Изобретение относится к мешиио- ст{)оению, а ньтенно к оборудовашда дл|1 производства строительных матери ал|эв, и может быть использовано пр производстве керамических дре на|кных труб и кирпича.
; Цель изобретения - расширение зоны обслуживания манипулятора.
На чертеже изображен манипулятор, o6|mm вид.
Манипулятор состоит из основания (станины ) I, на вертикальной оси 2 которой с возможностью независимого позорота дпуг от друга установлены мекапическая двухзвенная шарнирная рукга 3 и поворотная консольная направляющая 4, поддерживаемая растяжкой 5. Звенья механической двухзвенпой шарнирной руки соединены двумя шарнирными тягами 6 и 7, причем точки соединения выбраны так, что образуется известньм в технике шарнирно- рычажный механизм пантографа. Шарнирные тяги б и 7 соединены между собой с возможностью независимого друг относительно друга поворота осью 8.
, I На поворотной консольной направ- ля{ю1ч,ей 4 установлена основная каретка 9 с вертикальным поворотным ва- лсм 10, на котором закреплен захват ньй орган, имеющий подъемник 11 с в льчатым захватом 12. Вертикальный пс}воротный вал 10 шарнирно с возмож- нс|стью свободного вращения соединен с концом механической руки 3 и име- eif привод поворота, выполненный в вЦде силового цилиндра, например гр| дродвигателя 13, и трех цепньпс пе рс|дач 14, 15 и 16. Звездочки на ва- п гидродвигателя 13 и валу 10 зак- р(плены жестко, а на осях 2 и 17 мс ханической руки звездочки закрепл с возможностью свободного враще- и выполнены в виде блока из дву соединенных мелсду собой звезд()чек.
Подъемник оборудован приводом ос вфго перемещения захватного органа, н.апример, гидроцилнндром 18, шток к Tit)poro соединен с кареткой вильчатого захвата 12.
На основании 1 установлен приво перемещения механической руки, состоящий из двух взаимно перпендикулярных силовых цилиндров, например гндроцилиндров 19, с двухсторонними выходами штоков, концы которых зак
0
5
0
5
0
5
0
5
реплены на дополнительных каретках 20. Дополнительные каретки 20 установлены в двух параллельных направ- 21 и двух параллельных tianpae- ляющих 22. Направляющие 21 и 22 имно перпендикулярны и образ тот рамку корпуса гидроцилиндров 19,. жестко соединены между собой и осью 8 i шарнирных тяг 6 и 7.
Манипулятор имеет гидростанцию и пульт управления (не показано ).-На пульте имеются кнопки для перемещения вильчатого захвата по л)обой из трех взаимно-перпендикулярных координатных осей и кнопки для поворота вильчатого захвата вокруг вертикальной оси.
Манипулятор работает cлeдyющи s образом.
При нажатии одной или нескольких кнопок на пульте управлег ия приводятся в движение соответствз ющие гидроцилиндры или гидродвигатель. Можно использовать яю.ые сочетания кнопок.
Перемещение штока гидроцилиндра 18 вызывает, подъем или опускание, вильчатого захвата 12. Вращение выходного вала гидродзигателя 13 через цепные передачи 14,15 и б передается на вал 10 и вильчатый захват 12. Поворо.т вала 10 зависит только от поворота вала гидродвигателя 13 и не зависит от поворота шарнирной рз ки йокруг оси 2. Такая кинематическая связь между гидродвигателем 13 и валом 10 обеспечивается вследствие того, что диаметры зведочек цепных передач 15 и 16 выбраны одинаковых размеров, а звездочки на осях 2 и 17 закреплены с возможностью свободного вращения.
При нажатии кнопки одного из гид- роцилинлров 19 происходит прямолинейное перемещение гильз гидроцилиндров вдоль одного из штоков этих гидроцилиндров. При нажатии одновременно кнопок двух гидроцилиндров Г9 происходит одновременное перемещение гильз гидроцилиндров вдоль щтоков одного и другого гидроцилиндров, т.е. происходит сложение движений.
Вследствие жесткой связи гильз гидроцилиндров 19 с осью 8 движение гильз передается шарнирной руке 3 через щарнирные тяги 6 н 7, при этом вал 10, устаиовлецный на конце шармирной руки, перемещается по траектории подобной траектории движения оси 8, но увеличенной в К раз. Коэффициент увеличения К и подобие указанных траекторий определяются соотношением длин звеньев шарнирной руки с длинами тяг 6 и 7, образующих гаарнирно рычажный механизм пантографа.
