Изобретение относится к области машиностроения, в частности к средствам гид- ропневмоавтоматики, и может найти применение в системах управления технологических процессов.
Целью изобретения является увеличение числа точек позиционирования.
Сущность изобретения поясняется чертежом, где представлена принципиальная схема привода.
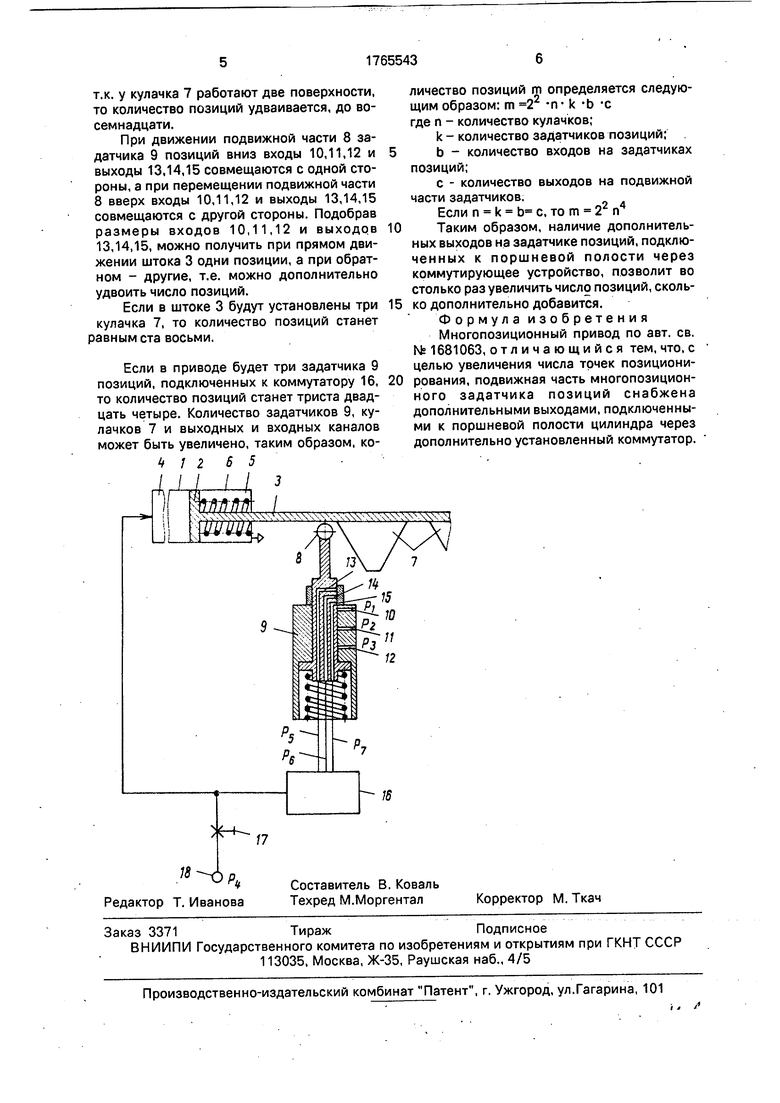
Многопозиционный привод содержит цилиндр 1, поршень 2 со штоком 3, установленные в нем с образованием поршневой и штоковой полостей 4,5, при этом поршень 2 взаимодействует с пружиной 6. На штоке 3 укреплены кулачки 7 с возможностью контакта с подвижной частью 8 многопозицион- ного задатчика 9 позиций, который включает входы 10,11,12 и выходы 13,14,15, расстояние L между последними равно величине одной позиции. Если расстояние между позициями L одинаково, то расстояние между соседними входами 1,11,12 равно gl, где g - количество выходов 13-15. Выходы 13-15 подключены к поршневой полости 4 через коммутатор 16. Поршневая Г полость 4, кроме того, связана через дрос- К/) сель 17 с каналом 18 питания. Количество |f кулачков 7 и задатчиков 9 позиций может JJ быть увеличено, при этом кулачки 7 распо- Ј лагаются на штоке 3 на расстоянии друг от друга равном одной позиции, а задатчики 9 устанавливаются друг от друга на расстоя- ™ нии, равном длине одного кулачка 7 плюс одна позиция, умноженные на количество 0s кулачков 7. Можно и наоборот, между кулач- СЛ ками 7 расположить все задатчики 9 пози- (J ций.|Ч.
