Изобретение относится к машиностроению, а именно к приводам промышленных роботов.
Целью изобретения является уменьшение весогабаритных характеристик привода за счет устранения промежуточных соединительных элементов в шарнирном соединении торсионных валов и зубчатой планетарно-кривошипной передачи.
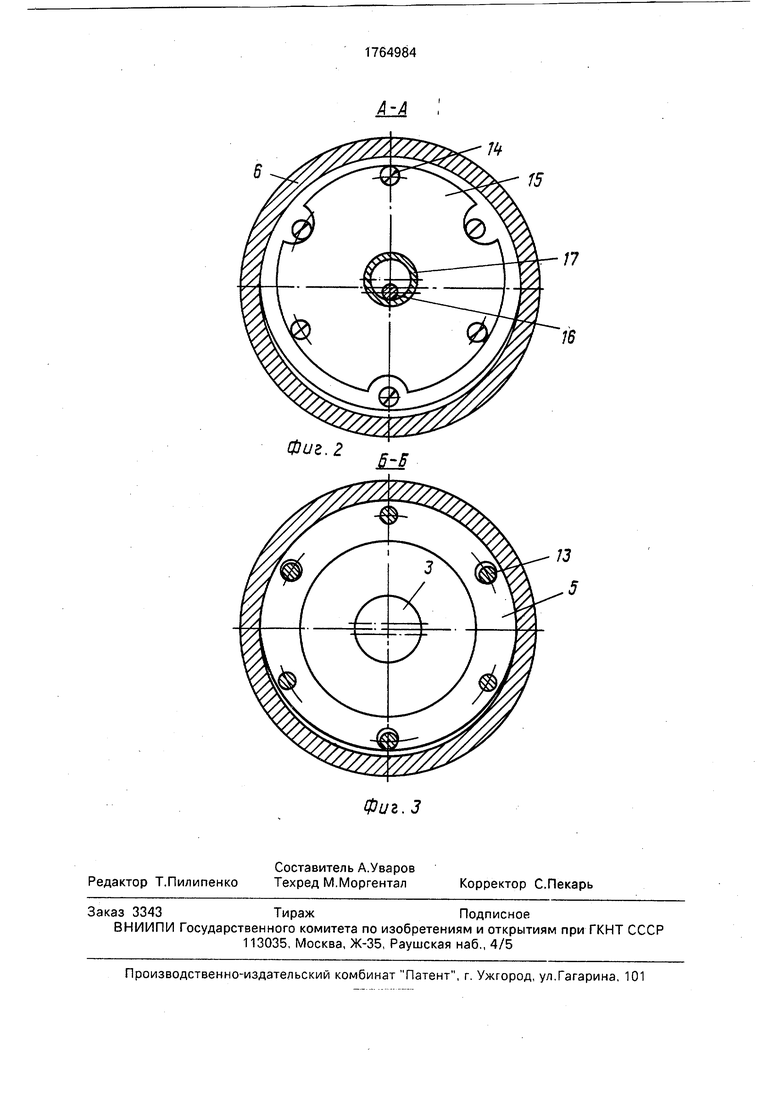
На фиг. 1 представлен вариант исполне- ния привода при двух сателлитах; на фиг. 2 - разрез по А-А на фиг. 1; на фиг 3 - разрез Б-Б на фиг. 1.
На валу электродвигателя 1 закреплена эксцентриковая втулка 2 с развернутыми эксцентриситетами равной величины, на которой в подшипниках 3 установлены сателлиты 4 и 5, зацепляющиеся с центральным зубчатым колесом 6, планетарно-кривошипной передачи 7. В подшипниках 8 в корпусе передачи установлен винт 9 шарико-винто- вой передачи, гайка 10 которой шарнирно присоединена к подвижному звену 11, шарнирно установленному на основании 12. К тому же основанию 12 шарнирно присоеди- нен корпус передачи через тело центрального зубчатого колеса 6.
Сателлиты 4 и 5 снабжены кривошипами 13, причем пальцы идущие от сателлита 5, пропущены через отверстия, выполнен- ные в сателлите 4. Снаружи к кривошипам 13 посредством винтов 14 присоединены плоские мембраны 15, закрепленные на концах торсионных валов 16 и 17. Торсионный вал 17 может быть выполнен полым, тогда внутри его размещается торсионный вал 16, а оба эти вала размещены внутри полого винта 9. Вторые концы валов 16 и 17 снабжены съемными фланцами 18 и 19 с зубчатой насечкой на прилегающих поверх- ностях, Винты 20соединяютфланцы 18 и 19, а также фланец 21, зафиксированный от поворота на винте 9, в один пакет.
Привод работает следующим образом. При включении электродвигателя 1 через эксцентриковую втулку 2 получают вращение сателлиты 4 и 5. Обкатываясь по неподвижному центральному колесу 6, они через кривошипы 13 приводят во вращение торсионные валы 16 и 17 и связанный с ними полый винт 9. В результате вращения винта 9 через шарико-винтовую передачу получает движение выходное звено 11, Для выборки зазоров в зубчатых зацеплениях производится предварительная закрутка торсионного вала 16 относительно торсионного вала 17 и винта 9, связанных вместе фланцами 19 и 21, а затем достигнутое положение фиксируется с помощью винтов 20 и насечек на фланцах 18 и 19.
