Изобретение относится к управлению транспортными средствами с двумя ведущими колесами с индивидуальным электроприводом и может быть использовано для управления инвалидными колясками, злек- тропогрузчиками и т.п.
Известно устройство для управления электроприводом транспортного средства, содержащее два блбка упраБления тяговыми двигателями ведущих колес, каждый из которых имеет аналоговый и релейный вход задания соответственно скорости и направления вр ащения тягового двигателя, управ- ляющий рычаг, выполненный с возможностью вращения относительно двух взаимно перпендикулярных осей, с каждой из которых связан соответственно задатчик скорости и задатчик рассогласования скоростей тяговых двигателей, выполненные в виде потенциометров, два сумматора, два пороговых элемента и инвертор, причем выход первого потенциометра подключен к первым входам обоих сумматоров, а выход второго потенциометра - к входу инвертора и второму входу первого сумматора, причем второй вход второго сумматора соединен с выходом инвертора, а выходы сумматоров - с аналоговыми входами блоков управления и входами пороговых элементов, к выходам которых подключены релейные входы блоков управления 1.
Указанное устройство принято а качестве прототипа. Отметим, что в прототипе совокупность блоков управления тяговыми двигателями, двух сумматоров и инвертора представляет собой схему управления, имеющую один вход (точка соединения первых входов обоих сумматоров) для задания скорости совместного вращения тяговых двига- телей и второй вход (точка соединения .входа инвертора и второго входа первого сумматора) для задания рассогласования скоростей тяговых двигателей и два выхода для подключения тяговых двигателей.
Недостаток прототипа заключается в том, что поскольку скорость совместного вращения и рассогласование скоростей тяговых двигателей задаются независимо друг от друга, то при большой скорости деи- жения и большом рассогласовании скоростей (малом радиусе поворота) возможно опрокидывание транспортного средства за счет центробежной силы.
С целью устранения указанного недо- статка дополнительно предусмотрены блок деления, блок выделения модуля и инвертор, причем выход потенциометра зздатчи- ка рассогласования скоростей подключен к первому входу блока деления, выход источника регулируемого напряжения подключен к второму входу блока деления, выход которого подключен к первому питающему зажиму потенциометра задатчика скорости и через инвертор - к второму питающему зажиму указанного потенциометра.
На чертеже представлена схема предлагаемого устройства управления.
Транспортное средство содержит два ведущих колеса 1 и 2 с электродвигателями 3 и 4, подключенными к питаемой от аккумулятора 5 схеме управления 6, которая имеет вход 7 для задания скорости совместного вращения тяговых двигателей и вход 8 для задания рассогласования скоростей левого и правого двигателя. Управляющий рычаг 9, который может перемещаться относительно двух взаимно перпендикулярных осей в направлениях вперед-назад и влево-вправо механически связан с движками соответственно потенциометра 10 задания скорости совместного вращения обоих двигателей, движок которого подкл ючен к входу 7 схемы управления 6, и движком питаемого от аккумуляторной батареи потенциометра 11 задания рассогласования скоростей обоих двигателей, движок которого подключен к входу 8 схемы управления и через блок выделения модуля 12 к первому входу блока деления 13, к второму входу которого подключен источник регулируемого напряжения 14. Выход блока деления подключен соответственно непосредственно и через инвертор 15 к двум зажимам питания потенциометра 10,
Физические основы работы устройства управления поя сняются векторной диаграммой на чертеже, где /л, Vn - скорость поступательного движения левого и правого колеса; V - скорость центра симметрии ко- пяски; Д V - рассогласование скоростей левого и правого колеса; 21 - расстояние между колесами 1 и 2. При скорости движения V центробежная сила, действующая на коляску с массой m при повороте с радиусом R, равна
р m Vх h R
О)
В свою очередь, как следует из рассмотрения векторной диаграммы, кривизна траектории тележки при рассогласовании равна
ДУ 2 V I
(2)
Из(1)и (2) следует
V 2IF
(3)
m -ZW
Максимально допустимая центробежная сила по условию опрокидывания коляски равна5
где h - высота расположения центра тяжести транспортного средства или с учетом (3) максимально -допустимая скорость при данном рассогласовании скоростей равна
V
1
max
AV
Отсюда следует, что при фиксировании I допустимая скорость зависит не только от рас- согласования А V, но и от высоты центра тяжести транспортного средства.
