Изобретение откосится к машиностроению и может быть использовано в пневмоприводах роботов и манипуляторов.
Цель изобретения - упрощение конструкции при увеличении числа рабочих позиций.
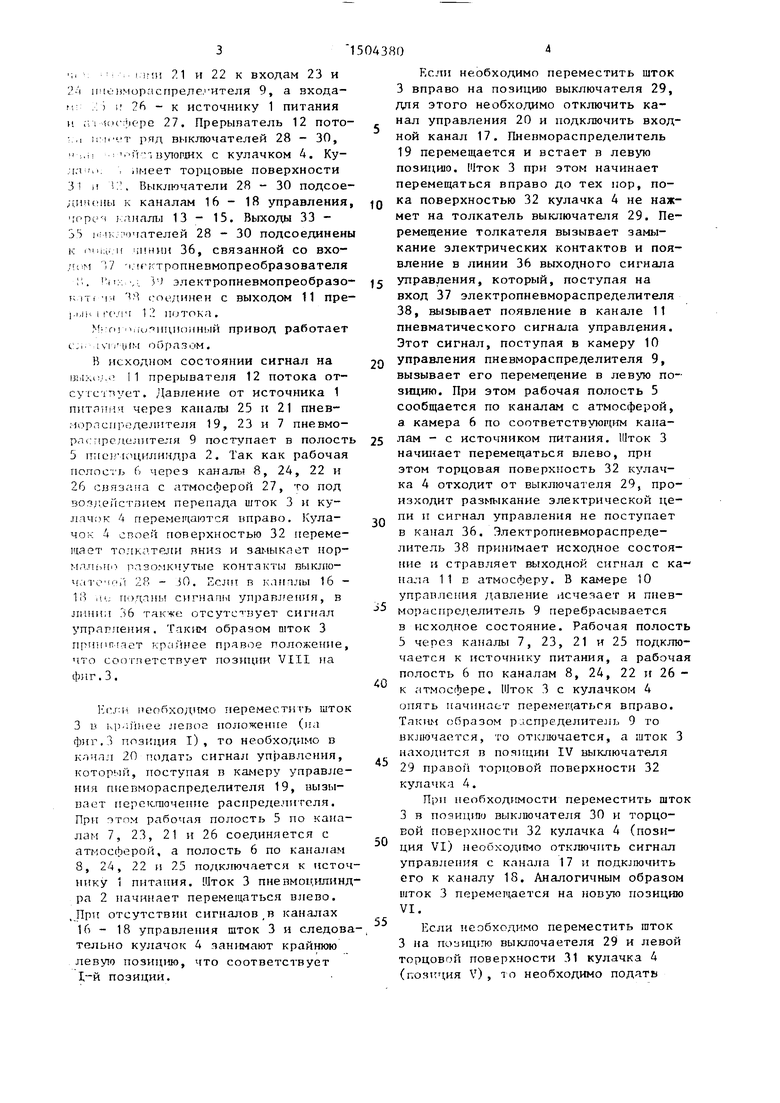
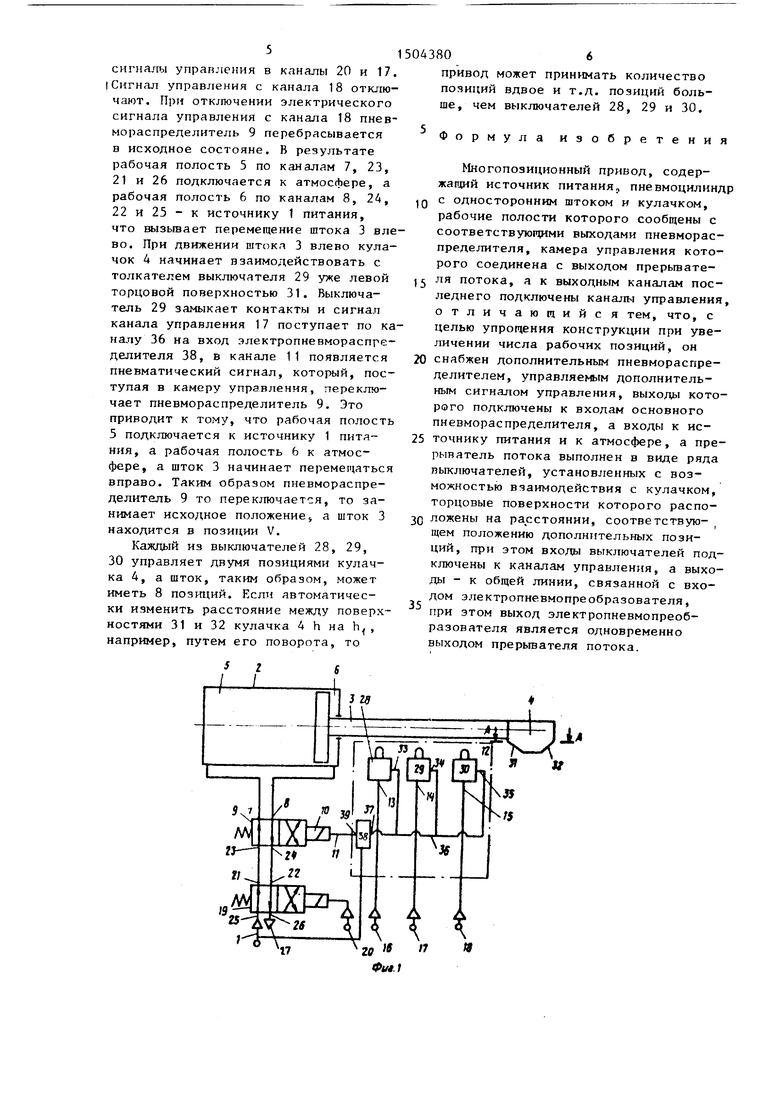
На фиг.1 представлена схема многопозиционного привода; на фиг.2 - разрез на фиг.1 (пример выполнения кулачка); на фиг.З - схема рабочих позиций.
Многопозиционннй привод содержит источник 1 питания, пневмоцилиндр 2 с односторонним штоком 3 и Kyjfa4KoM 4. Полости 5 и 6 сообгцены с соответствующими выходами 7 и 8 пневморпс- пределителя 9, камера 10 управления соединена с каналом 11 прерывателя 12 потока. К входным каналам 13 - 15 подключены каналы 16 - 18 управления. Дополнительный пневморлспре- делитель 19, управляемый дополнительным каналом управления 20, под клю I 21 и 22 к входам 23 и )морг1спреле.1 ителя 9, а входа- .: j 1г 2ft - к источнику 1 питания ; 1 кх-ферс 27. Прерьшатель 12 пото- i:i., T ряд выключателей 28 - 30, II ).., вугагдих с кулачком 4, Ку- м. : iif-seeT торцовые поверхности и К . Выключатели 28 - 30 подсое ди И иы к каналам 16 - 18 управления И реч }:аиалы 13 - 15. Выходы 33 - 35 |1мк.;)чателей 28 - 30 подсоединен iv , и 36, связанной со вхо- ;i( M М I.