Изобретение относится к пищевой прб- мышленности, в частности к шнековым со- лодоворошителям для ворошения и выгрузки солода из солодорастильного ящика.
Известны различные устройства для ворошения и выгрузки солода, например устройство, содержащее шнековый ворошитель, связанный с приводом для воз- вратно-поступательного перемещения вдоль ящика, и приспособление для транспортирования солода. Приспособление для транспортирования солода состоит из рамы и по меньшей мере двух пластин, имеющих форму ромба и ориентированных в раме с возможностью поворота вокруг вертикальной оси с образованием сплошного зигзагообразного щита.
Недостатками данного устройства являются его конструктивная сложность, необходимость дополнительного привода или же специальной передачи для поворота ромбовидных пластин.
Прототипом настоящего изобретения является шнековый солодоворошитель для ворошения и выгрузки солода из солодорастильного ящика, который содержит вертикальные шнеки, привод с системой реверсивного перемещения каретки вдоль ящика. Каждый шнек в нижней части имеет двухзаходную навивку и снабжен плоскими скребками в виде держателя с эластичным элементом.
Эластичные элементы выполнены и установлены так, что при расположении скребков в одну линию гибкие элементы соVJOs СА 4 VI VI
седмих Шнеков перекрывают один другой по длине.
Солбдово р ошитбль имеет блокировочное устройство, состоящее и- бесчонтзктио- го датчика и фиксирующего флажка.
Режим ворошения происходи известным способом при помощи вращающихся шйеков.
Режим выгрузки осуществляется следующим образом. После захода ворошит епя в слой определенной длины кэреткт останавливается, а шнеки продолжают вращаться до тех пор, пока фиксирующий флажок не войдет в паз бесконтактного датчика, после чего вращение шнеков прекращайся и все скребки выстраиваются в одну линию, образуя общий скребок.
После команды Реверс ворошитель при остановленных шнеках двигается к месту выгрузки, сдвигая нижний слой солода, увлекаемый скребками.
Основным недостатком данного устройства является его низкая производительность б режиме выгрузки, т.е. гарантировано сдвигается только нижний слой солода.
Целью настоящего изобретения является повышение производительности.
Устройство содержит вертикально смонтированные на каретке шнеки, в нижней части которых установлены плоские скребки, механизм подвода шнеков, механизм блокировки и систему реверсивного перемещения каретки вдоль ящика.
Согласно изобретению каждый шнек снабжен лопатками, установленными по высоте шнека с диаметрально противоположных сторон между его витками, каждая мз лопаток состоит из двух пластин, один край которых отогнут в сторону раскрытия соот- ветствукадей части лопатки, а противоположные края шарнирно установлены на неподвижно закрепленном на валу шнека держателе, расположенном перпендикулярно оси вала и параллельно скребкам, при этом на держателе установлен фиксатор раскрытия пластин лопагки, служащий также для рассекания потока.
