(54) УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ЧАСТОТЫ ВРАЩЕНИЯ ТЯГОВЫХ ДВИГАТЕЛЕЙ ПРИЦЕПА ТРАНСПОРТНОГО СРЕДСТВА

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования частоты вращения тяговых двигателей прицепа | 1979 |
|
SU935332A2 |
| Способ управления движением активного многозвенного транспортного средства и устройство для его осуществления | 1982 |
|
SU1094790A1 |
| Двухзвенное транспортное средство | 1987 |
|
SU1426864A1 |
| Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства и устройство для его осуществления | 2020 |
|
RU2751471C1 |
| МНОГОФУНКЦИОНАЛЬНОЕ СЦЕПНОЕ УСТРОЙСТВО ПРИЦЕПА | 2015 |
|
RU2613140C2 |
| СПОСОБ УПРАВЛЕНИЯ n-ОСНЫМ ПРИЦЕПОМ ТЯГАЧА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2609643C1 |
| Транспортное средство | 1983 |
|
SU1087375A1 |
| Транспортное средство сельскохозяйственного назначения | 1981 |
|
SU1001880A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2001 |
|
RU2187437C1 |
| ПРИВОДИМАЯ ХОДОВАЯ ЧАСТЬ С РУЛЕВЫМ УПРАВЛЕНИЕМ | 2004 |
|
RU2347707C2 |
1
Изобретение относится к транспорту, в частности к устройствам для стабилизации курсовой устойчивости и улучшающим повбрачиваемость сочлененных транспортных средств с активными колесами прицепа.
По основному авт. св. № 935332 известно устройство для регулирования частоты вращения тяговых двигателей прицепа, содержащее индивидуальные преобразователи частоты, соединенные с тяговыми двигателями прицепа, питаемые от силового генератора, приводимого во вращение тепловым двигателем тягача, блоки управления преобразователями, сумматоров, вычитающий и один из суммирующих входов каждого из которых соединены с блоком сравнения, блоком задания буксования и датчиками частоты вращения ведущих колес тягача, датчиками буксования ведущих колес тягача и прицепа, своими входами соединенными с входами блоков сра1внения, другие входы которых подключены к блоку задания буксования, а выходы датчиков частоты вращения ведущих колес тягача соединены со вторыми суммирующими входами суммато- . ров, дополнительные сумматоры, включенные между выходами сумматоров и входами
блоков управления преобразователями и датчиком положения прицепа, подключенным к другим входам дополнительных сумматоров 1 .
Недостатком известного устройства является то, что оно не обеспечивает необходимой точности регулирования частоты вращения тяговых двигателей прицепа при движении на повороте и ухудщает поворачиваемость сочлененного транспортного средства, так как работа его направлена на уст10ранение угла излома между продольными осями тягача и прицепа,что приводит к увеличению разворотной полосы и затрудняет управление.
Цель изобретения - повыщение точнос15 ти регулирования частоты вращения тяговых двигателей прицепа при движении на повороте.
Поставленная цель достигается тем, что устройство снабжено датчиком угла поворота тягача, неподвижная часть которого
20 связана с корпусом тягача, подвижная часть кинематически связана с механизмом рулевого управления, а выходы электрически связаны с третьими входами соответствующих дополнительных сумматоров.
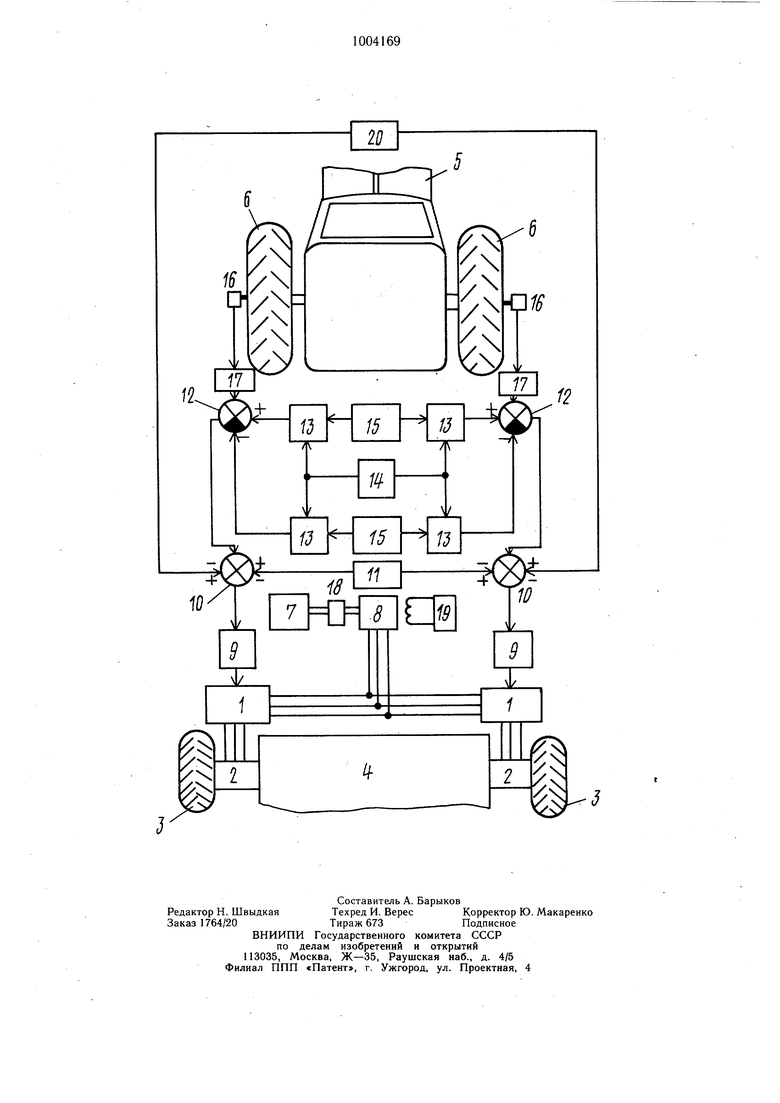
На чертеже представлена блок-схема устройства.
