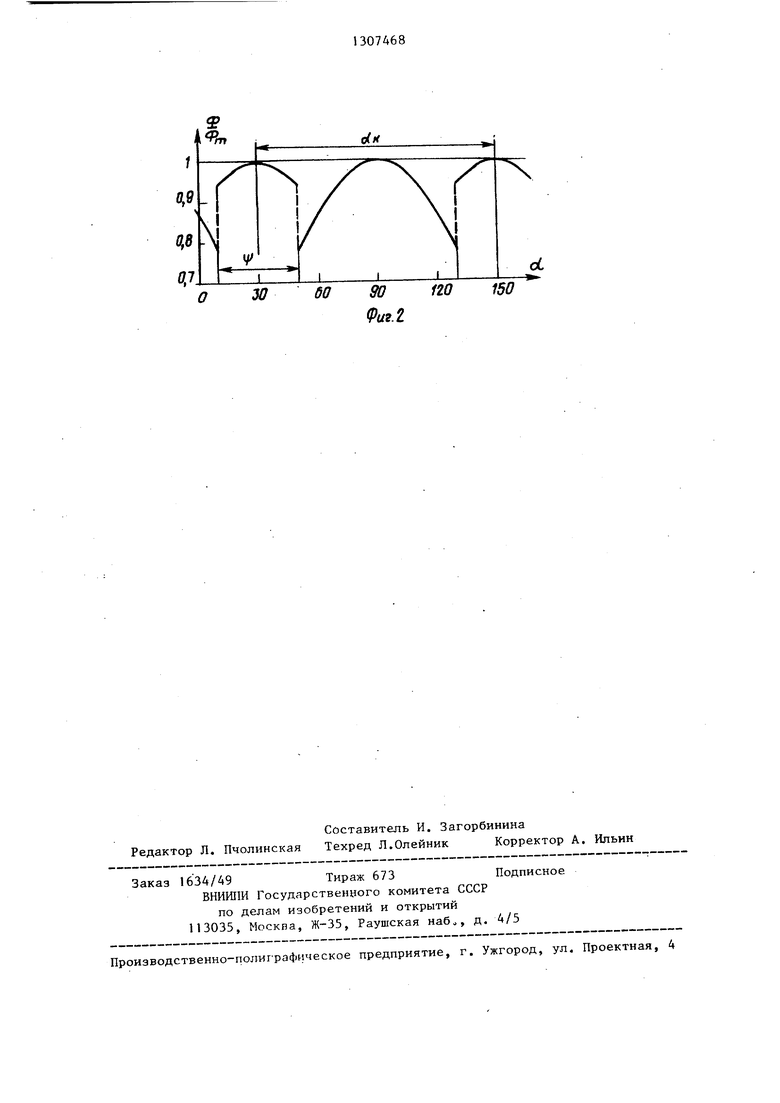
На фиг. 1 приведена схема предлагаемого устройства; на фиг. 2 - график . пульсации потока в зависимости от угла поворота ротора трехсекцион- ного БДПТ.
Устройство содержит информационный вход 1, вход 2 задания момента нагрузки, выход 3 значения частоты вращения ротора, блок 4 моделирования динамики ротора, выполненный на втором интегросумматоре 5, узел 6 моделирования обмотки якоря, состоящий из первого интегросумматора 7, первого 8 и второго 9 блоков умножения, блок 10 преобразования частоты вращения ротора, состоящий из второго инвертора 11, первого 12 и второго 13 коммутаторов, первого реле 14, первой группы контактов 15, второго реле 16, второй 17 и третьей 18 групп контактов, третьего 19 и четвертого 20 разнополярных с источников постоянного напряжения, блок 21 моделироваНИИ угла пов(зрота ротора, содержащий интегратор 22, первый инвертор 23, два выпрямительных диода 24 и 25 и седьмой источник 26 постоянного напряжения, блок 27 моделирования угла поворота перекрытия включенных состояний секций обмотки якоря, состоящий из второго сумматора 28, третье- го компаратора-29, третьего реле 30, четвертой группы контактов 31 к пятого 32 и шестого 33 источников постоянного напряжения, узел 34 мо- делирования пульсаций потока, состоящий из первого сумматора 35, третьего блока 36 умножения и первого источника 37 постоянного напряжения .
