Изобретение относится к технике медико-биологических исследований, в частности к электрофизиологической и микрохирургической аппаратуре, и может быть использовано в биофизических и электрофизических экспериментах на биологических тканях, животных и растительных клетках, в микрохирургии.
Целью изобретения является расширение возможности дистанционного управления перемещением микроинструмента, снижение габаритов и повышение надежности.
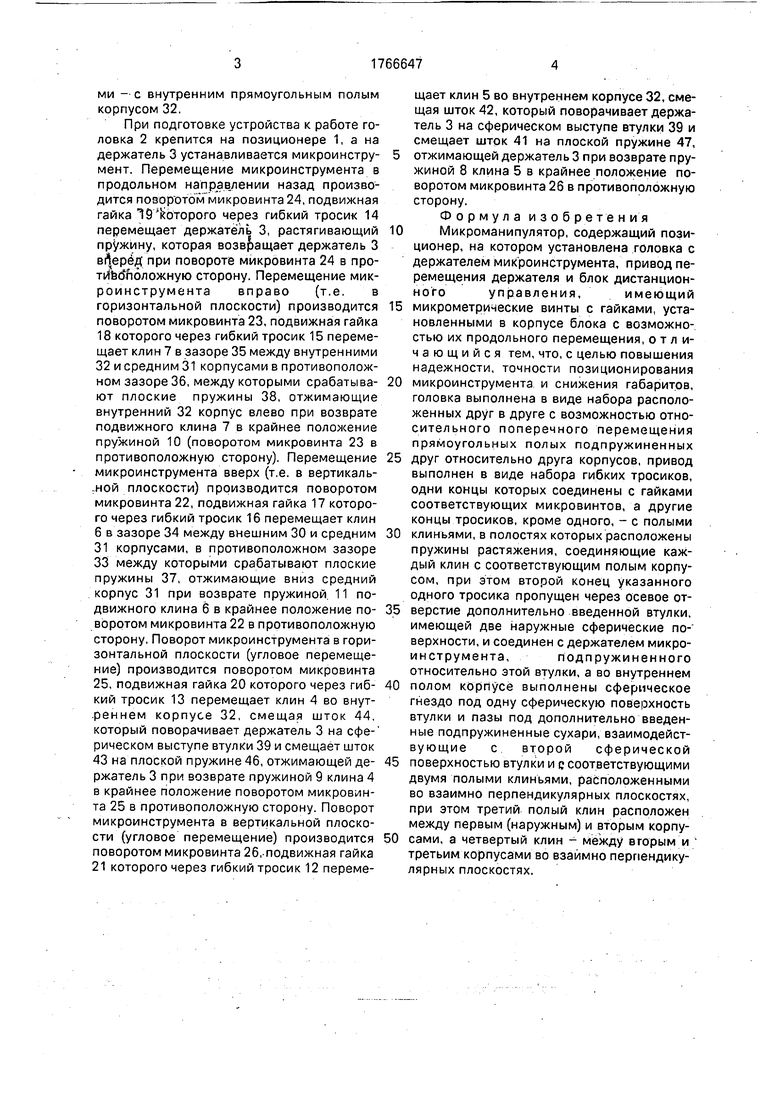
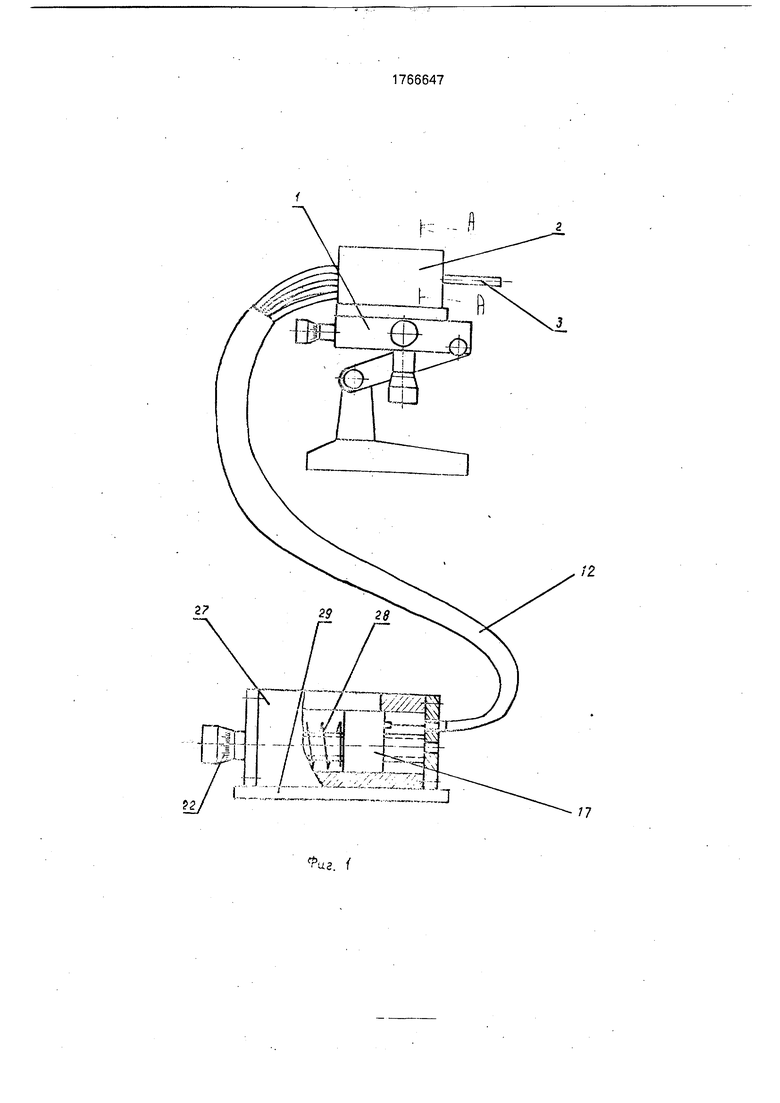
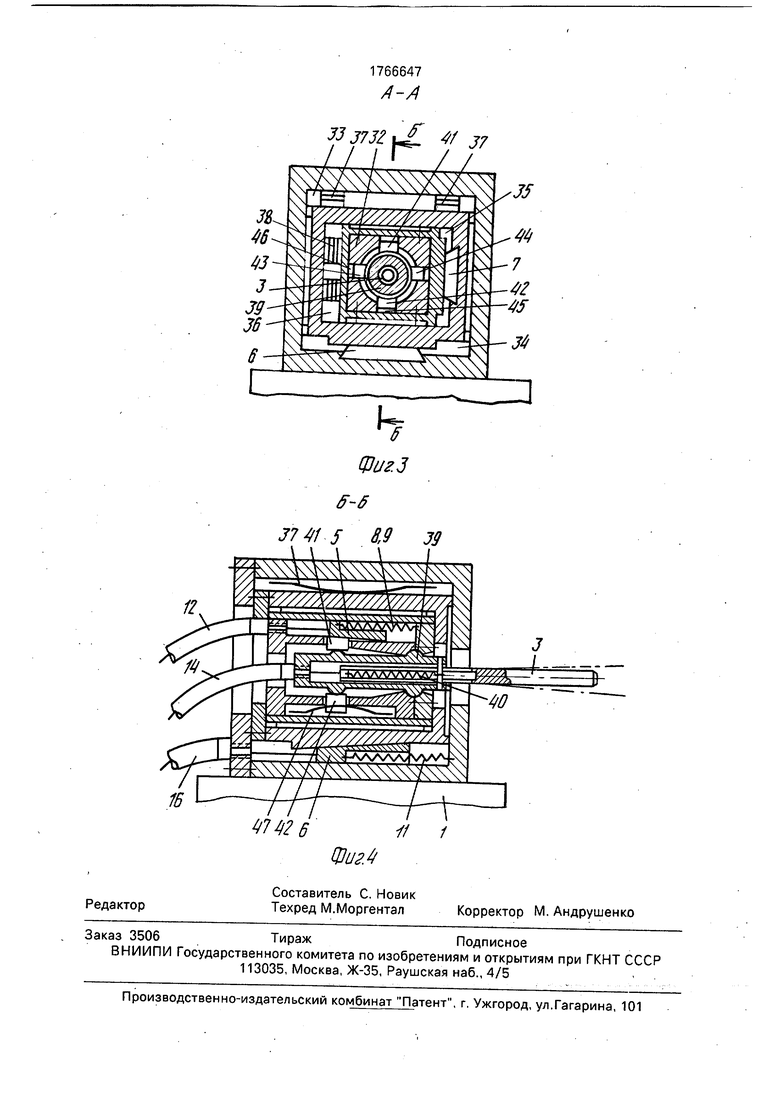
На фиг.1 представлен микроманипулятор в сборе; на фиг.2 - механический привод; на фиг.З - разрез А-А на фиг.1: на фиг.4 - разрез Б-Б на фиг.З.