В соответствии со сказанным напряжение питания потенциометра 10 должно изменяться обратно пропорционально скорости движения V, поэтому выходной сигнал V с движка потенциометра 11 через блок выделения модуля 12 подключен к входу делителя блока деления 13, а вход делимого - к выходу источника регулируемого напряжения 14, выходной сигнал которого устанавливают равным 2gl2/h. При этом напряжение питания потенциометра 10 (а следовательно, скорость V при максимальном отклонении управляющего рычага вперед или назад) не может превышать Vmax для заданного рассогласования AV.
Устройство работает следующим образом.
При выведении управляющего рычага 9 из нейтрального положения (например, вперед-вправо) на входы 7 и 8 схемы управления поступают сигналы задания V и AV, пропорциональные углам отклонения управляющего рычага от нейтрального положения в направлении вперед и вправо. Соответственно, левое колесо ускоряется, а правое замедляется относительно средней скорости V и транспортное средство поворачивается вправо.
Напряжение А V через блок выделения модуля 12 подается на вход делимого блока деления 13 и, поскольку на вход делителя блока 13 одновременно с выхода источника регулируемого напряжения 14 поступает, как указывалось выше, напряжение, пропорциональное 2gl /h, то напряжение питания потенциометра 10, а следовательно, и скорость поступательного движения транс
0
5
0
0
5 5
0
5
5
портного средства автоматически изменяется обратно пропорционально рассогласованию скоростей А V левого и правого колес. Таким образом, при малом радиусе поворота автоматически снижается скорость V, что исключает опасность опрокидывания транспортного средства под действием центробежной силы.
Предложенное техническое решение соответствует критерию существенные отличия, так как включает новые элементы - блок деления с двумя входами, блок выделения модуля, инвертор и источник регулируемого напряжения Введение указанных элементов придает объекту разработки новое положительное качество - устранение опасности опрокидывания транспортного средства на поворотах, что позволяет сделать выеод о соответствии предложения упомянутому критерию.
Формула изобретения Устройство управления транспортным средством, содержащее два тяговых электродвигателя для привода левого и правого ведущих колес, питаемую от аккумуляторной батареи схему управления указанными двигзтепями, имеющую два выхода, к которым подключены указанные двигатели, и два входа, служащие соответственно для задания скорости совместного вращения и рассогласования скоростей тяговых двигателей, управляющий рычаг, выполненный с возможностью вращения относительно двух взаимно перпендикулярных осей, с каждой из которых связаны соответственно задатчики скорости и рассогласования скоростей ведущих