Привод работает следующим образом. (л Привод в крайнем левом и правом (по чертежу) положении поршня 2 имеет по од-
ной позиции. В исходном состоянии лор- шень 2 со штоком 3 и кулачком 7 находится iyj в крайнем левом положении. Подвижная часть в задатчике 9 позиций находится в крайнем верхнем (по чертежу) состоянии. Входы 10-12 и выходы 13-15 между собой не соединены.
При подаче сигнала управления Рц (система управления не показана) сжатый воздух через дроссель 17 попадает в поршневую полость 4. Постепенно, в зависимости от проходного сечения дросселя 17, начинает повышаться давление в полости 4. Под воздействием сжатого воздуха поршень 2 со штоком 3 и кулачком 7 начинает перемещаться вправо, сжимая пружину 6. Правая (по чертежу) торцовая поверхность кулачка 7 начинает контактировать с подвижной частью 8 задатчика 9 позиций и опускать ее вниз. Если не подан сигнал управления Pi на вход 10, а выход 15 с помощью коммутатора-16 подключен к поршневой полости 4, то, как только выход 15 соединится с входом 10, из поршневой полости 4 сжатый воздух начнет стравливаться в атмосферу. Давление в поршневой полости 4 перестанет возрастать и поршень 2 со штоком 3 и кулачком 7 перестанут перемещаться, а задатчик 9 позиций приоткроет вход 10 настолько, что наступит равновесное состояние, при котором через дроссель 17 в поршневую полость 4 будет поступать столько воздуха, сколько его будет уходить через вход 10 в атмосферу, при этом шток 3 привода и подвижная часть 8 задатчика 9 позиций перемещаться не будет.
Если необходимо переместить шток 3 в позицию, соответствующую совмещению входа 11 и выхода 14, то необходимо подать сигнал управления на вход 10 или только выход 14 подключить с помощью коммутатора 16 к поршневой полости 4. Так как на вход 10 подан сигнал управления Pi, то из рабочей полости 4 прекращается стравливание сжатого воздуха, а поступление его в полость 4 осуществляется через дроссель 17 из канала 18, так как сигнал управления РА подан. В результате нарушается равновесное состояние и кулачок 7 со штоком 3 начинает перемещаться вправо и опускать подвижную часть 8 задатчика 9 позиций пока выход 14 не совместится со входом 11, на который сигнал управления не подан. При совмещении входа 11 и выхода 14 первый приоткрывается настолько, что наступает равновесное состояние и получение новой позиции.
Если необходимо шток 3 переместить в крайнее правое положение, достаточно выходы 13-15 не подключать к полости 4. В этом случае стравливания сжатого воздуха из полости 4 не будет, шток 3 примет крайнее правое положение. Может быть и другой вариант перемещения штока 3 в крайнее правое положение. Для этого необходимо подать сигнал управления Р1,Р2,Рз на соответствующие входы 10-12, при этом либо выходы 13-15 не подключать к полости 4, либо подключить любой выход 13-15. Так
как во все входы 10,11,12 поданы сигналы управления, то стравливания сжатого воздуха из полости 4 происходить не будет и шток 3 переместится в крайнее правое положе5 ние. Для того, чтобы переместить шток 3 в обратном направлении необходимо отключить сигнал РА управления, при этом канал 18 подключится к атмосфере. Если сигналов управления Pi.Pa.Pa на входы 10-12 не по0 давать, при этом выходы 13-15 могут быть не подключены к полости 4, то шток 3 переместится в крайнее левое положение, так как сжатый воздух из полости 4 стравится через дроссель-17 и канал 18, который под5 ключен к атмосфере.
Если подать сигнал управления Рз на вход 12, а выход 13 подключить к полости 4, то шток 3 примет позицию, когда выход 13 совместится со входом 12. При этом по0 движная часть 8 задатчика 9 позиций будет контактировать с кулачком 7 левой поверхностью около нижней торцовой поверхности.