В процессе моделирования сигнал с информационного входа 1, пропорциональный напряжению питания двигателя, поступает на первый вход первого интегросумматора 7, на второй вход которого поступает сигнал с выхода первого блока 8 умножения, пропорциональный ЭДС двигателя, а сигнал с его выхода, пропорциональный току в обмотке якоря, подается на первый вход второго блока 9 умножения. С выхода последнего сигнал, пропорциональный электромагнитному моменту, поступает на первый вход второго интегросумматора 5, на второй вход которого подается сигнал с входа 2 задания нагрузки, в результате на его выходе и, следовательно, на выходе 3 получают сигнал, пропорциональный частоте вращения ротора. Этот сигнал подается на вторые входы первого 8 и второго 9 блоков умножения, а также на вход второго инвертора 1I, одну из входных клемм второй группы контактов 17 и первый вход первого компаратора 12. С выхода второго инвертора 1I сигнал поступает на другую входную клемму . второй группы контактов 17 и в зависимости от состояния второго реле
16сигнал частоты вращения ротора соответствующей полярности с выходной клеммы второй группы контактов
17поступает на вход интегратора 22, на вход по начальным условиям интегрирования которого поступает сигнал с выхода второго источника 26 постоянного напряжения. В результате
на выходе интегратора 22 вырабатывается сигнал, соответствуюп(ий углу поворота ротора, который непосредственно и через первый инвертор 23 подается на одноименные входные электроды выпрямительных диодов 24 и 25 и на входные клеммы первой группы .
контактов 15 первого реле 14, подключенного к выходу первого компаратора 12, работающего в режиме нуль-органа, для чего к его второму входу подсоединяют шину нулевого потенциала вычислительной машины. В зависимости от полярности сигнала на первом входе первого компаратора 12 с выходной клеммы первой группы контактов 15 сигнаш, соответствующий углу поворота
5-ротора, поступает на первый вход второго компаратора 13, на второй вход которого подают сигнал с выходной клеммы третьей группы контактов 18, на входные клеммы которых поступают .
0 сигналы с выходов источников 19 и 20, постоянного напряжения, а сигнал управления вторым реле 16 подается с выхода этого компаратора,
с С одноименных выходных электродов диодов 24 и 25 сигнал, соответствующий модулю угла поворота ротора, поступает на первые входы второго сумматора 28 и третьего компаратора 29,
л на второй вход которого подается сигнал с выхода пятого источника посто явного напряжения 32, а сигнал управления с выхода этого компаратора поступает на реле 30, которое своей четвертой группой контактов 31 подает на второй вход второго сумматора 28 сигнал с выхода шестого источника 33 постоянного напряжения. В результате на выходе сумматора 28 появляет« ся сигнал, учитывающий величину угла перекрытия включенных состояний секций обмотки якоря, который подается иа входь третьего блока 36 умножения. С выхода последнего сигнал поступает на второй вход первого сумматора 35, на первый вход которого подают сигнал с выхода первого источника 37 постоянного напряжения, в результате с выхода этого сумматора сигнал, пропорциональньй пульсирующему пото5
5
0
5
ку, поступает на первьш вход первого блока 8 умножения.