колес, выполненные в виде двух потенциометров, чыходы которых подключены соответственно к первому и второму входам системы управления, отличающееся тем, что, с целью предотвращения опрокидывания транспортного средства при малом радиусе поворота и большой скорости движения, оно снабжено блоком деления, блоком выделения модуля, инвертором и источником регулируемого напряжения, причем выход потенциометра задатчика рассогласования скоростей подключен к первому входу бпока деления, выход источника регулируемого напряжения подключен к второму входу блока деления, выход которого подключен к первому питающему зажиму потенциометра задатчика скорости и через инвертор - к второму питающему зажиму указанного потенциометра, а оба питающих входа потенциометра задатчика рассогласования скоростей подключены к зажимам аккумуляторной батареи.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом транспортного средства с тяговыми двигателями, преимущественно независимого возбуждения | 1990 |
|
SU1766726A1 |
| Многодвигательный электропривод | 1991 |
|
SU1774457A1 |
| Устройство для управления транспортным средством | 1989 |
|
SU1740211A1 |
| Устройство для регулирования скорости транспортного средства | 1986 |
|
SU1428618A1 |
| Устройство для регулирования частоты вращения тяговых двигателей прицепа | 1979 |
|
SU935332A2 |
| Устройство для моделирования динамики движения гусеничной машины | 1980 |
|
SU940186A2 |
| Устройство для регулирования частоты вращения тяговых двигателей прицепа транспортного средства | 1981 |
|
SU1004169A2 |
| Устройство для регулирования тягового электропривода автономного транспортного средства | 1987 |
|
SU1546307A2 |
| Устройство для управления частотно-регулируемым многодвигательным электроприводом | 1984 |
|
SU1252906A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2187437C1 |
Использование: управление транспортными средствами с индивидуальным электроприводом ведущих колес. Сущность: устройство содержит два ведущих колеса 1 и 2 с индивидуальными тяговыми двигателями 3 и 4, питаемыми от общей схемы управления 6, управляющий рычаг 9, связанный с задатчиками 10 и 11 скорости и рассогласования скоростей приводных двигателей, блок выделения модуля 12, блок деления 13, источник регулируемого напряжения 14 и инвертор 15. задатчик скорости запитан напряжением, обратно пропорциональным выходному сигналу задатчика рассогласования скоростей тяговых двигателей левого и правого колес, поэтому при задании резкого поворота поступательная скорость транспортного средства автоматически снижается. 1 ил., en с VI о о VI ю ел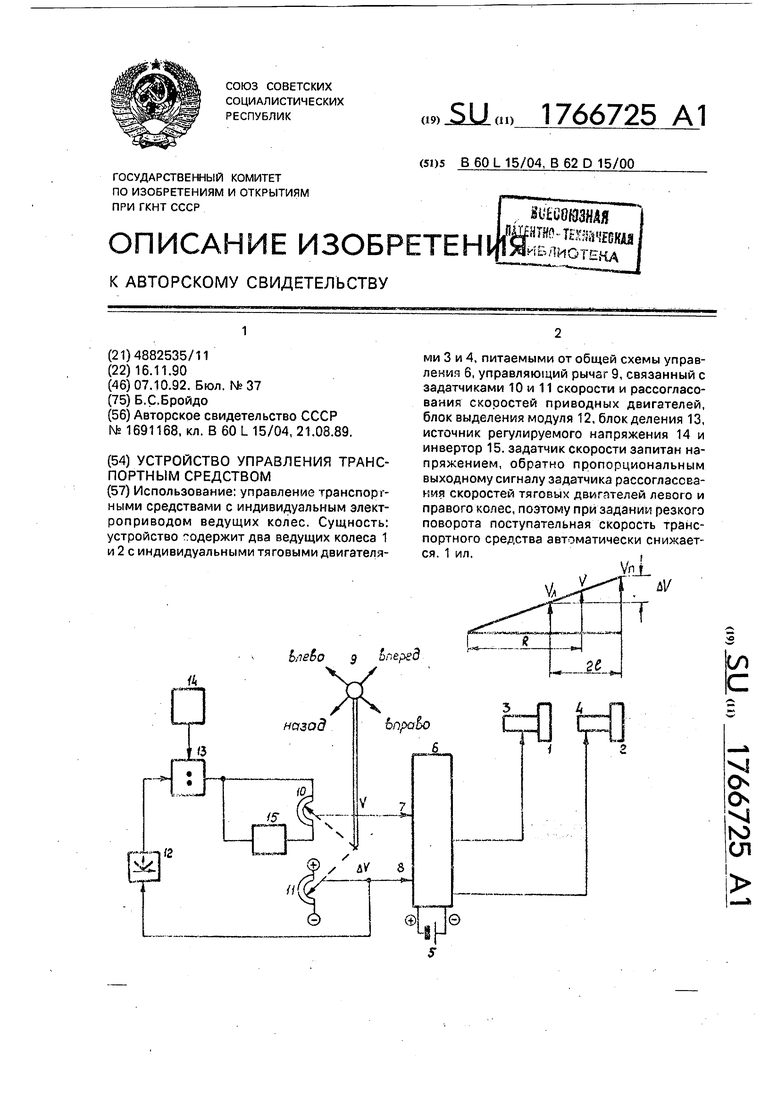
| Устройство для управления электроприводом транспортного средства | 1989 |
|
SU1691168A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