Заявляемое техническое решение позволяет в режиме выгрузки перемещать Значительно больший объем солода, чем при известном техническом решении, что отвечает поставленной цели изобретения - повышение производительности
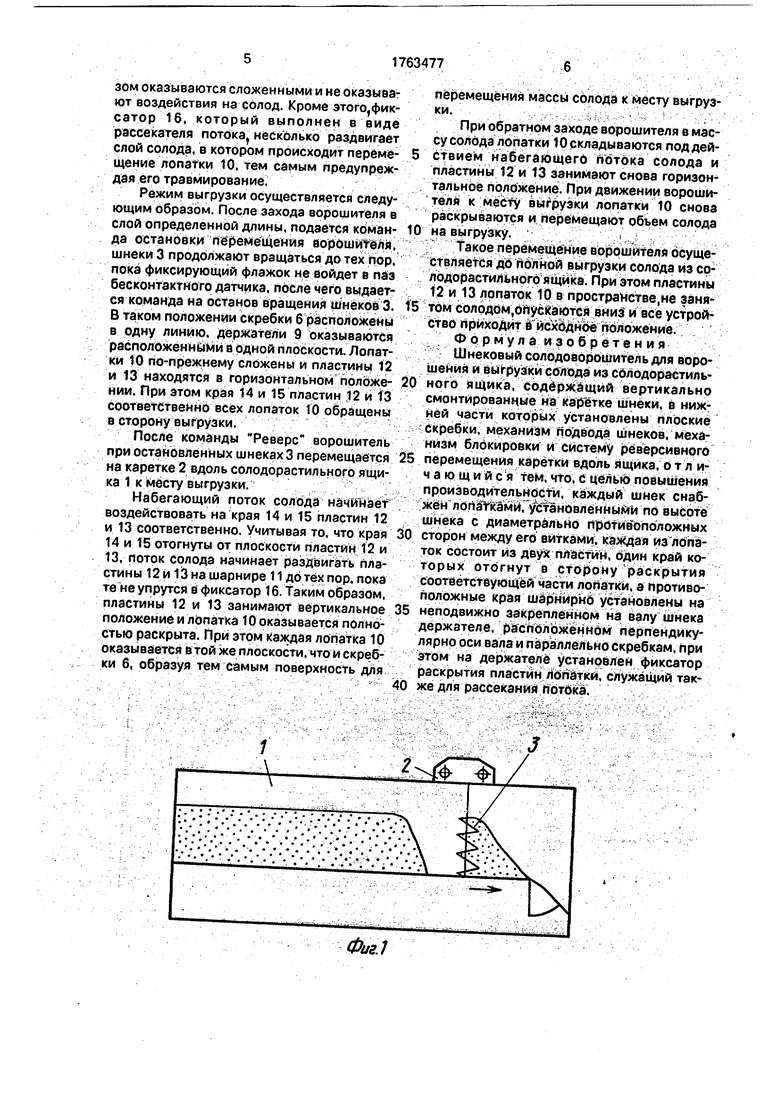
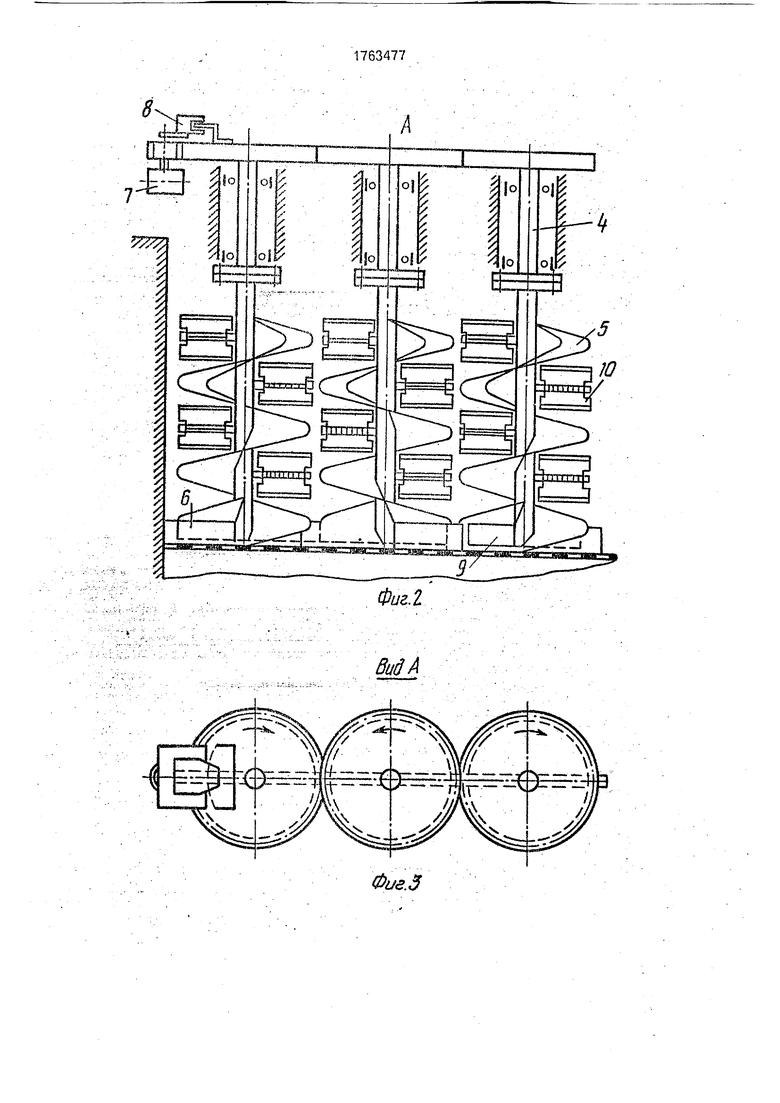
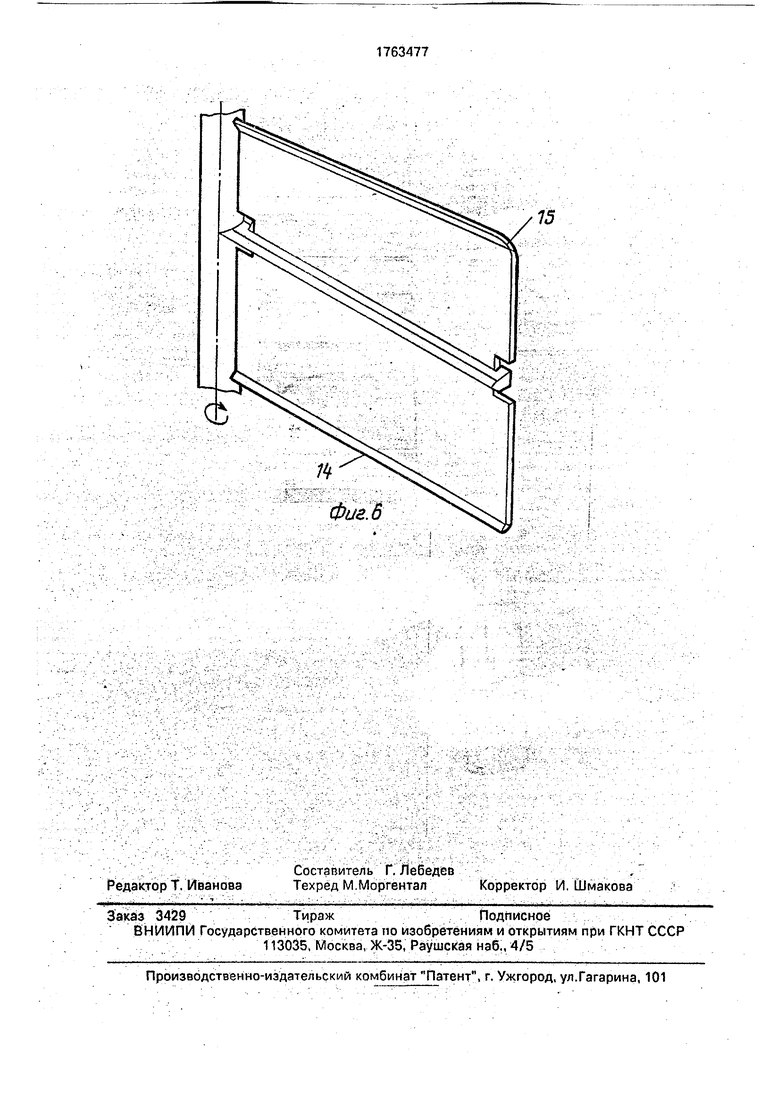
На фиг.1 изображен солодорастильный ящик со шнековым солодоворошителсм; на фиг.2 - общий .вид солодоворошителя для ворошений и выгрузки солода из солодора- стильного ящика; на фиг.З - вид по стрелке А на фиг.2; на фиг.4 - участок шнека солодо ворошителя с лопатками; на фиг.5 - вид по стрелке Б на фмг.4; на фиг.6 - лопатка в изометрии.