Формула изобретения
Устройство для моделирования бесконтактного двигателя постоянного тока, содержащее узел моделирования обмотки якоря, состоящий из первого
5 1
интегросумматора, первого и второго блоков умножения, блок моделирования динамики ротора, выполненный на втором интегросумматоре, блок моделирования угла поворота ротора, содержащий интегратор, первый инвертор и два вьтрямительных диода, узел моделирования пульсаций потока, состоящи из первого сумматора, третьего блока умножения и первого источника постоянного напряжения, в блоке моделирования угла поворота ротора выход интегратора непосредственно и через первый инвертор соединен с одноименными электродами выпрямительных диодов, а выходной электрод одного диода подключен к одноименному выходном электроду другого диода, в узле моделирования пульсаций потока выход первого источника постоянного напряжения соединен с первым входом первого сумматора, выход которого подключен к первому входу первого блока умножения, выход которого соединен с первым входом первого интегросумматора, второй вход которого является информационным входом устройства а выход подключен к первому входу второго блока умножения, выход которого соединен с первым входом второго интегросумматора, второй вход которого является входом задания момента нагрузкой устройства, а выход является выходом значения частоты вращения ротора устройства и соединен с вторыми входами первого и второго блоков умножения, отличающееся тем, что, с целью расширения функциональных возможнос- тей за счет изменения значений углов перекрытия включенных состояний секций обмотки якоря, в него введены блок преобразования частоты вращения ротора, состоящий из второго инвертора, первого и второго компараторов, первого реле с первой группой контактов, второго реле с второй и третьей группами контактов, третьего и четвертого разнополярных источников Постоянного напряжения, и блок
0
5
моделирования угла перекрытия включенных состояний секций обмотки якоря, состоящий из второго сумматора, третьего компаратора, третьего реле с четвертой 1 руппой контактов, пятого и шестого источников постоянного напряжения, в блок моделирования угла поворота ротора дополнительно введен седьмой источник постоянного напряжения, выход которого подключен к входу интегратора по начальным условиям интегрирования, в узле моделирования пульсаций потока входы блока умножения соединены между со5 бой, а выход подключен к второму входу второго сумматора, выход второго интегрос;умматора непосредственно и через второй инвертор соединен с входными клеммами второй группы контактов, .а также с первым входом первого компаратора, второй вход которого подключен к шине нулевого потенциала, а выход - к первому реле, выходная клемма второй группы контактов соединена с входом интегратора, выход которого и выход первого инвертора подключены к входным клеммам первой группы контактов, выходная клемма которой соединена с первым входом второго компаратора, второй вход которого подключен к выходной клемме третьей группы контактов, входные клеммы которой соединены с выходами третьего и четвертого разно5 полярных источников постоянного напряжения, выход второго компаратора подключен к второму реле, одноименные выходные электроды выпрямительных диодов соединены с первыми входами
0 второго сумматора и третьего компаратора, второй вход последнего подключен к выходу пятого источника постоянного напряжения, а выход этого компаратора соединен с третьим реле,
5 вьгход шестого источника постоянного напряжения через четвертую группу контактов подключен к второму входу второго сумматора,выход которого соединен с входами третьего блока умно0 жения.
0
ол
60
90 120 Фиг.г
150
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования @ -фазного вентильного электродвигателя | 1990 |
|
SU1797133A1 |
| Устройство для моделирования вентильного электродвигателя | 1988 |
|
SU1596357A1 |
| Устройство для моделирования электромагнитных процессов в индукторных машинах | 1977 |
|
SU729599A1 |
| Устройство для моделирования силы трения | 1986 |
|
SU1399779A1 |
| Устройство для моделирования привода конвейера | 1990 |
|
SU1762314A1 |
| Устройство для моделирования электромагнитных процессов в асинхронных машинах | 1989 |
|
SU1681315A1 |
| Устройство для воспроизведения зависимости силы трения от нормальной силы,скорости,времени и предварительного смещения | 1985 |
|
SU1312619A1 |
| Устройство для моделирования пары трения | 1988 |
|
SU1628062A1 |
| Устройство для моделирования диаграммы циклического деформирования | 1989 |
|
SU1803922A1 |
| Устройство для моделирования механических характеристик твердого тела | 1988 |
|
SU1755302A1 |
Изобретение относится к аналоговой вычислительной технике и предназначено для использования при моделировании на аналоговых вычислительных машинах электроприводов с бесконтактными двигателями постоянного тока, для которых распределение индукции в зазоре вдоль окружности статора может быть аппроксимировано гармонической функцией. Цель изоб- J (Л Од о 4; а 00
| Устройство для моделирования двигателя постоянного тока | 1977 |
|
SU661570A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Владимиров Я.Г Моделирование на АВМ электропривода с БДПТ | |||
| -,Сб | |||
| ст.: Электронная техника в автоматике, вып | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| М., Радио и связь, 1984, с | |||
| Способ исправления пайкой сломанных алюминиевых предметов | 1921 |
|
SU223A1 |