Если кулачок 7 будет только один, то
5 шток 3 переместится на половину пути. Для перехода работы на другую половину кулачка 7, т.е. когда контактирует его правая поверхность, достаточно сначала шток 3 переместить в крайнее левое положение, а
0 затем вернуть на заданную позицию, где будет работать правая поверхность кулачка 7. Можно и не перемещать шток 3 в крайнее левое положение. Если необходимо сформировать новую позицию путем перемеще5 ния штока 3 влево и совмещения входа 12с выходом 14 при контакте с правой поверхностью кулачка 7 достаточно к полости 4 подключить выход 14. Так как на вход 12 ранее поступал сигнал управления Рз, то
0 при отключении выхода 13 от полости 4 сигнал управления через выход 14 вначале поступать не будет. В полости 4 начнет падать давление за счет стравливания его в атмосферу через дроссель 17. Поршень 2 под си5 ловым воздействием пружины 6 начнет перемещать шток 3 с кулачком 7 влево. При этом подвижная часть 8 задатчика 9 сначала опустится вниз и, скользя по нижней торцевой поверхности движущегося кулачка 7
0 влево, окажется на правой торцевой поверхности. Так как кулачок 7 продолжает двигаться влево, то подвижная часть 8 задатчика 9 начнет подниматься вверх и выход 14 совместится со входом 12. В полость
5 4 поступит сжатый воздух и шток 3 остановится, т.к. наступит равновесное состояние. Таким образом, предложенный привод при одном кулачке 7 и при одном задатчике 9 позиций, у которого три входа 10,11,12 и
три выхода 13,14,15 имеют девять позиций,
т.к. у кулачка 7 работают две поверхности, то количество позиций удваивается, до восемнадцати.
При движении подвижной части 8 за- датчика 9 позиций вниз входы 10,11,12 и выходы 13,14,15 совмещаются с одной стороны, а при перемещении подвижной части 8 вверх входы 10,11,12 и выходы 13,14,15 совмещаются с другой стороны. Подобрав размеры входов 10,11,12 и выходов 13,14,15, можно получить при прямом движении штока 3 одни позиции, а при обратном - другие, т.е. можно дополнительно удвоить число позиций.
Если в штоке 3 будут установлены три кулачка 7, то количество позиций станет авным ста восьми.
Если в приводе будет три задатчика 9 позиций, подключенных к коммутатору 16, то количество позиций станет триста двадцать четыре. Количество задатчиков 9, кулачков 7 и выходных и входных каналов может быть увеличено, таким образом, ко4 ; г в 5 III
Редактор Т. Иванова
Составитель В. Коваль Техред М.Моргентал
0
личество позиций m определяется следующим образом:m 22 -n- k -b -с где п - количество кулачков;
к - количество задатчиков позиций; b - количество входов на задатчиках
позиций;
с - количество выходов на подвижной части задатчиков.
Если п к Ь с, то m 2 п 0 Таким образом, наличие дополнительных выходов на задатчике позиций, подклю- ченных к поршневой полости через коммутирующее устройство, позволит во столько раз увеличить число позиций, сколь- 5 ко дополнительно добавится.
Формула изобретения Многопозиционный привод по авт. св. № 1681063, отлича ющийся тем, что, с целью увеличения числа точек позиционирования, подвижная часть многопозиционного задатчика позиций снабжена дополнительными выходами, подключенными к поршневой полости цилиндра через дополнительно установленный коммутатор.
Корректор М. Ткач
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный привод | 1989 |
|
SU1681063A1 |
| Привод | 1990 |
|
SU1761982A1 |
| Устройство для дозирования жидкости | 1990 |
|
SU1811602A3 |
| Устройство для измерения перемещений | 1990 |
|
SU1783295A1 |
| Пневматический задатчик давления | 1990 |
|
SU1789745A1 |
| Многопозиционный привод | 1988 |
|
SU1504380A1 |
| Устройство для измерения линейных размеров | 1990 |
|
SU1768968A1 |
| Пневматическое устройство для селектирования аналоговых сигналов | 1989 |
|
SU1674160A1 |
| Пневматический генератор непрерывного линейноизменяющегося давления | 1989 |
|
SU1644173A1 |
| Адаптивный захватный модуль промышленного робота | 1989 |
|
SU1689063A1 |
Изобретение м.б. использовано в системах управления технологических процессов. Цель изобретения - увеличение числа точек позиционирования. Подвижная часть 8многопозиционного задатчика 9 позиций снабжена выходами 13-15, подключенными к поршневой полости 4 через коммутатор 16. При одном кулачке 7 и одном задатчике 9позиций, у которого три входа 10-12 и три выхода 13-15, привод позволяет обеспечить до восемнадцати позиций. 1 ил.
| Многопозиционный привод | 1989 |
|
SU1681063A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
