/
«
Ё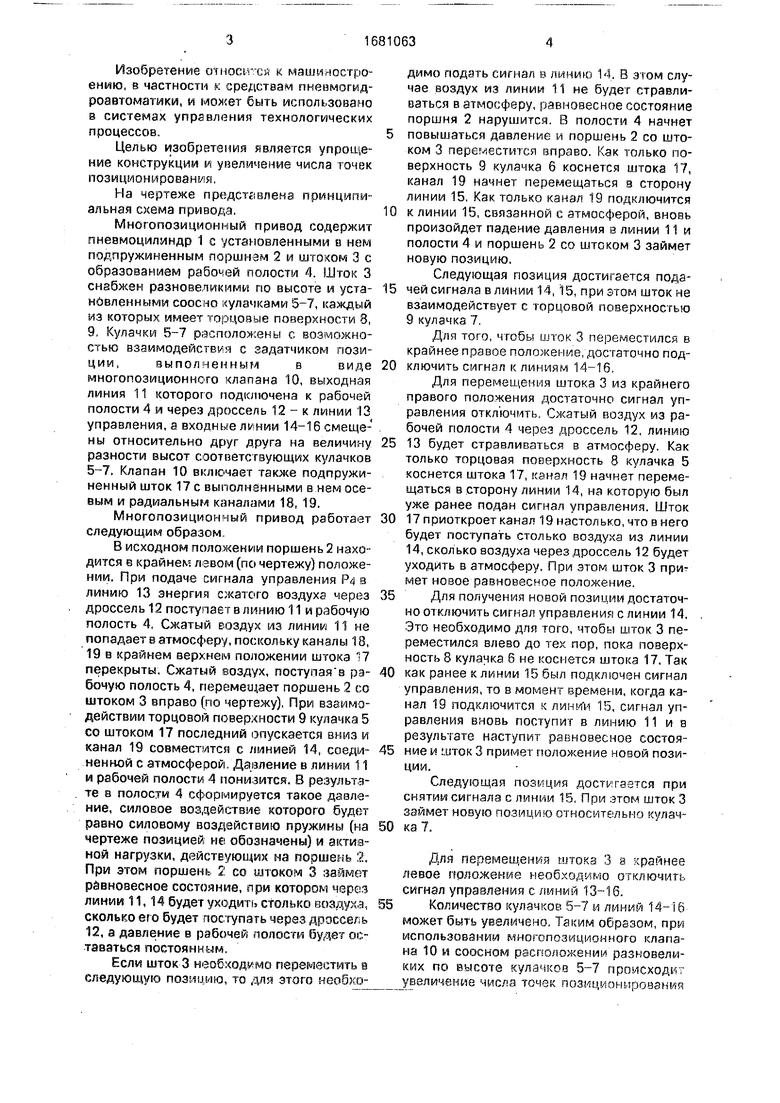

| название | год | авторы | номер документа |
|---|---|---|---|
| Многопозиционный привод | 1989 |
|
SU1765543A2 |
| Многопозиционный привод | 1988 |
|
SU1504380A1 |
| Привод | 1990 |
|
SU1761982A1 |
| Устройство для измерения линейных размеров | 1990 |
|
SU1768968A1 |
| Пневматическое устройство для селектирования аналоговых сигналов | 1989 |
|
SU1674160A1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ С ОТКЛЮЧАЕМЫМИ ЦИЛИНДРАМИ | 1997 |
|
RU2116484C1 |
| Многопозиционный пневмопривод | 1980 |
|
SU877158A1 |
| Многопозиционный привод | 1988 |
|
SU1588928A1 |
| Устройство для измерения перемещений | 1990 |
|
SU1783295A1 |
| Привод | 1991 |
|
SU1827448A1 |
Изобретение м.б. использовано в системах управления технологическими процессами. Цель изобретения - упрощение конструкции и увеличение числа точек позиционирования. Шток 3 пневмоцилиндра 1 снабжен разновеликими по высоте и соосно установленными кулачками 5-7 с возможностью взаимодействия с задатчиком позиции, выполненным в виде многопозиционного клапана 10, выходная линия (Л) 11 которого подключена к рабочей полости 4 и через дроссель 12 - к Л 13 управления, а входные Л 14-16 смещены относительно друг друга на величину разности высот соответствующих кулачков 5-7. Л 13-16 подключаются или к атмосфере, или в них подается сигнал управления. В зависимости от комбинаций подключенных к сигналу управления Л 13-16 шток 3 занимает ту или иную позицию. 1 ил.
о. со
о о
OJ
Изобретение относится машиностроению, в частности к средствам пневмогид- роавтоматики, и может быть использовано в системах управления технологических процессов.
Целью изобретения является упрощение конструкции и увеличение числа точек позиционирования.
На чертеже представлена принципиальная схема привода.