((чстропневмопреобразователя
г.. м:, ,;. V) электропневмопреобраэо т; IT. ми Я соединен с выходом 11 пре 1.1,1И I (Ч .пч 1 2 потока .
М-:о ii4j iiiu t)i(Hbift привод работает
С:.|. I, VI ГЧИМ )ЛЗОМ .
в исход)юм состоянии сигнал на i3biAi:;,o 11 прерывателя 12 потока от- сугстпует. Давление от источника 1 пита11 1я через каналы 25 и 21 пнев- морпспределителя 19, 23 и 7 пневмо- рл(:г1редел теля 9 поступает в полост 5 п1 с Г1оцилиндра 2. Так как рабочая iTonoc i b 6 через каналь 8, 24, 22 и 26 связана с атмосферой 27, то под возде1 ст;зием перепада шток 3 и кулачок 4 перемещаются вправо. Кулачок 4 своей поверхностью 32 перемещает толкл.телп пннз и замыкает нор- мл.пьпо разомкнутые контакты выклю- чаточп, | 28 - JO. Если в каналы 16 - 18 ,и; Г1ода}1ы спгнапы у11рав:гения, в ЛИНИ; 36 также отсутс вует сигяал упраЕле)ия. Такям обраяом шток 3 прпшпг.чет крайнее правое положение, что соотлетствует no3int,iiH VIII на фиг.3.
