1
(21)4868703/08 (22)10.07.90 (46)30.09.92, Бюл. №36
(71)Всесоюзный научно-исследовательский институт по машинам для промышленности строительных материалов
(72)Б. А, Лабковский и Ю. К, Саркисов
(56)Авторское свидетельство СССР Me 1454687, кл. В 25 J 11/00, 1986.
(54) МАНИПУЛЯТОР
(57)Использование: для производства строительных материалов, в частности при автоматической разгрузке керамических дренажных труб и кирпича. Звенья шарнирной руки 3 соединены двумя шарнирными тягами 6 и 7, а между собой - осью 8, и образуют шарнирно-рычажный механизм пантографа. На консоли 4 установлена каретка 9 с вертикальным поворотным валом 10, на котором закреплены подъемник 11 с вильчатым захватом 12. Шток гидроцилиндра 18 соединен с вильчатым захватом 12. С ведущим звеном шарнирно-рычажного механизма (кривошипом) связан диск преобразователя угол-код, а со смежным ему звеном - рукоятка управления. Движения рабочего органа осуществляются при воздействии оператора на рукоятку управления. 3 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1454687A1 |
| Гидропривод рабочего оборудования фронтального погрузчика | 1989 |
|
SU1745843A1 |
| СПОСОБ ИНТУИТИВНО КОПИРУЮЩЕГО УПРАВЛЕНИЯ ОДНОКОВШОВЫМ ЭКСКАВАТОРОМ | 2016 |
|
RU2614866C1 |
| Манипулятор для очистки железнодорожных полувагонов | 1985 |
|
SU1335492A1 |
| Манипулятор с ручным управлением | 1985 |
|
SU1315288A1 |
| МАНИПУЛЯТОР МАШИНЫ ДЛЯ ОБРАБОТКИ ДЕРЕВЬЕВ | 2003 |
|
RU2251479C2 |
| Источник сейсмических сигналов ударного типа | 1988 |
|
SU1557538A1 |
| Автоматизированная установка для ультразвукового контроля изделий | 1989 |
|
SU1767410A1 |
| МАНИПУЛЯТОР ДЛЯ ОЧИСТКИ ВАГОНОВ | 1987 |
|
RU2028226C1 |
| КРАН-ПОГРУЗЧИК (ВАРИАНТЫ) | 2006 |
|
RU2317248C2 |
Предлагаемое изобретение относится к оборудованию для производства строительных материалов и может быть использовано, в частности, при автоматической разгрузке керамических дренажных труб и кирпича.
Известное аналогичное устройство - манипулятор с системой дистанционно-автоматического управления, содержит датчики обратных связей и специализированный вычислитель, что усложнят и удорожает манипулятор, и делает его менее надежным.
Известное другое устройство для определения положения управляющей рукоятки- манипулятора, содержащее также большое число датчиков, усложняющих систему.
Наиболее близким к предлагаемому устройству является манипулятор, содержащий основание, механическую руку, выполненную в виде шарнирно-рычажного механизма пантографа и шарнирно связанСП
С
ную с основанием, гидроприводы перемещения механической руки, связанные с гидросистемой управления.
Недостатком манипулятора этого типа является то, что управление приводами выполнено раздельным, оператор управляет приводами отдельных звеньев последовательно. Число кнопок управления достигает 8, если даже допустить движение на одной скорости, что требует от оператора высокой профессиональной подготовки. При этом снижается производитепьность труда, увеличивается утомляемость оператора.
Целью изобретения является увеличение производительности.
Цель достигается тем, что манипулятор, содержащий основание, механическую руку, выполненную в виде шарнирно-рычажного механизма пантографа и шарнирно-связанную с основанием, гидроприводы перемещения механической руки,
VJ
О
fc
00 Сл)
связанные с гидросистемой управления, дополнительно снабжен рукояткой управления с кнопкой и преобразователем угол - код, имеющим диск и электрические каналы передачи сигналов в гидросистему управления, при этом диск преобразователя соединен с ведущим звеном шарнирно-рычаж- ного механизма, а рукоятка управления - с другим, смежным ему звеном.