Формула изобретения
Манипулятор, содержащий основание, механическ по руку, вынолненную в виде механизма пантографа, консольную направляющую с размещенной на ней основной кареткой, шарнирно связанной с одним из звеньев механизма пантографа, захватный орган, установленный на основной каретке с возможностью осевого перемещения, приводы перемещения механической руки, и захватного органа, о т л и
5
0
чающийся тем, что, с целью расширения зоны обслуживання, он снабжен приводом поворота захзатно- го органа, выполнепнкм в виде сило- вого цилитадра, закрепленного на основании и цзпиых передач, а консольная направляющая установлена с БОЗ мощностью поворота на оси соедипеи1{я одного из механизма пантографа с основанием, причем привод перемещения кехаинческой руки вьшолне в виде рамки,жестко связанной с основанием, и силовых цилиндров с двухсторонними выходньми штоками, ус тановленными взаимно перпендикулярно, выходные штоки которых закреплены на дополнительно вг еденных каретках, размещенньЕХ в направляющих, выполненных в рамкак, при этом корпуса этих силовых цилиндров жестко связаны между собой и с одной из осей механизма пантографа.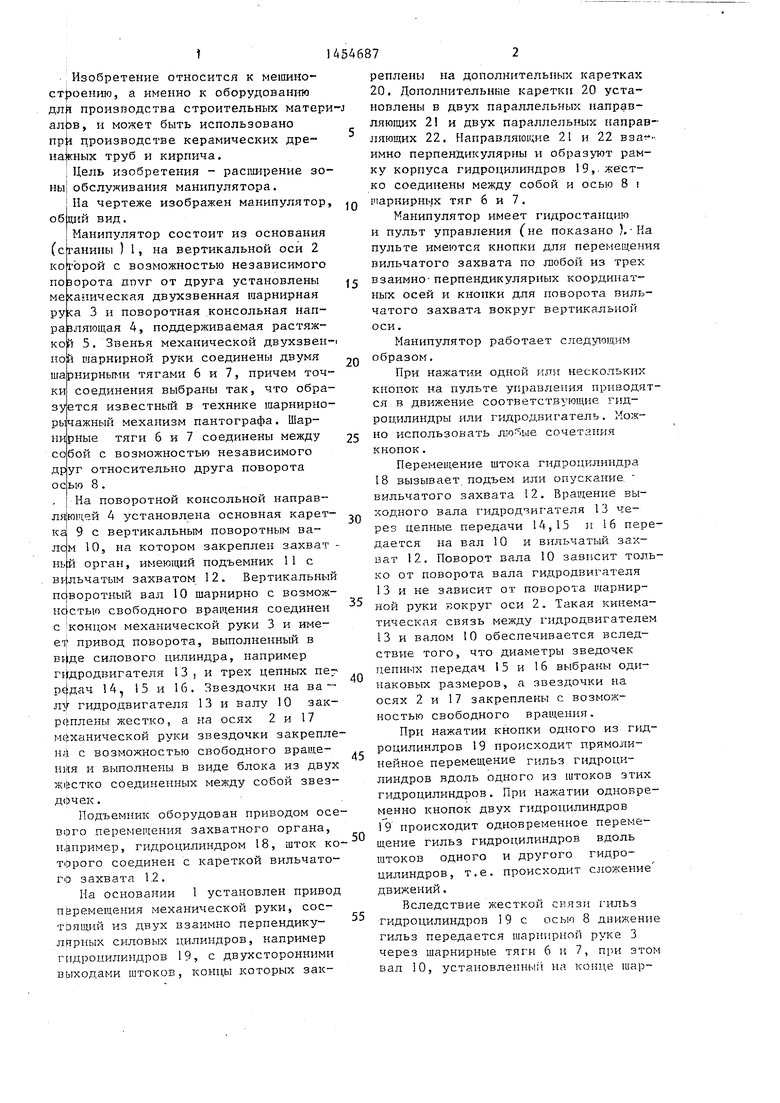
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1990 |
|
SU1764983A1 |
| Клещевая подача к горячештамповочному прессу | 1989 |
|
SU1690920A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| Манипулятор | 1982 |
|
SU1007967A1 |
| ПОГРУЗЧИК "ПРЯМАЯ ЛОПАТА" | 1993 |
|
RU2081052C1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| НАВЕСНОЙ МАНИПУЛЯТОР С ВИЛЬЧАТЫМ ЗАХВАТОМ | 2021 |
|
RU2760476C1 |
| Манипулятор | 1976 |
|
SU538957A1 |
| Манипулятор | 1982 |
|
SU1045992A1 |
| Захватно-срезающее устройство | 1983 |
|
SU1251828A1 |
Изобретение относится к машино- .:троению, а именно к оборудованию для производства строительных материалов, и может быть использовано при производстве керамических дренажных труб и кирпича. Цель изобретения - расширение зоны обслуживания манипулятора. На вертикальной оси 2 основания 1 с возможностью независимого поворота друг QT друга установгг лены механическая рука 3, выполненг ная в виде механизма пантографа, п поворотная консольная направляющая 4. На консольной направляющей 4 установлена основная каретка 9 с вертикальным поворотным валом 10, на котором закреплен захва1:йый орган. Вертикальный поворотный вал 10 шар- нирно соединен с механической рукой 3 и имеет привод поворота, выполненный в виде силового цилиндра 13, трех цепных передач 14, 15 и 16. На основании 1 установлен привод перемещения механической руки, состоящий из двух взаимно перпендикулярных силовых цилиндров 19 с двухсторонними выходами PJTOKOB, концы KOTO-I рых закреплены на дополнительных каретках 20. Эти каретки 20 установлены в двух параллельных направляющих 2 i и двух параллельных направляющих 22, образующих рамку. Корпуса силовых цилиндров 19 жестко соединень между собой и с осью 8..1 ил. (Л СП 4 О 00 а
| ПАРОПЕРЕГРЕВАТЕЛЬ ДЛЯ ТРУБЧАТЫХ ПАРОВЫХ КОТЛОВ С ЭЛЕМЕНТАМИ, СОСТОЯЩИМИ ИЗ ДВУХ ПЕТЕЛЬ, ВВОДИМЫХ В ПРОГАРНЫЕ ТРУБЫ КОТЛА | 1916 |
|
SU281A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