neo5xojT,irMo переместигь шток i-. легзоа положение (на , 3 позиция I), то необходимо в
3 и фиг
качал 20 подать сигнал управления, который, поступая в камеру ynpaBJie- ния пиевмораспределителя 19, вызывает Г1ере1 :.пючен11е распределителя. При этом рабочая полость 5 по каналам 7, 23, 21 и 26 соединяется с атмосферой, а полость 6 по каналам 8, 24, 22 и 25 подключается к источнику 1 питания. Шток 3 пненмоцилинд ра 2 начинает перемегдаться влево. ,При отсутствии сигналов,в каналах 16 - 18 управления шток 3 и следовательно кулачок 4 занимают крайнюю левую позицию, что соответствует 1-й позиции.
5
Если необходимо переместить шток 3 вправо на позицию выключателя 29, для этого необходимо отключить канал управления 20 и подключить входной канал 17. Пневмораспределитель 19 перемещается и встает в левую позицию. Шток 3 при этом начинает перемещаться вправо до тех пор, пока поверхностью 32 кулачка 4 не нажмет на толкатель выключателя 29. Перемещение толкателя вызывает замыкание электрических контактов и появление в линии 36 выходного сигнала
5 управления, который, поступая на вход 37 электропневмораспределителя 38, вызьгоает появление в канале 11 пневматического сигнала управления. Этот сигнал, поступая в камеру 10
0 управления пневмораспределителя 9, вызывает его перемещение в левую позицию. При этом рабочая полость 5 сообщается по каналам с атмосферой, а камера 6 по соответствующим каналам - с источником питания. Шток 3 перемещаться влево, при этом торцовая поверхность 32 кулачка 4 отходит от выключателя 29, про- изходит размыкание электрической цепи II сигнал управления не поступает в канал 36. Электропневмораспреде- литель 38 принимает исходное состояние и стравляет выходной сигнал с канала 11 Е атмосферу. В камере 10 управления давление исчезает и пнев- мораспределитель 9 перебрасывается в исходное состояние. Рабочая полость 5 через каналы 7, 23, 21 и 25 подключается к источнику питания, а рабочая полость 6 по каналам 8, 24, 22 и 26 - к атмосфере. Шток 3 с кулачком 4 опять начинает пс реме 1гатьгя вправо. TaKiU f образом распределитель 9 то включается, то отключается, а шток 3 находится в позиции IV выключателя 29 правой торцовой поверхности 32 кулачка 4.
При необход1 мости переместить шток 3 в позиц по выкааэчателя 30 и торцовой поверхности 32 кулачка 4 (позиция VI) 1еобходимо отключить сигнал управления с канала 17 и подключить его к каналу 18. Аналогичным образом шток 3 перемеп;ается на новую позицию VI.
Если необходимо переместить шток 3 на позицию выкхпочаетеля 29 и левой торцовой поверхности 31 кулачка 4 (позиция V), 1о необходимо подать
0
5
0
5
0
5
51
игналы упрапления в каналы 20 и 17, игнал управления с канала 18 отключают. При отключении электрического сигнала управления с канала 18 пнев- мораспределитель 9 перебрасывается а исходное состояне. В результате рабочая полость 5 по каналам 7, 23,
21и 26 подключается к атмосфере, а рабочая полость 6 по каналам 8, 2А,
22я 25 - к источнику 1 питания,
что вызывает перемещение штока 3 влево. При движении штокл 3 влево кулачок 4 начинает взаимодействовать с толкателем выключателя 29 уже левой торцовой поверхностью 31. Выключатель 29 замыкает контакты и сигнал канала управления 17 поступает по каналу 36 на вход электропневмораспре- делителя 38, в канале 11 появляется пневматический сигнал, который, поступая в камеру управления, переключает пневмораспределитель 9. Это приводит к тому, что рабочая полость 5 подключается к источнику 1 питания, а рабочая полость 6 к атмосфере, а шток 3 начинает перемещаться вправо. Таким образом пневмораспределитель 9 то переключается, то занимает исходное положениеJ а шток 3 находится в позиции V.