Устройство состоит из преобразователей 1 частоты, соединенных с тяговыми двигателями 2, приводящими во .вращение ведущие колеса 3 прицепа 4. Прицеп 4, например сельскохозяйственная машина, связана с тягачом 5, например, трактором, имеющим ведущие колеса 6, приводимые во вращение тепловым двигателем 7, к которому присоединен силовой генератор 8. Преобразователи частоты соединены с блоками 9 управления, управляющие входы которых соединены соответственно с входами дополнительных сумматоров 10. Входы дополнительных сумматоров 10 соединены с выходами датчика 11 положения прицепа и выходами сумматоров 12 соответственно. Суммирующий и вычитающий входы каждого из сумматоров 12 соединены с блоками 13 сравнения. К одному из входов каждого блока 13 сравнения подключен блок 14 задания буксирования, а к другим входам - датчики 15 буксования. На ведущих колесах 6 тягача 5 установлены датчики 16 частоты вращения, которые присоединены к вторым суммирующим входам сумматоров 12. В случае разного диаметра ведущих колес 6 тягача 5 и ведущих колес 3 прицепа 4 это соединение осуществляется через компенсирующие блоки 17. Силовой генератор 8 приводится от теплового двигателя 7 тягача 5 через повыщающий редуктор 18 и оборудован системой возбуждения 19. Датчик 20 угла поворота тягача, связанный с рулевым механизмом, выходы которого соединены с соответствующими третьими входами дополнительных сумматоров 10.
Силовой электрический генератор 8 представляет собой синхронный электрический генератор повыщенной частоты, приводимый во вращение дизелем. 7 трактора 5 через повыщающий редуктор 18 и служащий для получения трехфазного напряжения постоянной амплитуды и частоты.
Система возбуждения 19 генератора 8 выполнена в виде управляемого выпрямителя и служит для поддержания напряжения генератора 4 на номинальном уровне или регулирования его по определенному закону.
Вентильная часть преобразователей 1 частоты с непосредственной связью представляет собой три группы (по количеству выходных фаз) встречномтараллельно включенных тиристоров, циклическое переключение которых позволяет преобразовать напряжение генератора 8 постоянной частоты и амплитуды в напряжение регулируемой частоты и амплитуды, которое поступает на электрические двигатели 2 мотор-колес 3.
Система управления 9 преобразователей частоты 1 включает устройство управления режимом работы электродвигателя, определяющее частоту и амплитуду напряжения на выходе преобразователя, фазосмещающего устройства, устройство формирования напряжения управления, выход которого подключей к выходу фазосмещающего устройства и усилители импульсов, подаваемых на управляющие переходы силовых тиристоров.
Мотор-колеса 3 выполнены в виде отдельного агрегата, включающего электродвигатель 2, редуктор и собственно колесо и могут использоваться на различных по назначению и конструкции сельскохозяйственных мащинах для активизации их xdдового аппарата. Датчики 16 частоты вращения представляют собой тахогенераторы,
связанные с ведущими колесами 6 трактора 5, выходное напряжение которых пропорционально теоретической (без учета буксования) скорости движения трактора. Компенсирующие блоки 17 выполнены в
виде усилителей с регулируемым коэффициентом усиления для компенсации разности диаметров колес трактора и моторколес сельскохозяйственной машины.
Датчики 15 буксования ведущих колес 6 тягача 5 и ведущих колес 3 прицепа 4 выполнены на принципе допплеровского смещения частот ультразвуковых волн и содержит один общий излучатель-приемник энергии ультразвуковой частоты (не показано), направленный на опорную поверхность, и по
два излучателя приемника, направленные соответственно на ведущие колеса 6 тягача 5 и ведущие колеса 3 прицепа 4. Выходы излучателей-приемников соединены с входами электронного устройства обработки сигналов, выходы которого являются выходами датчиков 15 буксования.