Многопозиционный привод содержит пневмоцилмндр 1 с установленными в нем подпружиненным поршнем 2 и штоком 3 с образованием рабочей полости А. Шток 3 снабжен разновеликими по высоте и установленными соосно кулачками 5-7, каждый из которых имеет торцовые поверхности 8, 9, Кулачки 5-7 расположены с возможностью взаимодействия с задатчиком позиции,выполненным в виде многопозиционного клапана 10, выходная линия 11 которого подключена к рабочей полости 4 и через дроссель 12 - к линии 13 управления, а входные линии 14-16 смещены относительно друг друга на величину разности высот соответствующих кулачков 5-7. Клапан 10 включает также подпружиненный шток 17с выполненными в нем осевым и радиальным каналами 18, 19.
Многопозиционный привод работает следующим образом.
В исходном положении поршень 2 находится в крайнем левом (по чертежу) положении. При подаче сигнала управления РА в линию 13 энергия сжатого воздуха через дроссель 12 поступает в линию 11 и рабочую полость 4. Сжатый воздух из линии 11 не попадает в атмосферу, поскольку каналы 18, 19 в крайнем верхнем положении штока 17 перекрыты. Сжатый воздух, поступая в рабочую полость 4, перемещает поршень 2 со штоком 3 вправо (по чертежу), При взаимодействии торцовой поверхности 9 кулачка 5 со штоком 17 последний опускается вниз и канал 19 совместится с линией 14, соединенной с атмосферой. Давление в линии 11 и рабочей полости 4 понизится. В результате в полости 4 сформируется такое давление, силовое воздействие которого будет равно силовому воздействию пружины (на чертеже позицией не обозначены) и активной нагрузки, действующих на поршень 2. При этом поршень 2 со штоком 3 займет равновесное состояние, при котором через линии 11,14 будет уходить столько воздуха, сколько его будет поступать через дроссель 12, а давление в рабочей полости будет оставаться постоянным.
Если шток 3 необходимо переместить в следующую позицию, то для этого необходимо подать сигнал в линию 14. В этом случае воздух из линии 11 не будет стравливаться в атмосферу, равновесное состояние поршня 2 нарушится. В полости 4 начнет
повышаться давление и поршень 2 со штоком 3 переместится вправо. Как только поверхность 9 кулачка 6 коснется штока 17, канал 19 начнет перемещаться в сторону линии 15. Как только канал 19 подключится
к линии 15, связанной с атмосферой, вновь произойдет падение давления в линии 11 и полости 4 и поршень 2 со штоком 3 займет новую позицию.
Следующая позиция достигается подачей сигнала в линии 14,15, при этом шток не взаимодействует с торцовой поверхностью 9 кулачка 7.
Для того, чтобы шток 3 переместился в крайнее правое положение, достаточно подключить сигнал к линиям 14-16,
Для перемещения штока 3 из крайнего правого положения достаточно сигнал управления отключить. Сжатый воздух из рабочей полости 4 через дроссель 12, линию
13 будет стравливаться в атмосферу. Как только торцовая поверхность 8 кулачка 5 коснется штока 17, канал 19 начнет перемещаться в сторону линии 14, на которую был уже ранее подан сигнал управления. Шток
17 приоткроет канал 19 настолько, что в него будет поступать столько воздуха из линии 14, сколько воздуха через дроссель 12 будет уходить в атмосферу. При этом шток 3 примет новое равновесное положение.
Для получения новой позиции достаточно отключить сигнал управления с линии 14. Это необходимо для того, чтобы шток 3 переместился влево до тех пор, пока поверхность 8 кулачка 6 не коснется штока 17. Так
как ранее к линии 15 был подключен сигнал управления, то в момент времени, когда канал 19 подключится к лин1/Ги 15, сигнал управления вновь поступит в линию 11 и в результате наступит равновесное состояние и шток 3 примет положение новой позиции.
Следующая позиция достигается при снятии сигнала с линии 15. При этом шток 3 займет новую позицию относительно кулачка 7.
Для перемещения штока 3 в крайнее левое положение необходимо отключить сигнал управления с линий 13-16.
Количество кулачков 5-7 и линий 14-16 может быть увеличено. Таким образом, при использовании многопозиционного клапана 10 и соосном расположении разновеликих по высоте кулачков 5-7 происходит
увеличение числа точек позиционирования
при упрощении конструкции эадатчикз позиции.
Формула изобретения Многопоэиционный привод, содержащий пневмоцилиндр, шток которого снабжен кулачками, установленными с возможностью взаимодействия с задатчи- ком позиции, включающий входные и выходные линии и линию управления с дросселем, отличающийся тем,что,
0
с целью упрощения конструкции и увеличения числа точек позиционирования, кулачки выполнены разновеликими по высоте и установлены соосно, а задатчик позиции выполнен в виде многопозиционного клапана, выходная линия которого подключена к рабочей полости пневмоцилиндра, а выходные линии смещены относительно друг друга на величину разности высот соответствующих кулачков.
| Многопозиционный привод | 1988 |
|
SU1588928A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