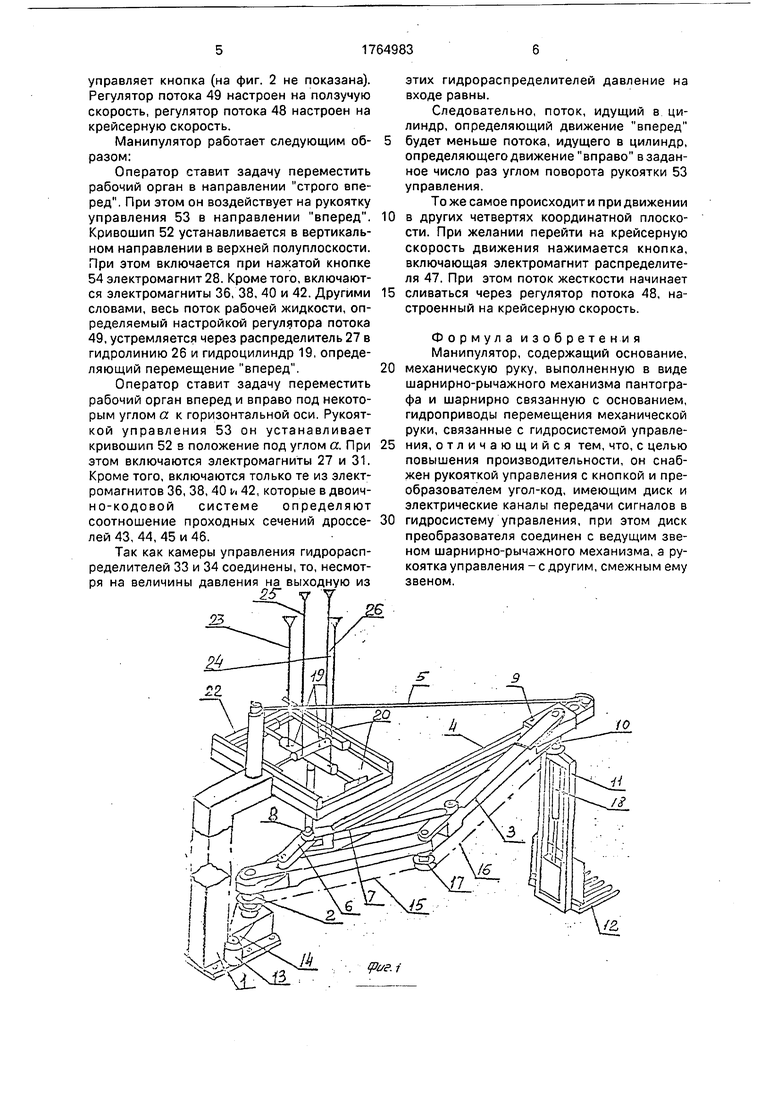
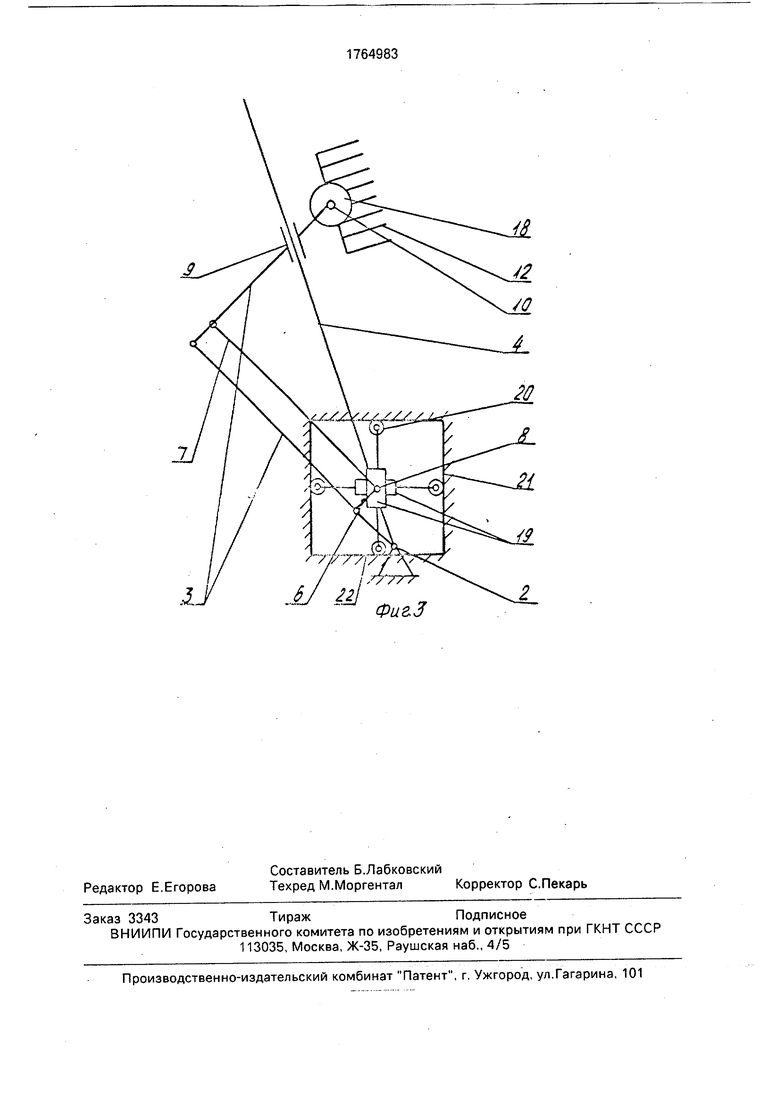
На фиг. 1 показана кинематическая схема манипулятора (в изометрии); на фиг. 2 - схема управления манипулятора; на фиг. 3 - кинематическая схема манипулятора.