IJIчековый солодоаорошитель для ворошочия и выгрузки солода из солодорастиль- ного ящика состоит из ящика 1, в котором расположены вертикально смонтированные на каретке 2 шнеки 3. Каждый шнек 3 состоит из вала 4, на котором имеются витки 5.
0 Вращение шнеков 3 от привода осуществляется при помощи шестерен. В нижней части шнека 3 расположены плоские скребки 6. Каретка 2 перемещается вдоль ящика 1 при помощи привода 7, который имеет систему
5 реверсивного перемещения каретки 2, на которой установлен блокировочный механизм 8, состоящий из бесконтактного датчика, расположенного на каретке 2, и фиксирующего флажка, установленного на
0 одной из шестерен привода шнеков 3,
Между витками 5 шнека 3 перпендикулярно валу 2 установлены держатели 9, которые расположены в той же плоскости, что и скребки 6. На держателях 9 установлены
5 лопатки 10. Держатели 9 установлены перпендикулярно оси 2 вала шнека 3 по обе CTOjO in его. Держатели 9 также параллельны скрьи ам 6.
Каждая лопатка 10 состоит из двух пла0 стин 12 и 13 соответственно, которые при помощи шарнира 11 закреплены на держа- тепе 9, Каждая пластина 12 и 13 имеют отогнутые края 14 и 15 соответственно.
Сторона держателя 9, обращенная в
5 сторбиу вращения шнека З.снаОжена фиксатором 16 раскрытия пластин 12 и 13, который выполнен в виде рассекателя потока.
Шнековый солодоворошительдля ворошения и выгрузки солода из солодорастиль0 пого ящика работает следующим образом.
В исходном положении солодоворошитель находится в пустом солодорастильном
ящике 1. Пластины 12 и 13 свободно висят
на держателе 9. Края 14 и 15 пластин 12 и 13
5 лопатки 10 обращены под действием силы тяжести вниз ко дну солодорастильного ящика.
После наполнения солодом солодорастильного ящика 1 осуществляется процесс
0 ворошения. Для этого включается привод 7, который вращает шнеки 3 и одновременно перемещает каретку 2 вдоль солодорастильного ящика 1. Вращение шнеков 3 происходит в массе солода, поэтому набегающий
5 поток оказывает давление на пластины 12 и 13 лопаток 10. Под этим действием пластины 12 и 13 занимают горизонтальное положение и перемещаются в массе солода вместе со шнеками 3, оставаясь в горизонтальном положении, Лопатки 10таким образом оказываются сложенными и не оказывают воздействия на солод. Кроме этого,фик- сатор 16, который выполнен в виде рассекателя потока, несколько раздвигает слой солода, в котором происходит перемещение лопатки 10. тем самым предупреждая его травмирование.
Режим выгрузки осуществляется следующим образом. После захода ворошителя в слой определенной длины, подается команда остановки перемещения ворошителя, шнеки 3 продолжают вращаться до тех пор. пока фиксирующий флажок не войдет в паз бесконтактного датчика, после чего выдается команда на останов вращения шнеков 3. В таком положении скребки 6 расположены в одну линию, держатели 9 оказываются расположенными в одной плоскости. Лопатки 10 по-прежнему сложены и пластины 12 и 13 находятся в горизонтальном положении. При этом края 14 и 15 пластин 12 и 13 соответственно всех лопаток 10 обращены в сторону выгрузки.
После команды Реверс ворошитель при остановленных шнеках 3 перемещается на каретке 2 вдоль солодорастильного ящика 1 к месту выгрузки.
Набегающий поток солода начинает воздействовать на края 14 и 15 пластин 12 и 13 соответственно. Учитывая то, что края 14 и 15 отогнуты от плоскости пластин 12 и 13, поток солода начинает раздвигать пластины 12 и 13 на шарнире 11 до тех пор, пока те не упрутся в фиксатор 16. Таким образом, пластины 12 и 13 занимают вертикальное положение и лопатка 10 оказывается полностью раскрыта. При этом каждая лопатка 10 оказывается в той же плоскости, что и скребки 6, образуя тем самым поверхность для
перемещения массы солода к месту выгрузки.