Каждый из выключателей 28, 29, 30 управляет двумя позициями кулачка 4, а шток, таким образом, может иметь 8 позиций. Если автоматически изменить расстояние между поверхностями 31 и 32 кулачка 4 h на h, например, путем его поворота, то
043806
привод может принимать количество позиций вдвое и т.д. позиций больше, чем выключателей 28, 29 и 30.
Формула изобретения
Многопозиционный привод, содержащий источник питания,, пневмоцилиндр
д с односторонним штоком и кулачком, рабочие полости которого сообщены с соответствующими выходами пневморас- пределителя, камера управления которого соединена с выходом прерьтате15 ля потока, а к выходным каналам последнего подключены каналы управления, отличающийся тем, что, с целью упрощения конструкции при увеличении числа рабочих позиций, он
20 снабжен дополнительным пневмораспре- делителем, управляемым дополнительным сигналом управления, выходы которого подключены к входам основного пневмораспределителя, а входы к ис25 точнику питания и к атмосфере, а прерыватель потока выполнен в виде ряда выключателей, установленных с возможностью взаимодействия с кулачком, торцовые поверхности которого распоЗс ложены на ра сстоянии, соответствующем положению дополнительных позиций, при этом входы выключателей подключены к каналам управления, а выходы - к общей линии, связанной с входом электропневмопреобразователя, при этом выход электропневмопреобразователя является одновременно выходом прерывателя потока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный привод | 1984 |
|
SU1145175A1 |
| Установка для окраски каблуков (ее варианты) | 1983 |
|
SU1214076A1 |
| Автомат для обработки отверстий в деталях | 1986 |
|
SU1342679A1 |
| Устройство для маркировки изделий | 1984 |
|
SU1348221A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
| Силовой цилиндр | 1982 |
|
SU1110949A1 |
| ПЯТИЛИНЕЙНЫЙ ДВУХПОЗИЦИОННЫЙ КЛАПАННЫЙ ПНЕВМОРАСПРЕДЕЛИТЕЛЬ ПРИВОДА ДВЕРЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2269039C1 |
| Устройство для вскрытия аэрозольных баллонов | 1981 |
|
SU1034992A1 |
| Паровоздушный молот простого действия | 1978 |
|
SU817142A1 |
| Фильтрующее устройство | 1986 |
|
SU1327929A1 |
Изобретение может быть использовано в пневмоприводах роботов и манипуляторов. Цель изобретения - упрощение конструкции при увеличении числа рабочих позиций. Многопозиционный привод содержит источник 1 питания, пневмоцилиндр 2 с односторонним штоком 3 и кулачком 4, два параллельно установленных пневмораспределителя 9 и 19, прерыватель 12 потока, выход 39 которого связан с камерой 10 управления. Кулачок 4 имеет торцовые поверхности 31 и 32. К выключателям 28-30 подключены каналы 16-18 управления. При необходимости переместить шток 3 вправо на позицию выключателя 29 нужно подать сигнал в канал 17 управления. Давление питания через пневмораспределитель 9 подводится к поршневой полости пневмоцилиндра. Шток 3 будет перемещаться вправо до тех пор, пока поверхностью 32 кулачка 4 не нажмет на толкатель выключателя 29. Перемещение толкателя вызовет замыкание электрических контактов и появление сигнала управления, который переключит пневмораспределитель 9 в левую позицию. Поршневая полость пневмоцилиндра сообщится с атмосферой, а штоковая полость - с источником 1 питания. Шток 3 начнет перемещаться в противоположную сторону и разомкнет контакты. Пневмораспределитель 9 займет свою исходную позицию. Таким образом распределитель 9 будет то включаться, то отключаться. 3 ил.
Фиг. 2
XJ x
,-A
3f
±
HL
.
1
J
гi:-
TSг
s-H
| Многопозиционный привод | 1984 |
|
SU1145175A1 |
| кл | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