Манипулятор состоит из станины 1, на вертикальной оси 2 которой с возможностью поворота установлена двухзвенная шарнирная рука 3 и поворотная консоль 4, поддерживаемая растяжкой 5. Поворотная консоль и растяжка, воспринимая на себя вес подвижных частей и перемещаемого груза, повышают жесткость манипулятора.
Звенья двухзвенной шарнирной руки 3 соединены двумя шарнирными тягами 6 и 7, причем точки соединения выбраны так, что образуется шарнирный механизм пантографа.
Шарнирные тяги соединены между собой осью 8.
На поворотной консоли 4 установлена каретка 9 с вертикальным поворотным валом 10, на котором закреплен подъемник 11 с вильчатым захватом 12. Вертикальный поворотный вал 10 имеет привод, выполненный в виде гидродвигателя 13 и трех цепных передач 14, 15 и 16, звездочки которых установлены на гидродвигателе, осях шарнирной руки 2, 17 и поворотному валу 10. Подъемник оборудован гидроцилиндром 18, шток которого соединен с кареткой вильчатого захвата 12,
На станине 1 установлен привод, состо- ящий из двух взаимно перпендикулярных гидроцилиндров 19 с двусторонними выходами штоков, концы которых закреплены на каретках 20. Каретки 20 установлены в двух параллельных направляющих 21 и двух параллельных направляющих 22. Направляющие 21 и 22 взаимно перпендикулярны. Гильзы гидроцилиндров 19 жестко соединены между собой и с осью 8 шарнирных тяг 6 и 7.
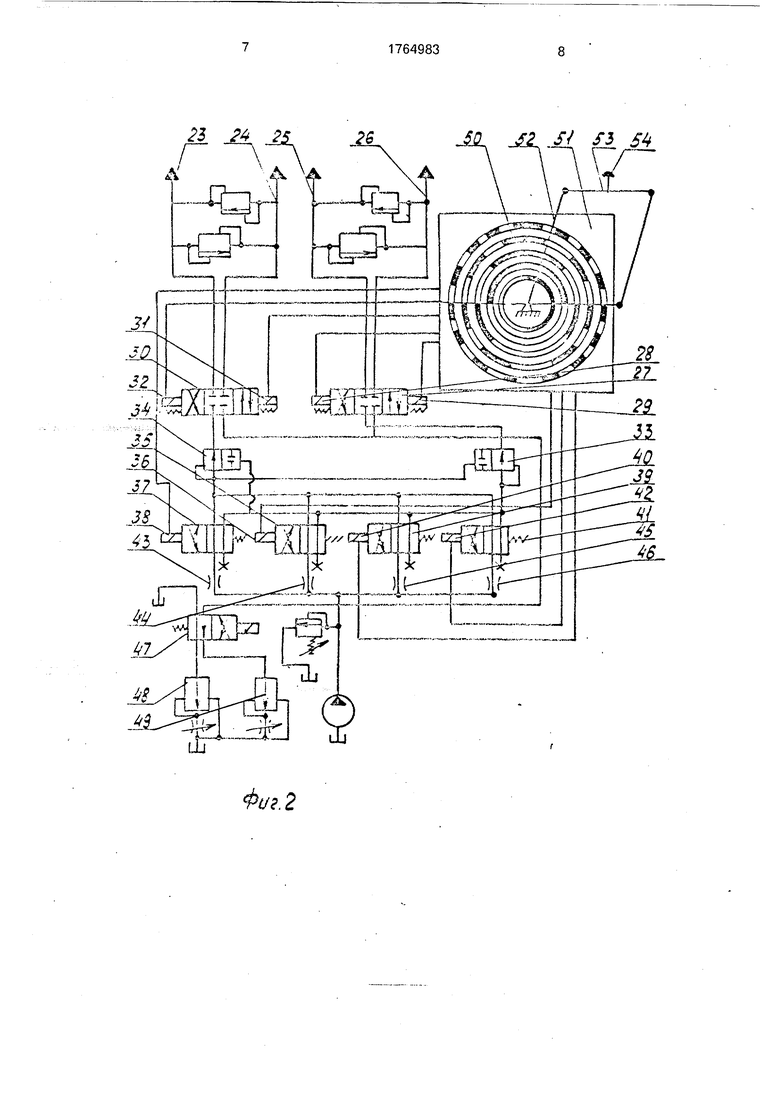
Подводы одного из гидроцилиндров 19 соединены с гидролиниями 23 и 24, а подводы второго гидроцилиндра 19 с гидролиниями 25 и 26. Гидролинии 25 и 26 соединены с отводами 3/4 гидрораспределителя 27 (фиг. 2) с электромагнитами 28 и 29. Гидролинии 23 и 24 соединены с отводами 3/4 гидрораспределителя 30 с электромагнитами 31 и 32. Напорный подвод гидрораспределителя 27 соединен с отводом гидрораспределителя 33, а напорный подвод гидрораспределителя 40 соединен с отводом гидрораспределителя 34. Камера управления гидрораспределителя 33 соединена с камерой управления гидрораспределителя 34 и с первыми отводами 2/3 гидрораспределителя 35 с электромагнитом 36, 37, с электромагнитом 38, 39, с электромагнитом