При обратном заходе ворошителя в массу солода лопатки 10 складываются поддей- ствием набегающего потока солода и пластины 12 и 13 занимают снова горизонтальное положение. При движении ворошителя к месту выгрузки лопатки 10 снова раскрываются и перемещают объем солода 0 на выгрузку.
Такое перемещение ворошителя осуществляется дО полной выгрузки солода из солодорастильного ящика. При этом пластины 12 и 13 лопаток 10 в пространстве,не заня- 5 том солодом,опус аются вниз и все устройство приходит и исходное положение. Формула изобретения Шнековый солодоворошитель для ворошения и выгрузки солода из солодорастиль- 0 ного ящика, содержащий вертикально смонтированные яа каретке шнеки, в нижней части которых установлены плоские скребки, механизм подвода шнеков, механизм блокировки и систему реверсивного 5 перемещения каретки вдоль ящика, отличающийся тем, что, с целью повышения производительности, каждый шнек снабжен лопаГкЗмйГустаноеленными по высоте шнека с диаметрально противоположных 0 сторон между его витками, каждая из лопаток состоит из двух пластин, один край которых отогнут б сторону раскрытия соответствующей части лопатки, а противоположные края шэрнирно установлены на 5 неподвижно закрепленном на валу шнека держателе, расположенном перпендикулярно оси вала и параллельно скребкам, при этом на держателе установлен фиксатор раскрытия пластин лопатки, служащий так- 0 же для рассекания потока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Шнековый солодоворошитель для ворошения и выгрузки солода из солодорастительного ящика | 1986 |
|
SU1439119A1 |
| Шнековый ворошитель для ворошения и выгрузки солода из солодорастительного ящика | 1988 |
|
SU1664832A1 |
| Шнековый солодоворошитель | 1988 |
|
SU1640150A1 |
| Устройство для выгрузки солода из солодорастильного ящика | 1982 |
|
SU1097666A1 |
| СИСТЕМА ПОЛНОГО ОПОРОЖНЕНИЯ | 2020 |
|
RU2792630C2 |
| Устройство для выгрузки солода из солодорастительного ящика | 1977 |
|
SU729243A1 |
| Способ автоматического управления процессом солодоращения | 1989 |
|
SU1684327A1 |
| Способ автоматического управления температурой солода в солодорастильном ящике | 1988 |
|
SU1555350A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ ВЫГРУЗКИ СОЛОДА ШНЕКОВЫМ ВОРОШИТЕЛЕМ ИЗ СОЛОДОРАСТИЛЬНОГО ЯЩИКА | 1992 |
|
RU2021340C1 |
| Солодоворошитель | 1982 |
|
SU1063827A1 |

Использование: ворошение и выгрузка солода из солодорастильного ящика при производстве солода. Сущность изобретения: шнековый солодоворошитель содержит каретку, смонтированные на ней вертикально шнеки, в нижней части которых установлены плоские скребки, механизм подвода шнеков, механизм блокировки и систему реверсивного перемещения каретки вдоль солодорастильного ящика. Каждый шнек снабжен лопатками, установленными по высоте шнека с диаметрально противоположных сторон между его витками. Каждая из лопаток состоит из двух пластин, один край которых отогнут в сторону раскрытия соответствующей части лопатки, а противоположные края шарнирно установлены на держателе, неподвижно закрепленном на валу шнека. Держатель расположен перпендикулярно оси вала и параллельно скребкам. На держателе установлен фиксатор раскрытия пластин лопатки, служащий также для раскрытия потока. 6 ил.
Фиг.1
1 2Пф
UfrE9U
fl
Фиг. 4
„
Ш
N
I
- г -
/ /
t
X
Фаг J
сь
| Шнековый солодоворошитель для ворошения и выгрузки солода из солодорастительного ящика | 1986 |
|
SU1439119A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