Блок 14 задания буксованияможет быть выполнен в виде потенциометра, выходное напряжение которого пропорционально величине максимального буксования колес тягача и мотор-колес прицепа.
Блоки сравнения 13 вьщолнены в виде усилителей, один из выходов которых., связан с блоком задания 14 буксования, а другой -- с выходом датчика 15 буксования
колес 6 тягача 5 или буксования мотор-колес 3 прицепа 4.
Компенсирующие блоки 17 и дополнительные сумматоры 10 выполнены на основе суммирующих усилителей. Датчик 11 положения прицепа представляет собой резистивный датчик положения, неподвижная часть которого связана с тягачом, а подвижная - с прицепом. При совпадении продольных осей тягача и прицепа на выходе датчика 11 положения прицепа сигнал отсутствует, а при появлении угла излома
между продольными осями тягача и прицепа на выходах датчика 11 появляются сигналы, пропорциональные этому углу излома и соответствующего знака. Датчик 20 угла поворота тягача выполнен в виде резистивного датчика положения, неподвижная часть которого связана с остовом тягача, а подвижная - с механизмом рулевого управления, например с рулевой сошкой, угол поворота которой определяет угол поворота тягача. При движении сочлененного транспортного средства по прямой, когда управляемые колеса тягача находятся в нейтральном положении, на выходах датчика 20 угла поворота управляющий сигнал отсутствует, а при повороте управляемых колес на выходах датчика 20 появляются сигналы, пропорциональные углу поворота и соответствующего знака. Устройство работает следующим образом. При движении сочлененного транспортного средства по прямой сигналы от датчиков 16 частоты, вращения колес тягача поступают на компенсирующие блоки 17, выходные сигналы которых поступают на блоки суммирования 12. Выходной сигнал от датчика 15 буксования колес тягача поступает на блоки 13 сравнения, в которых происходит сравнение его с сигналами от блока задания 14 буксования, на выходе блоков 13 сравнения, связанных с датчиком 15 буксования колес тягача, появляется сигнал, пропорциональный величине, на которую буксование колес тягача превысило заданную величину. Этот сигнал от блоков 13 сравнения, связанных с датчиком 15 буксования колес тягача, суммируется с задающим сигналом от компенсирующего блока 17 в сумматоре 12, выходной сигнал которого поступает на дополнительный сумматор 10, а затем на систему управления 9 преобразователем 1 частоты, увеличивая частоту и амплитуду выходного напряжения преобразователя, а следовательно и поток мощности, передаваемый на электродвигатели 2 мотор-колес 3i. В этом режиме выходные сигналы от датчика, 11 положения прицепа и датчика 20 угла поворота колес тягача равны нулю и никакого влияния на работу системы не оказывают. Для улучшения поворачиваемости сочлененного транспортного средства при повороте необходимо поддерживать заданный угол излома между продольными осями тягача и прицепа. При движении на повороте, когда управляемые колеса тягача повернуты, сигналы с выходов датчика 20 угла поворота, величины которых пропорциональны углу поворота тягача, поступают на третьи входы дополнительных сумматоров 10. На вторые входы дополнительных сумматоров 10 подаются сигналы от датчика 11 положения прицепа, а первые входы дополнительных сумматоров 10 подключены через компенсирующие блоки 17 и сумматоры 12 к датчикам 16 частоты вращения ведущих колес тягача. Сигналы от датчика 20 угла поворота и от датчика 11 положения прицепа поступают на дополнительные сумматоры 10 с различными знаками и компенсируют друг друга. Заданный угол, поворота между продольными осями тягача и прицепа поддерживается за счет разницы в величинах сигналов датчиков 16 частоты вращения ведущих колес тягача. Сигнал с датчика 16 внутреннего колеса (движущегося по кривой меньщего радиуса) по величине меньще сигнала с датчика 16 внещнего колеса. При этом на вход системы 9 управления преобразователем 1 частоты, который управляет тяговым двигателем колеса прицепа, по внутреннему борту поступает сигнал меньший, чем на систему 9 управления преобразователем 1 частоты, управляющий двигателем внещнего борта. Это приводит к выравниванию линейных скоростей ведущих колес тягача и прицепа, расположенных по одному борту, а следовательно поддерживается заданный угол излома и прицеп двигается по траектории тягача. Использование предлагаемой системы улучшения поворачиваемости сочлененного транспортного средства с активными колесами прицепа позволяет улучшить маневренность агрегата, облегчить работу водителя, а следовательно, увеличить производительность. Формула изобретения Устройство для регулирования частоты вращения тяговых двигателей прицепа транспортного средства по авт. св. № 935332, отличающееся тем, что, с целью повышения точности регулирования частоты вращения тяговых двигателей прицепа при движении на повороте, оно снабжено датчиком угла поворота тягача, неподвижная часть которого связана с корпусом тягача, подвижная часть кинематически связана с механизмом рулевого управления, а выходы электрически связаны с третьими входами соответствующих дополнительных сумматоров. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 935332 по заявке № 2824290, кл. В 60 L 15/32, 27.03.81 (прототип).