0 40,41, с электромагнитом 42. Вторая камера управления гидрораспределителя 34 соединена со второй камерой управления гидрораспределителя 33 и со вторыми отводами гидрораспределителей 35, 47, 38 и 41. Под5 воды гидрораспределителей 35, 37, 39 и 40 соответственно через дроссели 43, 44, 45 и 46 с двоично взвешенными проходными щелями соединены с напорной линией гидросистемы.
0 Сливные отводы гидрораспределителей
27и 30 через 2/4 гидрораспределитель 47 и регуляторы потока 48 и 49 соединены с баком, Диск 50 преобразователя 51 угол-код соединен с кривошипом 52 (т.е. с ведущим
5 звеном) шарнирно-рычажного механизма, на шатуне которого закреплена рукоятка 53 управления с кнопкой 54,
Дорожки преобразователя 51 выполнены двоично-взвешенными по угловому пути
0 и симметричными относительно вертикальной оси. Выход каждого из датчиков, стоящего против каждой из дорожек преобразователя порознь через усилитель соединен с электромагнитами 36, 38, 40, 52.
5 Таким образом, код включения этих электромагнитов повторяет код включения датчиков преобразователя угол-код и является аналогом угла поворота кривошипа 52. Две внутренние дорожки преобразователя 51
0 выполнены так, что одна из дорожек зачернена на дуге 270...90°, а на второй зачернена дуга 0...1800. Выход первого из этих датчиков через элемент И и усилитель соединен с электромагнитом 28, и через эле5 мент И и установленные последовательно с ним инвертор и усилитель - с электромагнитом 29. Выход второго датчика через элемент И и усилитель - с электромагнитом 31 и через элемент И, и установленные после0 довательно с ним инвертор и усилитель - с электромагнитом 32, Элементы И установлены в цепи кнопки 54. Таким образом при свободный кнопке 54 ни один из электромагнитов 28, 29, 31 и 32 не включен. Если
5 кнопка нажата, то в зависимости от того, находится рукоятка в верхней или нижней полуплоскости, включается электромагнит
28и 29, а в первой или левой полуплоскости включается электромагнит 31 или 32 вклю- чением электромагнита распределителя 47
Лъ
f
|
Ьч 1, k, Ям k с, uj r J00 Iх1 J J IJ4 J J J 4
АТУУ/ЙТТ
-Ј.
1
Фиг.3