Технико-экономическое преимущество привода состоит в том, что он характеризуется высокой точностью, имеет малые габариты и малый вес, что при использовании его в манипуляторах обеспечивает высокие точностные и динамические показатели. Формула изобретения Привод подвижного звена, включающий электродвигатель, на валу которого установлена зубчатая планетарно-кривошип- ная передача, в корпусе которой установлено центральное зубчатое колесо, образующее зацепление с двумя сателлитами, кинематически связанными с механизмом параллельных кривошипов этой передачи, а также торсионные валы и шарико-винтовую передачу, винт которой упруго связан с механизмом параллельных кривошипов, а гайка шарнирно связана с подвижным звеном, отличающийся тем, что, с целью уменьшения весогабаритных характеристик привода за счет устранения промежуточных соединительных элементов в шарнирном соединении торсионных валов и зубчатой планетарно-кривошипной передачи, торцы торсионных валов, не связанные с винтом шарико-винтовой передачи, выполнены в виде плоских мембран и шарнирно связаны с кривошипами планетарной передачи, при этом торсионные валы выполнены полыми и установлены внутри винта шарико-винтовой передачи коаксиально последнему.
7
15
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ПОДВИЖНОГО ЗВЕНА | 1988 |
|
SU1690308A1 |
| ЭКСЦЕНТРИКОВАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА ВНУТРЕННЕГО ЗАЦЕПЛЕНИЯ | 2005 |
|
RU2313016C2 |
| МЕХАНИЗМ ПОДАЧИ И ПОВОРОТА СТАНА ХОЛОДНОЙ ПРОКАТКИ ТРУБ | 1999 |
|
RU2207202C2 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ ДВИЖЕНИЕ | 1996 |
|
RU2109998C1 |
| МЕХАНИЗМ РЕГУЛИРОВКИ ХОДА ПОЛЗУНА КРИВОШИПНОГО ПРЕССА | 2002 |
|
RU2223862C2 |
| Стенд для испытания торсионных валов на усталость при кручении | 1980 |
|
SU926552A1 |
| РЕДУКТОРНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2014 |
|
RU2571313C1 |
| Двигатель внутреннего сгорания | 1984 |
|
SU1229398A1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| "Устройство для обработки трехмерных поверхностей | 1973 |
|
SU485850A1 |
Изобретение относится к машиностроению, а именно к приводам промышленных роботов. Целью изобретения является 20 уменьшение весогабаритных характеристик привода за счет устранения промежуточных соединительных элементов в шарнирном соединении торсионных валов и зубчатой планетарно-кривошипной передачи. При вращении выходного вала электродвигателя 1 сателлиты 4, 5 обкатываются по колесу 6 и вызывают вращение через механизм параллельных кривошипов двух торсионных валов 16,17, которые в свою очередь вращают винт 9. При этом гайка 10 вызывает вращение звена 11. 3 ил. VI О Ч) 00 Фиг.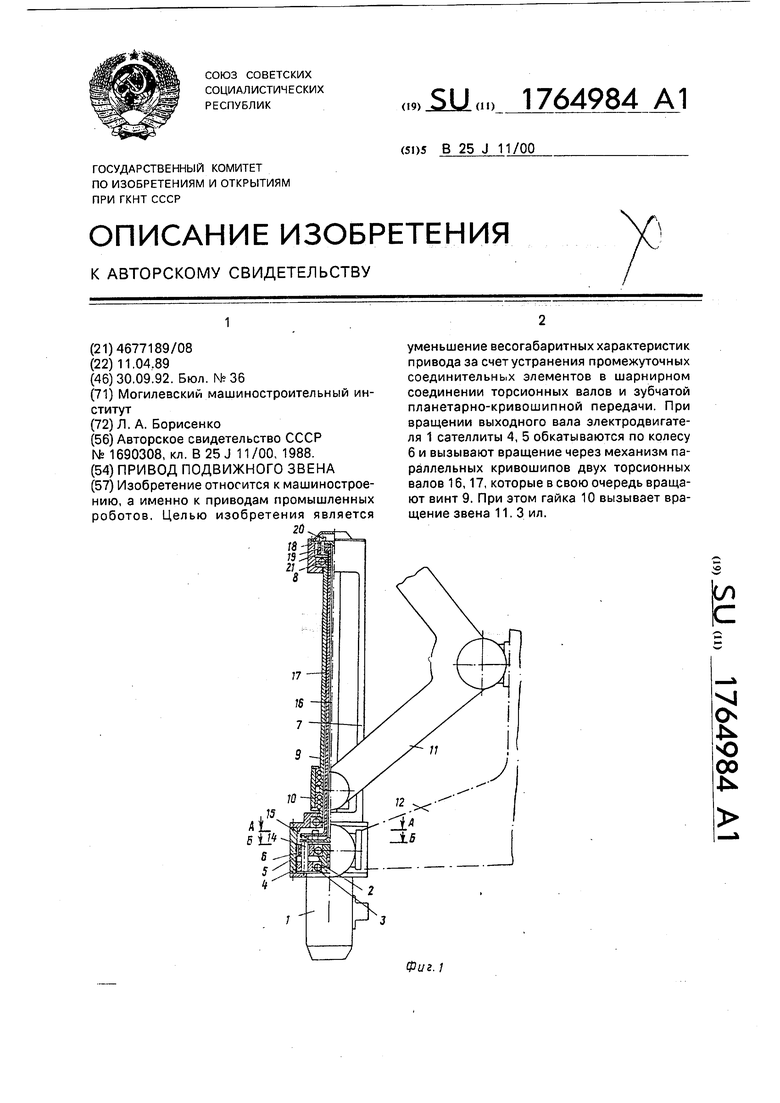
| ПРИВОД ПОДВИЖНОГО ЗВЕНА | 1988 |
|
SU1690308A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