Микроманипулятор состоит из позиционера 1 (поворотного стола), на котором расположена головка 2 с держателем 3 одного микроинструмента, который приводится в движение механическим приводом, состоящим из подвижных полых клиньев 4,5,6 и 7, в полостях которых расположены соединенные в ними пружины 8,9,10 и 11 растяжения, и гибких тросиков 12,13,14,15 и 16, одни концы которых соединены с подвижными полыми клиньями 4,5,6 и 7, а другие - с подвижными гайками 17, 18, 19, 20 и 21 микровинтов 22, 23, 24, 25 и 26, установленных в корпусе 27 на пружинах 28 сжатия блока 29 дистанционного управления. Головка микроманипулятора состоит из трех вложенных друг в друга прямоугольных полых корпусов 30, 31 и 32, В зазорах 33 и 34 между средним 31 и внешним 30 полыми прямоугольными корпусами и в двух зазорах 35 и 36 между средним 31 и внутренним 32 полыми прямоугольными корпусами расположены плоские пр ужины 37 и 38 сжатия и соответственно подвижные полые клинья 6 и 7. В полости клина 6 расположена пружина 11 растяжения, одним концом соединенная с этим клином, а другим - с внешним полым прямоугольным корпусом 30. В полости клина 7 расположена пружина 10 растяжения, одним концом соединенная с этим клином, а другим - со средним потым прямоугольным корпусом 31. Во внутреннем прямоугольном полом корпусе 32 расположена втулка 39, имеющая два наружных сферических выступа. Внутри втулки 39 расположен держатель 3 микроинструмента. Втулка 39 и держатель 3 образуют цилиндрическую поступательную пару, элементы которой соединены между собой пружиной 40 растяжения, расположенной вн/три полости держателя 3, а сам держатель 3 соединен с гибким тросиком 14. Конец вгулки 39 с одним сферическим выступом расположен между четырьмя подвижными штоками 41, 42, 43 и 44, два из которых - штоки 42 и 43 соединены с ппоскими пружинами 45 и 46 сжатия, а два доугих - шгоки 41 и 44 контактируют с подвижными полыми клиньями 4 и 5 механического привода, причем пружины 8 и 9, расположенные в клиньях 4 и 5, соединены с этими клиньями, а вторыми конца(Л
С
х|
С О
О -N XI
ми - с внутренним прямоугольным полым корпусом 32.
При подготовке устройства к работе головка 2 крепится на позиционере 1, а на держатель 3 устанавливается микроинструмент. Перемещение микроинструмента в продольном направлении назад производится поворотом микровинта 24, подвижная гайка 19 которого через гибкий тросик 14 перемещает держатель 3, растягивающий пружину, которая возвращает держатель 3 вперёд при повороте микровинта 24 в про- тйЧЭбположную сторону. Перемещение микроинструмента вправо (т.е. в горизонтальной плоскости) производится поворотом микровинта 23, подвижная гайка 18 которого через гибкий тросик 15 перемещает клин 7 в зазоре 35 между внутренними
32и средним 31 корпусами в противоположном зазоре 36, между которыми срабатывают плоские пружины 38, отжимающие внутренний 32 корпус влево при возврате подвижного клина 7 в крайнее положение пружиной 10 (поворотом микровинта 23 в противоположную сторону). Перемещение микроинструмента вверх (т.е. в вертикальной плоскости) производится поворотом микровинта 22, подвижная гайка 17 которого через гибкий тросик 16 перемещает клин 6 в зазоре 34 между внешним 30 и средним 31 корпусами, в противоположном зазоре
33между которыми срабатывают плоские пружины 37, отжимающие вниз средний корпус 31 при возврате пружиной 11 подвижного клина 6 в крайнее положение поворотом микровинта 22 в противоположную сторону. Поворот микроинструмента в горизонтальной плоскости (угловое перемещение) производится поворотом микровинта 25, подвижная гайка 20 которого через гибкий тросик 13 перемещает клин 4 во внутреннем корпусе 32, смещая шток 44, который поворачивает держатель 3 на сферическом выступе втулки 39 и смещает шток 43 на плоской пружине 46, отжимающей держатель 3 при возврате пружиной 9 клина 4 в крайнее положение поворотом микровинта 25 в противоположную сторону. Поворот микроинструмента в вертикальной плоскости (угловое перемещение) производится поворотом микровинта 26, подвижная гайка 21 которого через гибкий тросик 12 перемещает клин 5 во внутреннем корпусе 32, смещая шток 42, который поворачивает держатель 3 на сферическом выступе втулки 39 и смещает шток 41 на плоской пружине 47,
отжимающей держатель 3 при возврате пружиной 8 клина 5 в крайнее положение поворотом микровинта 26 в противоположную сторону.
Формула изобретения
Микроманипулятор, содержащий позиционер, на котором установлена головка с держателем микроинструмента, привод перемещения держателя и блок дистанционногоуправления,имеющий
микрометрические винты с гайками, установленными в корпусе блока с возможностью их продольного перемещения, отличающийся тем, что, с целью повышения надежности, точности позиционирования
микроинструмента и снижения габаритов, головка выполнена в виде набора расположенных друг в друге с возможностью относительного поперечного перемещения прямоугольных полых подпружиненных
друг относительно друга корпусов, привод выполнен в виде набора гибких тросиков, одни концы которых соединены с гайками соответствующих микровинтов, а другие концы тросиков, кроме одного, - с полыми
клиньями, в полостях которых расположены пружины растяжения, соединяющие каждый клин с соответствующим полым корпусом, при этом второй конец указанного одного тросика пропущен через осевое отверстие дополнительно введенной втулки, имеющей две наружные сферические поверхности, и соединен с держателем микро- инструмента,подпружиненного
относительно этой втулки, а во внутреннем
полом корпусе выполнены сферическое гнездо под одну сферическую поверхность втулки и пазы под дополнительно введенные подпружиненные сухари, взаимодействующие с второй сферической
поверхностью втулки и с соответствующими двумя полыми клиньями, расположенными во взаимно перпендикулярных плоскостях, при этом третий полый клин расположен между первым (наружным) и вторым корпусами, а четвертый клин - между вторым и третьим корпусами во взаимно перпендикулярных плоскостях.
| название | год | авторы | номер документа |
|---|---|---|---|
| Микроманипулятор для микрохирургии | 1984 |
|
SU1238016A1 |
| Устройство для изготовления стеклянных микроинструментов | 1983 |
|
SU1183469A1 |
| Автомат для изготовления изделий из проволоки | 1983 |
|
SU1266621A1 |
| Установка для нанесения растрового рельефа на матрицу | 1972 |
|
SU568929A1 |
| Вакуумный манипулятор | 1990 |
|
SU1754442A1 |
| Устройство для упаковывания пачек бумаг в рукавный термосклеивающийся материал | 1989 |
|
SU1659301A1 |
| Устройство для инъекций | 1981 |
|
SU1127596A1 |
| Автомат для изготовления изделий из проволоки | 1986 |
|
SU1389917A2 |
| Устройство для тренировки пловцов | 1988 |
|
SU1523154A1 |
| Устройство для юстировки оптического элемента | 1990 |
|
SU1781660A1 |
иг. f
:7ft
WW
i / 5
- N.
r A
am
ZL „- j-s
Л
:7ft
,
(-v
4 T .
,M///
s fe к i
Я37%уЈ & J7
/////////
16 ь
ГГ1
47 4 6it
®uz4
Составитель С. Новик Техред М.Моргентал
h
Корректор М. Андрушенко
| Информационный лист | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
